
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Электронные вычислительные машины
Электронные вычислительные машины (ЭВМ) предназначены для выполнения различных логических и арифметических операций. По характеру перерабатываемой ими информации ЭВМ бывают аналоговые и цифровые. Аналоговые машины оперируют непрерывными сигналами и в автоматизированных системах применяются редко. Цифровые машины оперируют дискретными сигналами. По назначению ЭВМ можно разделить на три основных вида: расчетные, предназначенные для выполнения трудоемких научных и инженерных расчетов; управляющие, предназначенные для управления реальными процессами; информационные, предназначенные для логической обработки различных потоков информации. Расчетные ЭВМ характеризуются широким набором выполняемых операций, наличием двусторонних оперативных запоминающих устройств (ОЗУ) для записи, хранения и выбора программы решения задач и исходных данных системы ввода информации и фиксации результатов решения. Информационные ЭВМ отличаются большим разнообразием оперативных и внешних запоминающих устройств, широким набором логических операций, использованием различных способов обращения к запоминающим устройствам, развитым комплексом ввода-вывода информации и возможностью обработки как числовой, так и буквенной информации. Отличительной особенностью управляющих ЭВМ является наличие специальных преобразующих и согласующих устройств, непосредственно связанных с датчиками информации, с исполнительными цепями объектов управления, с локальными системами автоматического управления и регулирования, с устройствами ручного ввода. Характер и порядок выполнения операций, необходимых для осуществления ЭВМ требуемых функций, можно представить в виде четырех основных действий: формулировка и запись условий задачи и исходных данных; разработка способа решения задачи и представления его в виде логической последовательности операций (алгоритмов); выполнение заданий последовательности операций; представление результатов решения задачи в удобном для использования виде. Первые два из перечисленных основных действий выполняются человеком, последние два — вычислительной машиной. Возникновение микропроцессорной техники обусловлено экономической целесообразностью перехода от технических средств с жесткой логикой к универсальным программируемым устройствам, выполненным на основе крупносерийных больших интегральных схем (БИС). Структура таких БИС повторяет процессорную часть универсальных ЭВМ. МикроЭВМ — устройство, управляемое оператором, состоит из микропроцессора (МП), полупроводниковой памяти, интерфейса ввода-вывода, пульта управления и источников питания, объединенных общей конструкцией.
