|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Прямое и обратное регулированиеСтр 1 из 3Следующая ⇒
Краткие сведения о приборе
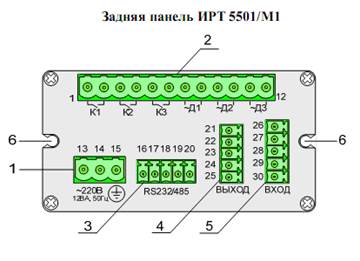
ИРТ предназначен для измерения, контроля и регулирования температуры и других неэлектрических величин, преобразованных в электрические сигналы силы, напряжения постоянного тока и активное сопротивление постоянному току. ИРТ является микропроцессорным переконфигурируемым потребителем прибором с индикацией текущих значений преобразуемых величин и предназначен для функционирования как в автономном режиме, так и совместно с другими приборами, объединенными в локальную компьютерную сеть. Просмотр и изменение параметров конфигурации ИРТ производится как с кнопочной клавиатуры, так и с помощью программы «Tune5500.exe» при подключении прибора к компьютеру. Связь прибора с компьютером осуществляется по интерфейсу RS 232 или RS 485. Индикация измеряемых величин в ИРТ происходит на основном светодиодном индикаторе (СД индикаторе). На дополнительном СД индикаторе отображается уставка регулятора или значение параметра конфигурации. ИРТ предназначен для работы с унифицированными входными электрическими сигналами в виде постоянного тока 0…5, 0…20 или 4…20 мА, с термопреобразователями сопротивления (ТС) и преобразователями термоэлектрическими(ТП), а также для измерения напряжения постоянного тока до 100 мВ и сопротивления постоянному току до 320 Ом. ИРТ осуществляет функцию регулирования с использованием пропорционально-интегрально-дифференциального закона (ПИД), пропорционально - дифференциально-дифференциального закона (ПДД) с возможностью вывода управляющего воздействия на любые реле или ПВИ. ИРТ обеспечивает автоматическую настройку ПИД и ПДД− регулирования для оптимальной настройки системы регулирования непосредственно на объекте. Время установления рабочего режима не более 30 мин. На лицевой панели прибора размещены элементы индикации и управления, на задней панели размещены клеммные колодки с разъемами. На рисунках 1 и 2 представлены соответственно передняя и задняя панели ИРТ.
Рисунок 1 Обозначения к рисунку: 1 – шкальный индикатор; 2 – основной индикатор; 3 – блок единичных индикаторов; 4 – дополнительный индикатор; 5, 6, 7 – кнопки управления.
Рисунок 2 Обозначения к рисунку: 1 – разъемная клеммная колодка для подключения питания; 2 – разъемная клеммная колодка для подключения трех релейных выходов («K1»– «K3») и трех дискретных входов («~Д1» – «~Д3»); 3 – разъемная клеммная колодка интерфейса RS 232/485; 4 – разъемная клеммная колодка выхода ПВИ и дополнительного дискретного входа; 5 – разъемная клеммная колодка для подключения первичных преобразователей; 6 – отверстие с внутренней резьбой для крепления к щиту. ИРТ состоит из следующих основных модулей: • модуль импульсного блока питания; • модуль индикации и клавиатуры; • модуль АЦП с гальванической развязкой; • модуль ПВИ с гальванической развязкой; • модуль интерфейсов RS 232/485 с гальванической развязкой; • блок реле; • блок дискретных входов с гальванической развязкой; • микропроцессорный блок управления.
