
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Тема 1 Цепи однофазного переменного токаСтр 1 из 5Следующая ⇒
ЧАСТЬ 1 ЭЛЕКТРОТЕХНИКА Тема 1 Цепи однофазного переменного тока Переменный ток Основные понятия и определения В технике переменный ток – это ток, периодически изменяющийся по величине и направлению (обычно по синусоидальному закону). Мгновенное значение ЭДС в витке генератора переменного тока e = Emsin(wt + y) Em – амплитуда (максимальное значение гармонической функции) (wt + y) – фаза колебания y – начальная фаза (при t = 0) T – период колебания (время полного цикла колебания) f = 1 / T – циклическая частота (число циклов в сек.) w = 2p / T = 2pf – угловая частота – скорость изменения фазы колебания.
Для различных значений ЭДС, тока и напряжения принято использовать следующие обозначения: e, i, u – мгновенные значения ЭДС, тока и напряжения Em, Im, Um – амплитудные значения ЭДС, тока и напряжения Eср, Iср, Uср – средние значения ЭДС, тока и напряжения E, I, U – действующие значения ЭДС, тока и напряжения.
Среднее значение синусоидального тока характеризует изменение заряда за время D t (DQ = Iср Dt)
Известно, что среднее значение любой гармонической функции за период равно нулю. Поэтому принято определять среднее значение переменного тока на интервале Т/2. После простейшего интегрирования получим:
Средние значения дают возможность легко рассчитать суммарный заряд при электролизе, при зарядке аккумулятора, при анализе выпрямительных устройствах и т.д.
Действующее значение переменного тока I равно такому постоянному току I0, который обеспечивает равное тепловое или энергетическое воздействие. Если посчитать энергию постоянного и переменного тока за половину периода, то после интегрирования мы получим следующее выражение для действующего значения тока (аналогично определяются действующие значения ЭДС и напряжения)
Векторное изображение гармонических функций Если гармоническую функцию изобразить в виде вектора с длинной, равной его амплитуде, и вращать этот вектор против часовой стрелки с постоянной угловой скоростью w то в любой момент времени проекция этого вектора на вертикальную ось OY будет равна мгновенному значению этой гармонической функции.
Векторное представление позволяет избавиться от проблем, связанных со сложением гармонических функций с различными амплитудами, и перейти к их векторному суммированию. Естественно, что при этом приходится учитывать их взаимную ориентацию, но это один из наиболее простых и наглядных способов расчета цепей переменного тока.
Из курса физики известно, что для мгновенных значений в цепях переменного тока справедливы все законы постоянного тока (Ома, Кирхгофа и т.д.). Эти же законы будут справедливы и для амплитудных и действующих значений при условии векторного сложения входящих в них величин. Цепь переменного тока с активным сопротивлением
i = Im sin (ω t)
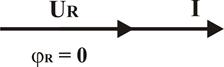
uR =? φ R =? u = iR = RIm sin ω t = Um sin ω t
Закон Ома для действующих значений
i = Im sin (ω t) uR = UmR sin ω t На активном сопротивлении напряжение и ток совпадают по фазе, т. е. угол сдвига фаз между током и напряжением jR = 0
Цепь переменного тока с индуктивностью Идеальная индуктивность (L – const, RL = 0)
i = Im sin (ω t)
uL =? φ L =?
При любом изменении тока в катушке индуктивности возникает ЭДС самоиндукции (закон Фарадея) которая противодействует этому изменению (правило Ленца).
Индуктивное падение напряжения можно найти из II закона Кирхгофа для данной цепи
uL + eL = 0 => uL = – eL = – w L Im cos wt = UmL sin (wt + p/2)
Закон Ома для цепи с индуктивностью
XL = wL = 2pfL – реактивное индуктивное сопротивление XL = [ Ом ]; L = [ Генри ]: f = [Гц] Физический смысл индуктивного сопротивления – в возникновении ЭДС самоиндукции, препятствующей изменению тока.