МикроЭВМ выпускаются в нескольких модификациях: · встраиваемые, предназначенные для конструктивного встраивания в технологическое и другое оборудование в качестве сборочной единицы и не имеющие индивидуального пульта управления, источника питания, декоративного оформления; · портативные сервисные, имеющие небольшой дисплей и легко транспортируемые; · настольные со встроенными, как правило, в единую конструкцию дисплеем, пультом, малогабаритным устройством печати, памятью на гибких дисках; · настольной и стоечной конструкции, содержащие набор отдельных конструктивно законченных модулей: микрокомпьютер, экранный пульт, малогабаритное печатающее устройство, память на гибких дисках, функционально объединенных в целостную автономную микросистему. Такие микросистемы используются в качестве персональных микроЭВМ, интеллектуальных терминалов больших вычислительных систем коллективного доступа, абонентских или рабочих станций локальных вычислительных сетей или элементов систем обработки информации и управления. Среди большого разнообразия микропроцессоров, применяемых в микроЭВМ, наибольшее распространение получили 16- и 32-разрядные МП. Разрядность МП влияет на скорость вычислений, поскольку если разрядность МП меньше длины хранимого в памяти слова, то обработка данных будет производиться с последовательными обращениями к памяти с затратами в два или более циклов обращения к памяти. В автоматике, телемеханике и вычислительной технике наибольшее распространение подучили микропроцессорные комплекты серии К580, в которых МП вместе с устройством управления реализован в виде отдельной БИС и имеет фиксированные разрядность и систему команд. Микропроцессорный комплекс серии К580 включает в себя микропроцессорную БИС, программируемое устройство ввода-вывода, программируемый блок приоритетного прерывания, программируемое устройство полупроводниковой динамической памяти, интегральный таймер, универсальный синхронноасинхронный программируемый приемопередатчик, программируемые и системные контроллеры. МикроЭВМ, построенная на базе комплекта, работает с тактовой частотой до 2 МГц. Схемы программируются с помощью фиксированного набора команд МП. На рис. 9.6 приведена упрощенная структурная схема микроЭВМ на базе МП КР580ИК80. В состав процессорного модуля (ПМ) входят МП и ряд вспомогательных схем, обеспечивающих работу МП. Микропроцессор КР580ИК80 предназначен для обработки 8-разрядных двоичных чисел, называемых словами или байтами, поэтому порты ввода-вывода должны быть 8-разрядными. Каждый периферийный модуль имеет вход для приема сигналов ВМ (выбор модуля), с помощью которого можно «активизировать» только один периферийный модуль. МП состоит из семи 8-разрядных регистров общего назначения (РОН):
Регистр А называется аккумулятором и используется для хранения операнда. С операндом работает арифметико-логическое устройство (АЛУ), выполняющее все действия с данными. Регистры В, С, D, Е, Н, L образуют регистровые пары для хранения 16-разрядных данных; в регистре PC подготавливается адрес очередной команды программы; по содержимому регистра SP осуществляется адресация к ячейкам памяти (в нем предварительно записывают код начала стековой области ОЗУ). Регистр F (флаги) представляет собой набор триггеров, регистрирующих результат последней операции, выполненной АЛУ. Устройства процессорного модуля ПМ используются для выбора команд из памяти и их выполнение. Пусть, например, должна быть считана и выполнена команда, хранящаяся в ячейке с адресом 1000. Для этого счетчик команд PC (программный счетчик) через шину адреса LUA выводит на устройство памяти адрес 1000. Из памяти на шину данных ШД поступает содержимое ячейки 1000, т.