Общие принципы работы ИРТ
Работа ИРТ происходит в циклическом режиме с периодом 0, 5 сек. За один цикл работы ИРТ производит одно измерение сигналов в аналоговом и четырех дискретных входных каналах. Полученные результаты анализируются микропроцессорным блоком управления и в зависимости от внутренних настроек прибора и текущего режима: • результат выполненного измерения отображается на основном индикаторе прибора; • для каждого из трех реле может быть сформирована команда на его включение/выключение ( «Связи реле с уставками и ошибкой измерений в канале»), которая может быть выполнена сразу, с задержкой на несколько циклов или отменена; • может быть сформирована команда на запуск/остановку процесса регулирования; • при запущенном процессе регулирования вырабатывается управляющий сигнал, который поступает на один или два релейных выхода; • на выходе ПВИ формируется сигнал, соответствующий текущему значению измеренной величины (или выходной мощности) в одном из диапазонов 0…5 мА, 0…20 мА или 4…20 мА. В начале каждого цикла измерений входной сигнал от первичного преобразователя поступает на универсальный измерительный вход и преобразуется модулем АЦП в цифровой код, который поступает в микропроцессорный блок управления для дальнейшей обработки, определяемой конфигурацией прибора. Дальнейшая обработка цифрового кода зависит от значений соответствующих параметров, установленных пользователем, и может включать следующие этапы, выполняемые в приведенной ниже последовательности: • преобразование цифрового кода в соответствии с НСХ первичного преобразователя; для входных унифицированных сигналов в виде силы или напряжения постоянного тока – линейное преобразование или преобразование, включающее функцию извлечения квадратного корня; • коррекция нуля и/или наклон характеристики для устранения начальной погрешности преобразования входных сигналов (описание параметров «SHFn» и «GAin»); • полиномиальное или кусочно-линейное преобразование в случае применения нестандартных первичных преобразователей; • усреднение для подавления колебаний показаний прибора при наличии повышенного уровня шумов, поступающих на измерительный вход (параметр «nSu»). Результатом всех этапов обработки является измеренное значение Aизм физической величины. На основном индикаторе прибора высвечивается значение величины Aизм, округленное до количества знаков, определяемых разрядностью индикатора и установленным значением параметра «PrcS». ИРТ имеет три независимых уставки, которые могут быть верхними и нижними и могут быть связаны с любым исполнительным реле. Команды на включение/выключение реле формируются в соответствии с установленными пользователем значениями параметров «rL1.1», «rL2.1» и «rL3.1» ( «Связи реле с уставками и ошибкой измерений в канале»). В процессах ПИД-/ПДД-регулирования измеренное значение Aизм сравнивается с уставкой процесса регулирования, в результате чего вычисляется величина сигнала управления объектом регулирования. Сигнал управления преобразуется алгоритмом ШИМ-модуляции в последовательность импульсов определенной длительности. Импульсы подаются на один (ПИД-/ручное регулирование) или два (ПДД-регулирование) из трех релейных выходов «К1», «К2», «К3», которые используются для управления работой исполнительного механизма. При ручном регулировании величина управляющего воздействия задается пользователем с помощью дискретных входов. Переключение с ручного управления на ПИД-регулирование и обратно может осуществляться пользователем через один из дискретных входов. Основные режимы ИРТ может находиться в одном из следующих режимов: • режим индикации измерений; • режим ввода паролей; • режим меню; • режим просмотра значений уставок и выходной мощности. На рисунке приведена схема взаимосвязей между режимами ИРТ.
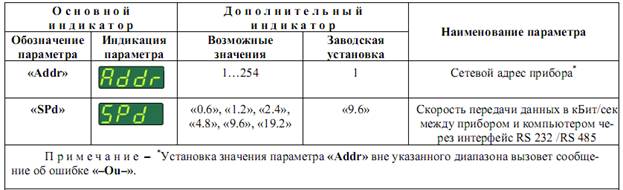
Рисунок 3 В режим индикации измерений прибор переходит после включения питания. На основном индикаторе отображается текущее значение измеренной величины, на дополнительном – установленное значение уставки процесса регулирования. В данном режиме прибор может находиться не зависимо от того, выполняется или нет какой-либо из процессов автонастройки, ПИД-/ПДД-/ручного регулирования. Режим ввода паролей Все внутренние настройки прибора могут быть выполнены в режиме меню, доступ в который защищен тремя паролями: пароль 1, пароль 2, пароль 3. Каждый из трех паролей вводится в режиме ввода паролей и защищает доступ к определенной группе параметров: • пароль 1 – доступ к изменению значений уставок и гистерезисов (раздел «Уставки»); • пароль 2 – доступ к изменению конфигурационных параметров (раздел «Конфигурация»); • пароль 3 – доступ к специальной функции прибора – «Сброс реле». Все три пароля представляют собой четырехзначные шестнадцатиричные числа, которые хранятся в энергонезависимой памяти прибора. Возможные значения: 0000…FFFF.