i = Im sin (ω t) eL = EmL sin (ω t – π /2)
uL = UmL sin (ω t + π /2)
На индуктивности напряжение опережает ток на 900, т. е. угол сдвига фаз между током и напряжением jL = + p/2
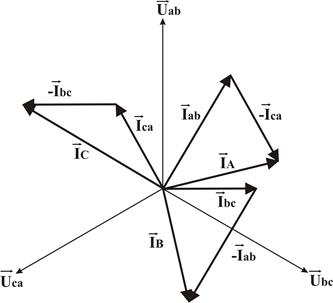
Пример расчета трехфазной нагрузки, соединенной Порядок построения ВД 3.1. Строим 3 вектора фазных напряжений
3.2. Относительно каждого из этих напряжений строим фазные токи 3.3.Складываем геометрически фазные токи и находим ток в нейтральном проводе
Порядок построения ВД 2.1. Строим 3 вектора фазных напряжений 2.2. Относительно каждого из этих напряжений строим фазные токи 2.3. Строим вектор линейного тока – из фазного тока
При обрыве одной из фаз ток в этой фазе равен 0, токи в двух оставшихся фазах и все фазные напряжения не изменяются. Линейные токи определяются по векторной диаграмме, как и в предыдущем случае. При обрыве линейного провода система перестает быть трехфазной. Схема представляет из себя две параллельные ветви, включенные между двумя оставшимися линейными проводами. Фазные и линейные токи можно определить на основе методов расчета цепи с параллельным соединением элементов. Назначение – преобразование переменного тока одного напряжения в переменный ток другого напряжения без изменения частоты, т.е. для повышения или понижения напряжения. Без трансформаторов передача электроэнергии на большие расстояния была бы невозможна. Применение – очень широкое – вся силовая энергетика, практически все бытовые и промышленные электронные устройства и т.д.
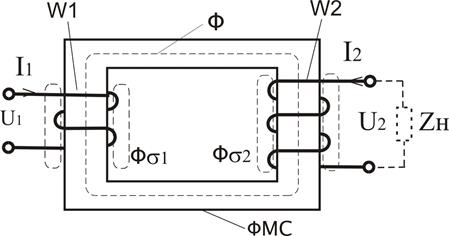
Устройство – две или более обмоток, расположенных на замкнутом ферромагнитном сердечнике (ФМС). Обмотка, которая подключается к сети, называется первичной.К остальным обмоткам (вторичным) подключаются нагрузки. Принцип действия трансформатора основан на явлении электромагнитной индукции – законе Фарадея. При подключении первичной обмотки W1 к сети переменного тока с напряжением ~ U1 по ней течет переменный ток ~ I1, который будет создавать переменный магнитный поток Ф1. Основная часть этого потока Ф распространяется по ФМС (основной поток), пронизывает витки вторичной обмотки W2 и индуктирует в них ЭДС E2 (закон Фарадея). (при любом изменении магнитного потока в каждом витке индуктируется ЭДС, пропорциональная скорости изменения магнитного потока e ~ – dФ/dt. Если же ток постоянный, то Ф–const, => dФ/dt = 0, => e = 0, т.е. постоянный поток ЭДС не создает, => трансформатор не работает на постоянном токе). Если W2 > W1 то ЭДС вторичной обмотки Е2 > E1 => U2 > U1 – трансформатор повышающий. Если W2 < W1 то ЭДС вторичной обмотки Е2 < E1 => U2 < U1 – трансформатор понижающий. Назначение ФМС – ФМС служат для усиления магнитного поля и придания ему нужной конфигурации. При введении в катушку ФМС он намагничивается и его собственное магнитное поле складывается с полем катушки. В результате магнитный поток (МП) резко возрастает (приблизительно в m раз). m – магнитная проницаемость ФМС (до 10 000). Следовательно, используя ФМС, при том же токе в катушке можно получить в m раз больший МП, или заданный МП получить при в m раз меньшем токе в обмотке. Это огромный плюс использования ФМС. Но есть и минусы. –– В ФМС возникают дополнительные потери энергии (потери в стали) Рст = Рвт + Рг 1. Вихревые потери Рвт – ток переменный => МП переменный, он будет в самом ФМС индуктировать ЭДС (закон Фарадея), сердечник проводящий, по нему текут вихревые токи, которые разогревают сердечник. Для уменьшения этих потерь сердечники делают не сплошными, а набирают из тонких изолированных пластин, или прессуют из ферромагнитного порошка с диэлектрическим связующим. 2. Гистерезисные потери Рг – или потери на перемагничивание. Ток переменный, при каждом изменении направления тока ФМС перемагничивается, на это тратится энергия, пропорциональная частоте и площади петли гистерезиса. Для уменьшения этих потерь ФМС изготавливают из магнито-мягких материалов с узкой петлей гистерезиса. Потоки в трансформаторе Ф – основной поток – в ФМС Фs1 и Фs2 – потоки рассеяния каждой обмотки. Это часть потока, которая распространяется не по ФМС, а по воздуху. Но эти потоки малы, т.к. магнитное сопротивление воздуха в mФМС раз больше чем у ФМС (mвоздуха=1, а mФМС до 10000). Тема 4 Электродвигатели ЭД – электродвигатель ИМ – исполнительный механизм МХ – механическая характеристика СД – синхронный двигатель АД – асинхронный двигатель ДПТ – двигатель постоянного тока МП – магнитный поток