е. код операции, и МП записывает его в регистр кода операции SP. Этот регистр передает информацию дешифратору кода операции, который распознает код и выдает управляющие сигналы для схем синхронизации и управления, которые как бы представляют процессор внутри процессора. Постоянное запоминающее устройство (ПЗУ) внутри МП содержит микропрограмму, которая указывает МП, что делать для выполнения каждой команды. Записанная микропрограмма, задаваемая обычно пользователем, определяет язык МП и не может изменяться при записи программ, выполняемых МП. На схеме рис. 9.6 тонкими стрелками показаны шины 1, 3, 4 — считывания информации соответственно из оперативного (ОЗУ) и постоянного (ПЗУ) запоминающих устройств и устройств ввода-вывода (УВВ). Шины 2, 5 используются для записи информации в ОЗУ и УВВ. От шины адреса ША через дешифраторы ДШ по шинам ВМ (выбор модуля) осуществляется передача сигналов к портам ввода-вывода и запоминающим устройствам ОЗУ и ПЗУ Порты ввода и вывода по шинам 6 связаны с внешними устройствами. Процессорный модуль (ПМ) связан с шинами ША, ШД и ШУ через формирователь шин (ФШ). Для включения ПМ предусматривается автоматическая команда его начальной установки. При этом счетчик команд указывает начальный адрес программы. Так, МП КР580ИК80 нормально устанавливает на шине ША нулевой адрес. Далее программа выполняется автоматически под действием импульсов с тактового генератора (ТГ). Для выбора порта ввода-вывода или запоминающего устройства (ОЗУ, ПЗУ) служит шина управления (ШУ). По ней в микропроцессор поступают при необходимости сигналы от внешних устройств о готовности к передаче информации. Шины ША, ШУ и ШД содержат каждая столько проводов, сколько разрядов имеют передаваемые по ним кодовые комбинации. Другими словами, по ним к внешним цепям и обратно передаются параллельные кодовые комбинации. Такой способ связи микропроцессора с внешними цепями применяют тогда, когда расстояние между ними не более 15 м. В про-
Микропроцессор КР580ИК80 выполняет четыре основные операции: чтение данных из памяти или порта ввода; запись данных в память или порт вывода; внутренние операции (действия с регистрами общего назначения); передачу управления другой ячейке памяти. Применение персональных ЭВМ обеспечивает децентрализацию вычислительных процессов, значительное снижение стоимости машинного времени, повышение удобства работы персонала и эксплуатации сети. Характерной конструктивной особенностью микроЭВМ является модульность их построения. Все функциональные элементы этих машин строятся в виде отдельных модулей, т.