ПИД-регулирование Алгоритм ПИД-регулирования вырабатывает управляющее воздействие таким образом, чтобы измеренное значение стремилось к заданной уставке процесса регулирования Aуст, компенсируя тем самым внешние воздействия на объект регулирования. В процессе ПИД-регулирования на выходе прибора формируется управляющий (выходной) сигнал Y(t), действие которого направлено на уменьшение отклонения E(t) текущего значения Aизм измеряемой величины от значения Aуст:
где t– текущее значение времени; E(t) – разность между заданным Aуст и текущим Aизм значениями измеряемой величины; Kp – коэффициент пропорциональности, %/ед.изм; τ Д – постоянная времени дифференцирования, с; τ И – постоянная времени интегрирования, с. Эффективность процесса ПИД-регулирования (быстрый выход на уставку регулятора и устойчивое регулирование при значениях Aизм, близких к Aуст) зависит от правильности определения для конкретного объекта регулирования значений коэффициентов регулирования Kp, τ Д, τ И. Пользователь может установить эти коэффициенты самостоятельно, вводя значения параметров «rGPr», «rGti», «rGtd» в режиме меню, или они устанавливаются автоматически в результате запуска пользователем процесса ПИД-регулирования с предварительной автонастройкой.
ПДД-регулирование При ПДД-регулировании обрабатывается сигнал рассогласования E(t)=Aизм -Aуст. При запущенном процессе ПДД-регулирования на выходе прибора вырабатывается управляющий (выходной) сигнал Z(t), действие которого направлено на уменьшение отклонения E(t) текущего значения Aизм измеряемой величины от значения Aуст:
На основе выходного сигнала Z(t) регулятора формируется сигнал управления интегрирующим механизмом, представляющий собой величину изменения воздействия на объект регулирования. НАВИГАЦИЯ ПО МЕНЮ Просмотр и редактирование значений параметров, определяющих работу прибора, осуществляется в режиме меню. Измененное значение параметра сохраняется в энергонезависимой памяти прибора и вступает в действие сразу после окончания редактирования. При входе в режим меню процессы измерений в каналах не прекращаются так же, как и процессы автонастройки и регулирования (если они уже были запущены). Вход в режим меню возможен только из режима индикации измерений через режим ввода паролей после введения пароля 1, пароля 2 или пароля 3, обеспечивающих доступ к разделам «Уставки», «Конфигурирование» или «Сброс реле» соответственно. Выход из режима меню осуществляется одновременным нажатием комбинации кнопок « ↑ » и «↓ », прибор при этом переходит в режим индикации измерений.
Навигация по меню Вход в режим меню, просмотр и редактирование значений параметров, а также выход из режима меню осуществляются с помощью кнопок « → », «↑ » и «↓ », расположенных на лицевой панели прибора. В режиме меню (разделы «Уставки», «Конфигурирование») мнемоническое название параметра отображается на основном индикаторе, текущее значение параметра – на дополнительном. Для входа в раздел меню «Уставки» из режима индикации измерений, необходимо: • нажать кнопку «→ » на лицевой панели; • ввести пароль 1; • убедиться, что на основном индикаторе выведено «SEt1», а на дополнительном – установленное значение данного параметра. Неверный ввод пароля 1 возвращает прибор в режим индикации измерений. Для входа в раздел меню «Конфигурирование» из режима индикации измерений, необходимо: • нажать одновременно кнопки «↑ » и «↓ » и удерживать их в нажатом состоянии в течение 2 секунд; • ввести пароль 2; • убедиться, что на основном индикаторе выведено «Addr», а на дополнительном – установленное значение данного параметра. Чтобы войти в раздел режима меню «Сброс реле» из режима индикации измерений, необходимо: • нажать одновременно кнопки «↑ » и «↓ » и удерживать их в нажатом состоянии в течение 2 секунд; • ввести пароль 3; • убедиться, что на основном индикаторе выведено «CL», и через 2 секунды прибор перейдет в режим индикации измерений. В режиме меню на дополнительном индикаторе может отображаться: • десятичное число (целое или дробное); • упорядоченный набор символов, каждый из которых записывается в соответствующем разряде индикатора и выбирается из некоторого списка; • слово, для отображения которого используются разряды индикатора (все или часть из них), выбираемое из некоторого списка. Кнопки «↑ » и «↓ » используются для: • выбора нужного названия параметра из списка всех параметров раздела; • выбора нужного значения параметра из списка; • выбора нужного значения для каждого из разрядов параметра; • выхода из режима меню в режим индикации измерений. Кнопка «→ » используется для: • начала редактирования выбранного параметра (при этом все слово или 1-й разряд индикатора начинают мигать); • перехода к редактированию следующего разряда (при этом редактируемый разряд начинает мигать, а предыдущий – прекращает); • окончания редактирования значения параметра (при этом все разряды перестают мигать, и выбранное значение параметра вступает в силу). Для выхода из режима меню в режим индикации измерений, необходимо: • нажать одновременно кнопки «↑ » и «↓ ». Описание параметров раздела меню «Уставки »
Параметры «HYS1», «HYS2», «HYS3» определяют значения гистерезисов для уставок 1, 2, 3 соответственно. Граница зоны гистерезиса (зоны возврата) для «нижней» уставки определяется сложением значений уставки SEt и гистерезиса HYS, для «верхней» – вычитанием значения гистерезиса из значения уставки. Уставка срабатывает при достижении результатом измерений Aизм установленного значения уставки, и сбрасывается – при выходе измеряемой величины из зоны гистерезиса согласно диаграмме, представленной на рисунке.