Основные типы МХ ИМ
1. MC не зависит от n – лифты, подъемники 2. MC линейно зависит от n – пара двигатель–генератор 3. Параболическая зависимость MC от n – вентиляторы, компрессоры и т.д. Чтобы оценить свойства привода достаточно наложить МХ ИМ на МХ ЭД. Возьмем МХ АД и наложим на нее МХ трех вентиляторов АД + ИМ1 – возможен пуск (МпускАД > МпИМ1) и устойчивое вращение со скоростью n1 (MАД = МИМ1) АД + ИМ2 – пуск невозможен (МпускАД < МпИМ2) но если раскрутить, то возможно устойчивое вращение со скоростью n2 (MАД = МИМ2) АД + ИМ3 несовместимы, МХ не пересекаются (МАД всегда < МИМ3) Асинхронные двигатели (АД). Основные уравнения АД Скольжение – относительная разность скорости МП n1 и ротора n. Скорость изменения МП в роторе пропорциональна разности скоростей (n1 – n), т.е. скольжению => ЭДС ротора Е2S, частота тока в роторе f2S и индуктивное сопротивление ротора X2S пропорциональны скольжению S E2S = E2 S (4.3) f2S = f2 S (4.4) X2S = X2 S (4.5)
где: E2, f2=f1, X2 – ЭДС, частота и индуктивное сопротивление неподвижного ротора (при n = 0, S = 1). Электромагнитные процессы в АД такие же, как в трансформаторе (при n=0, S=1 АД – это трансформатор с короткозамкнутой вторичной обмоткой), поэтому для анализа АД можно использовать основные уравнения трансформатора с учетом соотношений 4.3 – 4.5 Из уравнения трансформатора (3.5) (U2 = E2 – I2rm2 – I2xs2), учитывая, что ротор короткозамкнут (ZН = 0 => U2 = 0) получим для АД
Из (4.6) ток ротора I2 Z2 – полное сопротивление вращающегося ротора (зависит от S, т.е. от n). Момент вращения АД Момент вращения пропорционален силе Ампера – силе, действующей на проводник с током в МП Мвр ~ FA ~ I2 B sin(B^I2) B ~ Ф ~ U1
sin(B^I2) ~ cos(E2 ^I2) ~ r2 / Z2
1. Мвр ~ U12 => Мвр резко падает при уменьшении напряжения питания статора U1 2. Если n = n1, => S = 0, => Мвр = 0, т.е. скорость ротора n всегда меньше скорости МП статора n1. 3. Из условия dM/dS = 0 можно определить критическое скольжение, при котором момент АД будет максимальным
Sкр = r2 / x2
Подставив Sкр в уравнение 4.8 получим т.е. Мmax не зависит от активного сопротивления ротора r2. Это используется при пуске и регулировании скорости АД. Способы пуска АД При пуске скорость ротора n = 0, => разность скоростей МП n1 и ротора n (n1–n) – max, => dФ/dt – max, => ЭДС E2 – max => токи ротора I2 и статора I1 – max. При пуске АД в роторе и статоре текут токи много больше номинальных I2 = (7 ¸ 10) I2 ном I1 = (5 ¸ 7) I1 ном Это опасно и для АД и для питающей сети. Поэтому только маломощные АД (до 1 кВт) можно пускать без специальных методов пуска, которые нужны, чтобы: 1. Уменьшить пусковые токи. 2. Обеспечить плавный пуск при максимальном пусковом моменте. Принцип действия ДПТ. Постоянный ток возбуждения IВ, протекая по обмоткам возбуждения ОВ, создает постоянный магнитный поток Ф. К якорю, через щетки и коллектор, подводится постоянный ток якоря IЯ. Сила взаимодействия тока якоря IЯ и МП Ф (сила Ампера) создает момент вращения. Основные уравнения ДПТ. МВР ~ FА ~ IЯ Ф => МВР =CМ IЯ Ф (4.9) При вращении якоря в МП в нем индуктируется ЭДС индукции ЕЯ ЕЯ ~ dФ/dt ~ Ф и n => ЕЯ = CЕ Ф n (4.10) Эта ЭДС направлена навстречу напряжению питания якоря UЯ (правило Ленца) =>
Пуск ДПТ При пуске ДПТ якорь неподвижен => n = 0 => ЕЯ = CЕФn = 0 => IЯ ПУСК = (UЯ – EЯ) / rЯ = UЯ / rЯ > > IЯ НОМ (в 10 – 20 раз) Для уменьшения IЯ при пуске в цепь якоря вводят пусковой реостат rП после разгона двигателя этот реостат полностью закорачивают (реостат рассчитан только на кратковременный пусковой режим).