е. отдельных плат, комплектных блоков. При размещении в стойках ЭВМ эти модули нуждаются в специальном монтаже. Поэтому при изменении и расширении системы установка новых модулей может выполняться самим пользователем. Кроме того, такая структура позволяет создавать наиболее экономную, без избыточности, конфигурацию микроЭВМ, ориентированную на выполнение заданных функций, при этом обеспечиваются минимальная стоимость и наименьшие размеры системы. Устройства связи с объектом Устройства связи с объектом (УСО) являются важнейшими элементами при использовании ЭВМ в АСУЭ. Они служат для автоматического ввода в ЭВМ информации поступающей от датчиков электрических сигналов, и вывода из ЭВМ информации, необходимой для автоматического управления технологическим процессом или элементами отображения и сигнализации. По назначению УСО делятся на устройства ввода и вывода информации, по характеру входных и выходных сигналов — на устройства ввода и вывода непрерывных (аналоговых) и дискретных сигналов. Устройства ввода аналоговой информации (УВАИ) (рис. 9.7) обеспечивают: ввод аналоговой информации от одного или нескольких датчиков (Д1—ДУУ) по линии связи (J1C) обычно в виде изменяющихся во времени значений постоянного тока или напряжения; аналого-цифровое преобразование этой информации, т.е. превращение аналогового сигнала в цифровой двоичный код, понятный ЭВМ; ввод цифровой информации в ЭВМ для дальнейшей обработки. Аналоговые сигналы, передаваемые от датчиков Д1 —Д/V, чувствительны к помехам, что требует принятия мер по их устранению, например, установки фильтров Ф. Для подключения к УВАИ нескольких датчиков обычно используют коммутатор, например, мультиплексор (МП), который поочередно подключает датчики к аналого-цифровому преобразователю (АЦП). Ослабленные сигналы усиливаются с помощью усилителей Ус.
Основными характеристиками УВАИ являются: диапазон изменения входных аналоговых сигналов; количество входных каналов, т.е. число подключаемых датчиков; время или скорость преобразования входных сигналов; число разрядов (бит) кода, выдаваемого в ЭВМ; погрешность преобразования АЦП. Устройства вывода аналоговой информации выполняют действия, обратные УВАИ, т.е. обеспечивают прием от ЭВМ и преобразование с помощью цифро-аналогового преобразователя (ЦАП) кодовых сигналов в аналоговые, которые используются для управления исполнительными механизмами, например, приводами выключателей или разъединителей. Выходные каналы при этом имеют гальваническую развязку с внешними цепями. Устройства вывода аналоговой информации имеют характеристики, аналогичные рассмотренным ранее для УВАИ. Устройства ввода дискретной информации (УВДИ) предназначены для ввода в ЭВМ двухпозиционных сигналов и параллельного кода от кодовых датчиков. Дискретные сигналы, поступающие от датчиков (Д1-ДЛ) (рис. 9.8) отличаются продолжительностью и важностью передаваемого сигнала. Так, например, датчик, контролирующий состояние коммутационного аппарата, может находиться в замкнутом или разомкнутом состоянии длительное время (часы, сутки и более). С другой стороны, датчики, фиксирующие аварийные режимы, например, устройство релейной защиты