Рисунок 5 Параметры связи Параметры реле Параметры дискретных входов Раздел меню «Сброс реле»
Процедура, осуществляемая в разделе меню «Сброс реле», предназначена для выключения тех реле, которые в процессе работы прибора не могут быть сброшены автоматически. Процедура распространяется только на те реле, которые не задействованы в процессе регулирования. Выполнение данной процедуры осуществляется из режима индикации измерений после ввода пароля 3. При правильном вводе пароля 3 на основном индикаторе высветится «CL», и через 2 секунды прибор перейдет в режим индикации измерений. Результатом выполнения процедуры будут описанные ниже действия: • если измеряемая величина находится в зоне гистерезиса какой-либо из сработавших уставок, то эта уставка переводится в состояние «сброшена» согласно диаграмме, представленной на рисунке; признак изменения состояния реле формируется с учетом нового состояния уставки;
Рисунок 6 • если сформированный признак изменения состояния реле (см. п. 2.6.6.2) оказался равным -1 (не менять состояние реле), то он изменяется на 0 (выключить реле); • команда на срабатывание каждого из реле формируется с учетом установленных связей его с уставками и ошибкой измерений.
Сообщения об ошибках Работа с графиком Рисунок 15 1 – в дереве приборов синим цветом выделено, к какому регулятору относится график; 2 – кнопки позволяющие смещать график в окне построения; 3 – кнопки изменения масштаба графика; 4 – кнопка восстанавливающая режим автоматического выбора масштаба графика; 5 – кнопка очистки графика; 6 – кнопка печати графика; 7 – меню выбора единиц измерения по оси времени (часы или минуты); 8 – возможность привязки последней точки к правой границе области построения графика при отключенном автоматическом масштабировании; 9 – меню выбора цвета графика; 10 – область построения графика. На данной вкладке находятся кнопки смещения графика влево/вниз/вверх/вправо, растяжения/сжатия графика. Кнопкой “Восстановить” осуществляется масштабирование графика таким образом, чтобы все его отсчёты уместились в видимой области. Кнопкой “Очистить” осуществляется очистка графика данного регулятора. “Время по Х” - в этом поле задаётся размерность (минуты или часы) оси Х графика конкретного регулятора. Галочка “Автообновление” - если он включён, то во всех режимах осуществляется масштабирование правой (--> ) границы графика так, чтобы всегда была видна последняя (по Х) точка графика. Также есть возможность изменить цвет графика. Печать графика осуществляется кнопкой “Печать”. “Приближение” отдельного участка осуществляется выделением нужной области мышкой в окне вывода графика.
ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ В данной лабораторной установке используется регулирование с помощью нагревателя
Рисунок 16
1. Включите два левых тумблера на щитке. 2. Включите автомат №3. 3. Выполнить конфигурацию параметров регулятора ИРТ 5501, используя указания п.2.