(Пуск 1 – rП = max), (Работа 2 – rП = 0) Регулирование скорости ДПТ
Из (4.10) ЕЯ = CЕ Ф n Из (4.11) ЕЯ = UЯ – IЯ rЯ => Изменять скорость n можно: 1. Изменяя напряжение питания UЯ 2. Изменяя ток якоря IЯ (последовательно с якорем включают реостат) 3. Изменяя ток возбуждения IВ => МП Ф – последовательно с ОВ включают регулировочный реостат rР. Изменяя сопротивление rp, можно менять IВ => Ф => n (см. 4.12). Этот метод используется чаще всего, т.к. IВ < < IЯ – проще регулировать, особенно для мощных ДПТ. ЧАСТЬ 1 ЭЛЕКТРОТЕХНИКА Тема 1 Цепи однофазного переменного тока Переменный ток Основные понятия и определения В технике переменный ток – это ток, периодически изменяющийся по величине и направлению (обычно по синусоидальному закону). Мгновенное значение ЭДС в витке генератора переменного тока e = Emsin(wt + y) Em – амплитуда (максимальное значение гармонической функции) (wt + y) – фаза колебания y – начальная фаза (при t = 0) T – период колебания (время полного цикла колебания) f = 1 / T – циклическая частота (число циклов в сек.) w = 2p / T = 2pf – угловая частота – скорость изменения фазы колебания.
Для различных значений ЭДС, тока и напряжения принято использовать следующие обозначения: e, i, u – мгновенные значения ЭДС, тока и напряжения Em, Im, Um – амплитудные значения ЭДС, тока и напряжения Eср, Iср, Uср – средние значения ЭДС, тока и напряжения E, I, U – действующие значения ЭДС, тока и напряжения.
Среднее значение синусоидального тока характеризует изменение заряда за время D t (DQ = Iср Dt)
Известно, что среднее значение любой гармонической функции за период равно нулю. Поэтому принято определять среднее значение переменного тока на интервале Т/2. После простейшего интегрирования получим:
Средние значения дают возможность легко рассчитать суммарный заряд при электролизе, при зарядке аккумулятора, при анализе выпрямительных устройствах и т.д.
Действующее значение переменного тока I равно такому постоянному току I0, который обеспечивает равное тепловое или энергетическое воздействие. Если посчитать энергию постоянного и переменного тока за половину периода, то после интегрирования мы получим следующее выражение для действующего значения тока (аналогично определяются действующие значения ЭДС и напряжения)
Популярное:
|
Последнее изменение этой страницы: 2016-03-25; Просмотров: 1187; Нарушение авторского права страницы









 => UR = I R
=> UR = I R


 => UL = I wL = I XL
=> UL = I wL = I XL

 со сдвигом на 1200
со сдвигом на 1200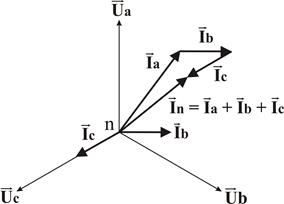
 , учитывая величину и направление угла сдвига фаз между током и напряжением.
, учитывая величину и направление угла сдвига фаз между током и напряжением.
 со сдвигом на 1200
со сдвигом на 1200 , учитывая величину и направление угла сдвига фаз между током и напряжением.
, учитывая величину и направление угла сдвига фаз между током и напряжением. по соотношению
по соотношению 
 вычитаем фазный ток
вычитаем фазный ток  (т.е. из конца вектора
(т.е. из конца вектора  и
и  .
. 


 (4.2)
(4.2) (4.6)
(4.6) (4.7)
(4.7)
 (4.8)
(4.8)
 уравнение цепи якоря (4.11)
уравнение цепи якоря (4.11)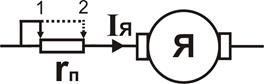
 (4.12)
(4.12)