выдает сигнал, измеряемый десятками миллисекунд и требует немедленного реагирования. Имеются также датчики с большой частотой повторения сигналов, например, счетчики расхода электроэнергии, требующие не только фиксации появления сигнала, но и подсчета их числа, которое определяет расход электроэнергии. В зависимости от свойств сигнала применяют различные схемы ввода дискретных сигналов. Структурная схема ввода дискретных сигналов представлена на рис. 9.8. При замыкании контакта датчика (Д1-ДЛ0 источник напряжения (ИН) создает ток в цепи устройства для выравнивания уровней (ВУ), представляющего делитель напряжения, на выходе которого возникает сигнал. По линии связи (J1C) сигнал поступает на фильтр (Ф), который подавляет помехи. Пороговые элементы (ПЭ) не пропускают сигналы низкого уровня (помехи). С выхода ПЭ сигнал поступает на формирователь импульсного сигнала (ФИС), который через схему ИЛИ (1) переключает триггер прерывания (ТП). Запрос прерывания (ЗП) с выхода ТП поступает на шину управления (ШУ). Центральный процессор (ЦП) выдает адрес группы датчиков и сигнал ввода. Порт ввода-вывода опознает адрес всей группы и при наличии разрешения на ввод подает управляющий сигнал на схему И логического устройства (ЛУ). С его выхода сигнал поступает в буферный регистр порта ввода-вывода (ПВВ) и далее на шину данных (ШД). Буферный регистр позволяет фиксировать не только продолжительные, но и кратковременные (импульсные) сигналы датчиков. Число одновременно опрашиваемых датчиков обычно выбирается равным числу разрядов ЦП. Возможно выполнение ввода с индивидуальной проверкой каждого датчика. Вместо логического устройства устанавливается, например, при большом числе датчиков мультиплексор, управляемый контроллером ввода-вывода. Устройство ввода дискретной информации характеризуется числом и уровнем входных сигналов; временем опроса всех входных каналов; способом ввода сигналов в ЭВМ (пассивным или инициативным). Устройства вывода дискретной информации обеспечивают управление от ЭВМ различными двухпозиционными элементами, такими как сигнальные лампы, реле, а также устройствами с кодовым управлением. По принципу построения и основным характеристикам устройства вывода дискретной информации аналогичны УВДИ. Популярное:
|
Последнее изменение этой страницы: 2016-03-25; Просмотров: 1242; Нарушение авторского права страницы
 На рис. 9.5 показана наиболее распространенная схема микроЭВМ, имеющая три общие магистрали (на схеме показаны двойными линиями со стрелками), к которым под воздействием устройства управления поочередно подключаются входящие в МП узлы. Микропроцессор осуществляет обработку информации. Наиболее характерными узлами МП являются: арифметико-логическое устройство (АЛУ), составляющее основу операционного устройства, устройство управления, под воздействием которого к трем общим магистралям поочередно подключаются узлы, входящие в МП. Магистрали служат для обмена информацией между МП и остальными блоками микроЭВМ, в качестве которых на рис. 9.5 представлены блок памяти и устройство ввода-вывода.