Краткие сведения о приборе
ИРТ предназначен для измерения, контроля и регулирования температуры и других неэлектрических величин, преобразованных в электрические сигналы силы, напряжения постоянного тока и активное сопротивление постоянному току. ИРТ является микропроцессорным переконфигурируемым потребителем прибором с индикацией текущих значений преобразуемых величин и предназначен для функционирования как в автономном режиме, так и совместно с другими приборами, объединенными в локальную компьютерную сеть. Просмотр и изменение параметров конфигурации ИРТ производится как с кнопочной клавиатуры, так и с помощью программы «Tune5500.exe» при подключении прибора к компьютеру. Связь прибора с компьютером осуществляется по интерфейсу RS 232 или RS 485. Индикация измеряемых величин в ИРТ происходит на основном светодиодном индикаторе (СД индикаторе). На дополнительном СД индикаторе отображается уставка регулятора или значение параметра конфигурации. ИРТ предназначен для работы с унифицированными входными электрическими сигналами в виде постоянного тока 0…5, 0…20 или 4…20 мА, с термопреобразователями сопротивления (ТС) и преобразователями термоэлектрическими(ТП), а также для измерения напряжения постоянного тока до 100 мВ и сопротивления постоянному току до 320 Ом. ИРТ осуществляет функцию регулирования с использованием пропорционально-интегрально-дифференциального закона (ПИД), пропорционально - дифференциально-дифференциального закона (ПДД) с возможностью вывода управляющего воздействия на любые реле или ПВИ. ИРТ обеспечивает автоматическую настройку ПИД и ПДД− регулирования для оптимальной настройки системы регулирования непосредственно на объекте. Время установления рабочего режима не более 30 мин. На лицевой панели прибора размещены элементы индикации и управления, на задней панели размещены клеммные колодки с разъемами. На рисунках 1 и 2 представлены соответственно передняя и задняя панели ИРТ.
Рисунок 1 Обозначения к рисунку: 1 – шкальный индикатор; 2 – основной индикатор; 3 – блок единичных индикаторов; 4 – дополнительный индикатор; 5, 6, 7 – кнопки управления.
Рисунок 2 Обозначения к рисунку: 1 – разъемная клеммная колодка для подключения питания; 2 – разъемная клеммная колодка для подключения трех релейных выходов («K1»– «K3») и трех дискретных входов («~Д1» – «~Д3»); 3 – разъемная клеммная колодка интерфейса RS 232/485; 4 – разъемная клеммная колодка выхода ПВИ и дополнительного дискретного входа; 5 – разъемная клеммная колодка для подключения первичных преобразователей; 6 – отверстие с внутренней резьбой для крепления к щиту. ИРТ состоит из следующих основных модулей: • модуль импульсного блока питания; • модуль индикации и клавиатуры; • модуль АЦП с гальванической развязкой; • модуль ПВИ с гальванической развязкой; • модуль интерфейсов RS 232/485 с гальванической развязкой; • блок реле; • блок дискретных входов с гальванической развязкой; • микропроцессорный блок управления.
Общие принципы работы ИРТ
Работа ИРТ происходит в циклическом режиме с периодом 0, 5 сек. За один цикл работы ИРТ производит одно измерение сигналов в аналоговом и четырех дискретных входных каналах. Полученные результаты анализируются микропроцессорным блоком управления и в зависимости от внутренних настроек прибора и текущего режима: • результат выполненного измерения отображается на основном индикаторе прибора; • для каждого из трех реле может быть сформирована команда на его включение/выключение ( «Связи реле с уставками и ошибкой измерений в канале»), которая может быть выполнена сразу, с задержкой на несколько циклов или отменена; • может быть сформирована команда на запуск/остановку процесса регулирования; • при запущенном процессе регулирования вырабатывается управляющий сигнал, который поступает на один или два релейных выхода; • на выходе ПВИ формируется сигнал, соответствующий текущему значению измеренной величины (или выходной мощности) в одном из диапазонов 0…5 мА, 0…20 мА или 4…20 мА. В начале каждого цикла измерений входной сигнал от первичного преобразователя поступает на универсальный измерительный вход и преобразуется модулем АЦП в цифровой код, который поступает в микропроцессорный блок управления для дальнейшей обработки, определяемой конфигурацией прибора. Дальнейшая обработка цифрового кода зависит от значений соответствующих параметров, установленных пользователем, и может включать следующие этапы, выполняемые в приведенной ниже последовательности: • преобразование цифрового кода в соответствии с НСХ первичного преобразователя; для входных унифицированных сигналов в виде силы или напряжения постоянного тока – линейное преобразование или преобразование, включающее функцию извлечения квадратного корня; • коррекция нуля и/или наклон характеристики для