На рис. 9.5 показана наиболее распространенная схема микроЭВМ, имеющая три общие магистрали (на схеме показаны двойными линиями со стрелками), к которым под воздействием устройства управления поочередно подключаются входящие в МП узлы. Микропроцессор осуществляет обработку информации. Наиболее характерными узлами МП являются: арифметико-логическое устройство (АЛУ), составляющее основу операционного устройства, устройство управления, под воздействием которого к трем общим магистралям поочередно подключаются узлы, входящие в МП. Магистрали служат для обмена информацией между МП и остальными блоками микроЭВМ, в качестве которых на рис. 9.5 представлены блок памяти и устройство ввода-вывода.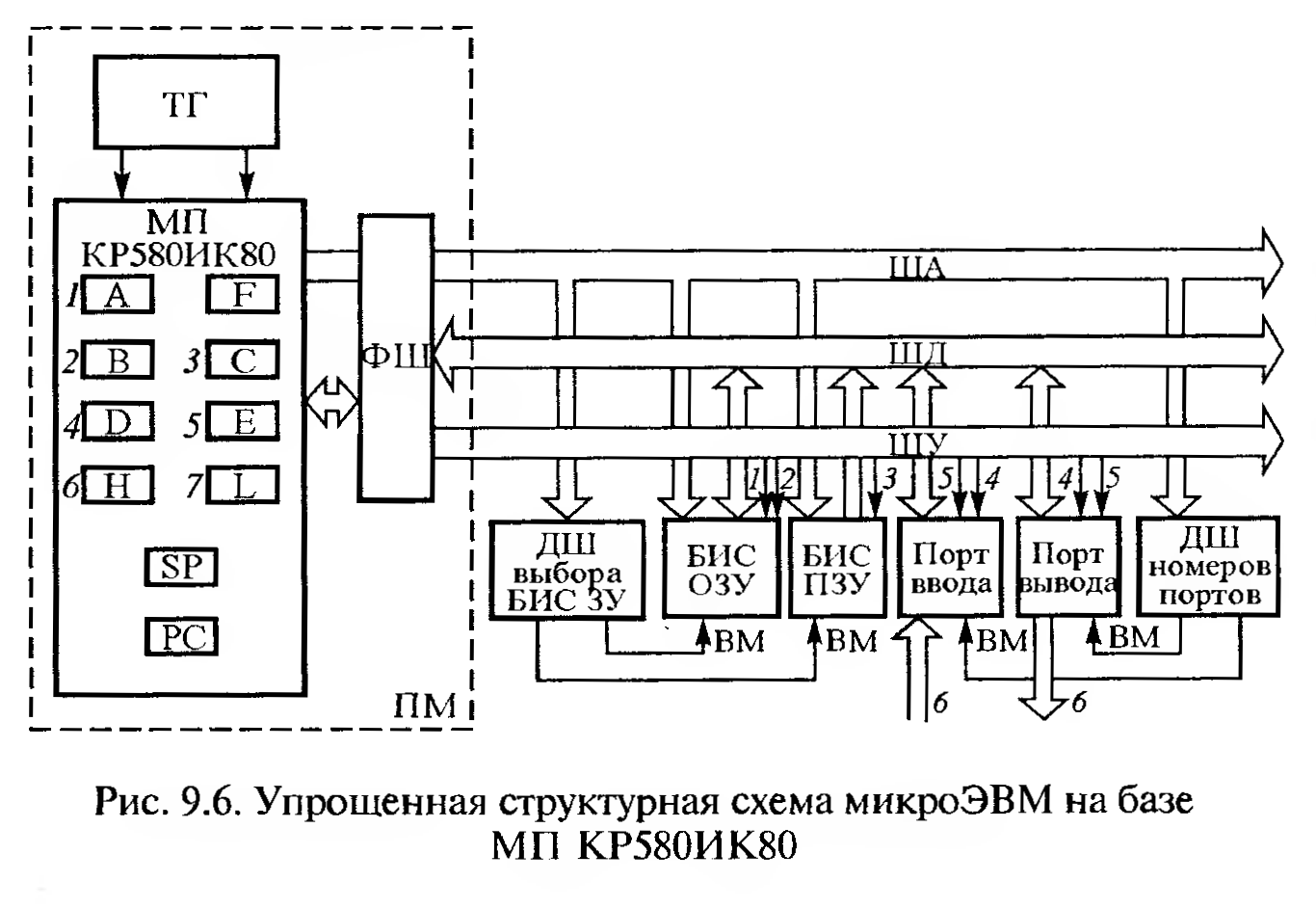 A, B, C, D, E, H, L, регистра признаков результата выполнения операции F и двух 16- разрядных регистров SP (указатель стека) и PC (счетчика команд).
A, B, C, D, E, H, L, регистра признаков результата выполнения операции F и двух 16- разрядных регистров SP (указатель стека) и PC (счетчика команд). тивном случае к шинам подключают порты последовательного ввода-вывода, содержащие преобразователи параллельного кода в последовательный и обратно. При этом максимальное расстояние между микропроцессорным устройством и контролируемым объектом определяется используемой системой передачи данных.
тивном случае к шинам подключают порты последовательного ввода-вывода, содержащие преобразователи параллельного кода в последовательный и обратно. При этом максимальное расстояние между микропроцессорным устройством и контролируемым объектом определяется используемой системой передачи данных.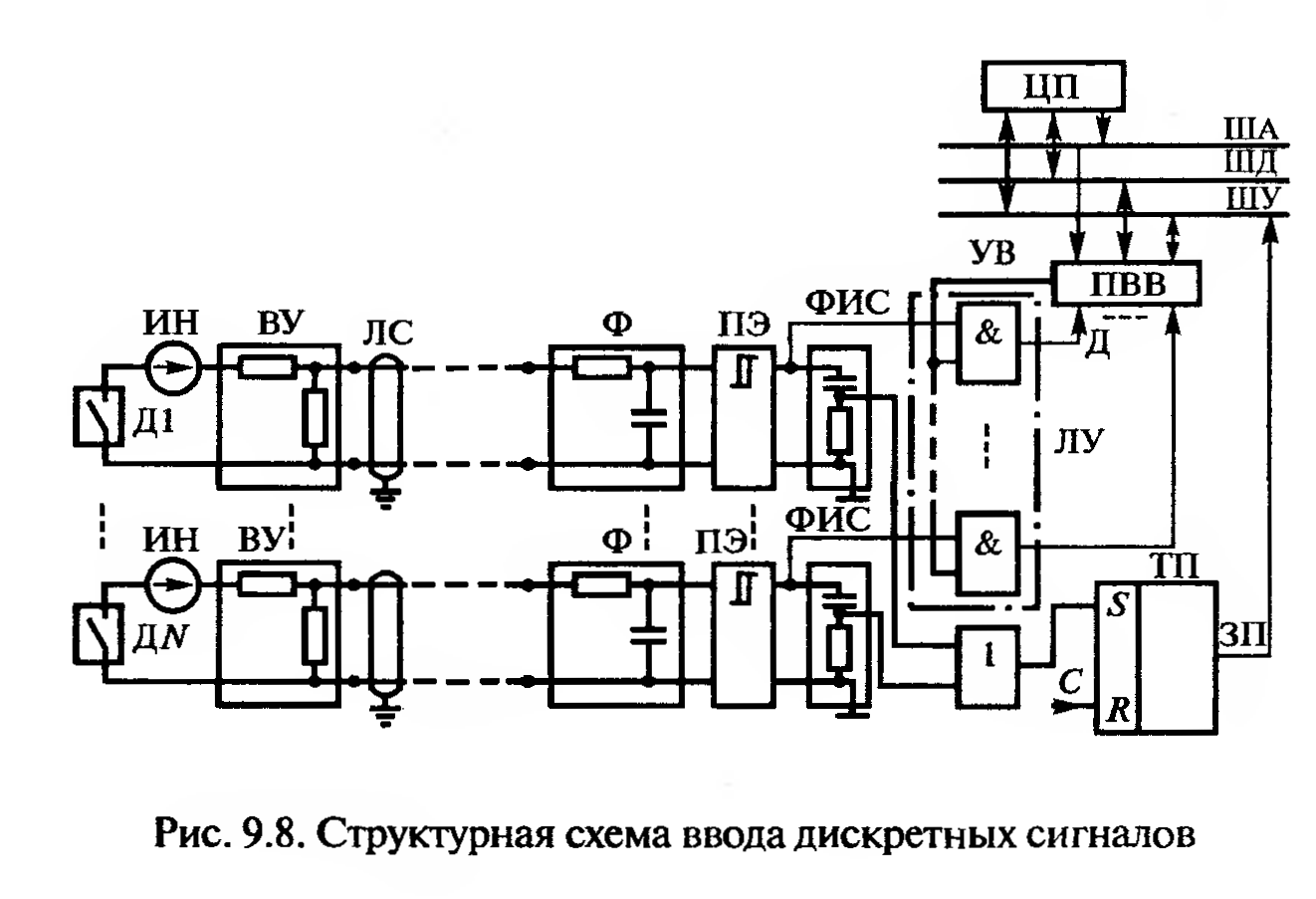 Выбор датчика (канала) осуществляет центральный процессор (ЦП), посылая по шине адрес ША, код адреса в порт ввода-вывода (ПВВ), где происходит выбор канала (ВК) и его подключение с помощью мультиплексора. Для правильного преобразования в цифровую форму быстро изменяющихся аналоговых сигналов устанавливают блок выборки запоминания (БВЗ). Этот блок выбирает исходный сигнал, который запоминается на время, необходимое для его полного преобразования АЦП. Выходной цифровой сигнал (ВЦС) с преобразователя АЦП поступает в ПВВ, который согласует его с сигналами шин данных (ШД) и управления (ШУ). ПВВ осуществляет управление вводом (УВ) информации из БВЗ в АЦП.
Выбор датчика (канала) осуществляет центральный процессор (ЦП), посылая по шине адрес ША, код адреса в порт ввода-вывода (ПВВ), где происходит выбор канала (ВК) и его подключение с помощью мультиплексора. Для правильного преобразования в цифровую форму быстро изменяющихся аналоговых сигналов устанавливают блок выборки запоминания (БВЗ). Этот блок выбирает исходный сигнал, который запоминается на время, необходимое для его полного преобразования АЦП. Выходной цифровой сигнал (ВЦС) с преобразователя АЦП поступает в ПВВ, который согласует его с сигналами шин данных (ШД) и управления (ШУ). ПВВ осуществляет управление вводом (УВ) информации из БВЗ в АЦП.