устранения начальной погрешности преобразования входных сигналов (описание параметров «SHFn» и «GAin»); • полиномиальное или кусочно-линейное преобразование в случае применения нестандартных первичных преобразователей; • усреднение для подавления колебаний показаний прибора при наличии повышенного уровня шумов, поступающих на измерительный вход (параметр «nSu»). Результатом всех этапов обработки является измеренное значение Aизм физической величины. На основном индикаторе прибора высвечивается значение величины Aизм, округленное до количества знаков, определяемых разрядностью индикатора и установленным значением параметра «PrcS». ИРТ имеет три независимых уставки, которые могут быть верхними и нижними и могут быть связаны с любым исполнительным реле. Команды на включение/выключение реле формируются в соответствии с установленными пользователем значениями параметров «rL1.1», «rL2.1» и «rL3.1» ( «Связи реле с уставками и ошибкой измерений в канале»). В процессах ПИД-/ПДД-регулирования измеренное значение Aизм сравнивается с уставкой процесса регулирования, в результате чего вычисляется величина сигнала управления объектом регулирования. Сигнал управления преобразуется алгоритмом ШИМ-модуляции в последовательность импульсов определенной длительности. Импульсы подаются на один (ПИД-/ручное регулирование) или два (ПДД-регулирование) из трех релейных выходов «К1», «К2», «К3», которые используются для управления работой исполнительного механизма. При ручном регулировании величина управляющего воздействия задается пользователем с помощью дискретных входов. Переключение с ручного управления на ПИД-регулирование и обратно может осуществляться пользователем через один из дискретных входов. Основные режимы ИРТ может находиться в одном из следующих режимов: • режим индикации измерений; • режим ввода паролей; • режим меню; • режим просмотра значений уставок и выходной мощности. На рисунке приведена схема взаимосвязей между режимами ИРТ.
Рисунок 3 В режим индикации измерений прибор переходит после включения питания. На основном индикаторе отображается текущее значение измеренной величины, на дополнительном – установленное значение уставки процесса регулирования. В данном режиме прибор может находиться не зависимо от того, выполняется или нет какой-либо из процессов автонастройки, ПИД-/ПДД-/ручного регулирования. Режим ввода паролей Все внутренние настройки прибора могут быть выполнены в режиме меню, доступ в который защищен тремя паролями: пароль 1, пароль 2, пароль 3. Каждый из трех паролей вводится в режиме ввода паролей и защищает доступ к определенной группе параметров: • пароль 1 – доступ к изменению значений уставок и гистерезисов (раздел «Уставки»); • пароль 2 – доступ к изменению конфигурационных параметров (раздел «Конфигурация»); • пароль 3 – доступ к специальной функции прибора – «Сброс реле». Все три пароля представляют собой четырехзначные шестнадцатиричные числа, которые хранятся в энергонезависимой памяти прибора. Возможные значения: 0000…FFFF.
ПИД-регулирование Алгоритм ПИД-регулирования вырабатывает управляющее воздействие таким образом, чтобы измеренное значение стремилось к заданной уставке процесса регулирования Aуст, компенсируя тем самым внешние воздействия на объект регулирования. В процессе ПИД-регулирования на выходе прибора формируется управляющий (выходной) сигнал Y(t), действие которого направлено на уменьшение отклонения E(t) текущего значения Aизм измеряемой величины от значения Aуст:
где t– текущее значение времени; E(t) – разность между заданным Aуст и текущим Aизм значениями измеряемой величины; Kp – коэффициент пропорциональности, %/ед.изм; τ Д – постоянная времени дифференцирования, с; τ И – постоянная времени интегрирования, с. Эффективность процесса ПИД-регулирования (быстрый выход на уставку регулятора и устойчивое регулирование при значениях Aизм, близких к Aуст) зависит от правильности определения для конкретного объекта регулирования значений коэффициентов регулирования Kp, τ Д, τ И. Пользователь может установить эти коэффициенты самостоятельно, вводя значения параметров «rGPr», «rGti», «rGtd» в режиме меню, или они устанавливаются автоматически в результате запуска пользователем процесса ПИД-регулирования с предварительной автонастройкой.
Прямое и обратное регулирование При регулировании пользователь выбирает один из методов управления объектом: прямое или обратное. При прямом управлении значение выходного сигнала Y(t) увеличивается с увеличением значения измеряемой величины (холодильник). При обратном управлении значение выходного сигнала уменьшается с увеличением значения измеряемой величины (нагреватель).
Популярное:
|
Последнее изменение этой страницы: 2016-03-26; Просмотров: 1543; Нарушение авторского права страницы