
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Графические обозначения синхронных машин
Стандартом установлены упрощенный и развернутый способы обозначения синхронных машин (рис. 3.21). В упрощенных обозначениях обмотки статора и ротора изображаются в виде окружности с указанием выводов.
Рис. 3.21 Рис. 3.22
Рис. 3.23 Рис. 3.24 В развернутых обозначениях обмотку статора изображают цепочкой полуокружностей, а обмотку ротора — окружностью (рис. 3.22). Явнополюсный ротор обозначают пунктирной окружностью. Знаками На рис. 3.23 показано графическое обозначение трехфазной синхронной машины с вращающимся выпрямителем. Обмотка статора этой машины соединена звездой с нейтральным проводом. На рис. 3.24 приведено графическое обозначение синхронной машины, которая возбуждается постоянными магнитами. Катушки обмотки статора этой машины соединены звездой. Синхронные микромашины Синхронные микромашины, как и обычные синхронные машины, имеют ту особенность, что частота вращения n1=n2жестко связана с частотой сети питания f1. Поэтому синхронные двигатели используются в основном в устройствах, где нужно поддерживать постоянную скорость вращения (в часовых и программных механизмах, радиоприборах, лентопротяжных механизмах приборов, кинооборудовании). Кроме того, синхронные генераторы дают возможность индуцировать ЭДС повышенной частоты и измерять скорость вращения вала. Синхронные микромашины можно классифицировать таким образом: · синхронные микродвигатели с постоянными магнитами; · реактивные двигатели; · индукторные машины; · шаговые двигатели; · синхронные тахогенераторы. Синхронные микродвигатели с постоянными магнитами. В синхронных микродвигателях ротор имеет постоянные магниты и пусковую короткозамкнутую обмоткутипа «беличье колесо». Пуск такого двигателя осуществляется простым включением в сеть. Во время пуска до входа двигателя в синхронизм машина работает в асинхронном режиме. Ротор создает два момента: асинхронный; тормозной. Обычный асинхронный момент (Ma) создается «беличьей клеткой» (рис. 3.25). Постоянные магниты на роторе создают тормозной момент. Этот момент отсутствует в обычных синхронных двигателях, так как во время пуска обмотка возбуждения отключается от источника постоянного тока.
Рис. 3.25 Рис. 3. 26 Постоянные магниты создают тем больший тормозной момент, чем большей является степень возбуждения этих магнитов (рис. 3.26). Момент, который разгоняет ротор, — результирующий: Например, при моменте на валу М1кривая 2 (когда высока степень возбуждения постоянных магнитов) не обеспечивает синхронного вращения вала. И только уменьшение возбуждения дает возможность войти в синхронизм.
Рис. 3.27
Двигатели с постоянными магнитами по сравнению с другими типами синхронных машин имеют более высокие КПД и коэффициент мощности, стабильность скорости вращения. Но они потребляют большой пусковой ток, что имеет значение при работе от полупроводниковых преобразователей. Реактивный синхронный микродвигатель. Синхронный двигатель с явнополюсным ротором без обмотки возбуждения и постоянных магнитов, у которого магнитный поток создается реактивным током, проходящим по обмотке статора. Вращающий момент в таком двигателе возникает из – за различия магнитных проводимостей по продольной и поперечной осям. При этом явновыраженные полюсы ротора стремятся ориентироваться относительно поля так, чтобы магнитное сопротивление для силовых линий поля было минимальным. Вследствие этого появляются тангенциальные силы, образующие вращающий момент, и ротор вращается в том же направлении и стой же частотой вращения n1, что и поле статора. Обмотка статора в двигателях общего применения распределенная, трех- или двухфазная с конденсатором в одной из фаз; она создает вращающееся магнитное поле. Ротор современного двигателя собирают из стальных листов аналогично роторам асинхронных двигателей; листы имеют впадины, которые заливают алюминием. Основное достоинство таких двигателей – простота конструкции. Существенные недостатки – низкий коэффициент мощности (соs φ = 0, 5) и плохие пусковые свойства. Гистерезисным синхронным микродвигателем называется машина, вращающий момент которой создается благодаря явлению магнитного запаздывания при перемагничивании ротора. Статор такого двигателя имеет обычную конструкцию с полюсами, создающими вращающееся магнитное поле. Основным материалом ротора является магнитотвердый ферромагнетик. Этот материал имеет очень широкую петлю гистерезиса. Под действием магнитного поля статора ротор намагничивается, но из-за явления гистерезиса ось намагничивания отстает от оси вращающегося магнитного поля. Благодаря углу рассогласования и возникает гистерезисный момент. Если момент сопротивления на валу будет больше гистерезисного, то двигатель не будет работать в синхронном режиме. Чем шире петля гистерезиса, тем больше гистерезисный момент. Преимущества гистерезисных микродвигателей - это простота конструкции и надежность в работе, высокий КПД (55...65%), малый пусковой ток. Но стоимость машины значительно повышается из-за дорогих ферромагнетиков. Коэффициент мощности гистерезисных микродвигателей не превышает 0, 5. Индукторные машины. В электрических машинах наблюдается явление зубчатых колебаний, т. е. неустойчивость значений электрических величин (тока, напряжения, ЭДС) вследствие того, что ротор барабанного типа выполнен зубчатым. Это, конечно, нежелательное явление. Но в индукторных машинахспециальная конструкция ротора дает возможность генерировать ЭДС повышенной частоты. Статор индукторного синхронного генератора имеет обмотку возбуждения и обмотку якоря, в которой индуцируется переменная ЭДС. Ротор выполняется без обмотки с большим количеством зубцов. Он вращается внешней силой, и из-за наличия зубцов поток обмотки возбуждения превращается в пульсирующий. Этот поток пронизывает обмотку якоря и наводит ЭДС, частота которой полностью определяется скоростью вращения ротора и количеством зубцов
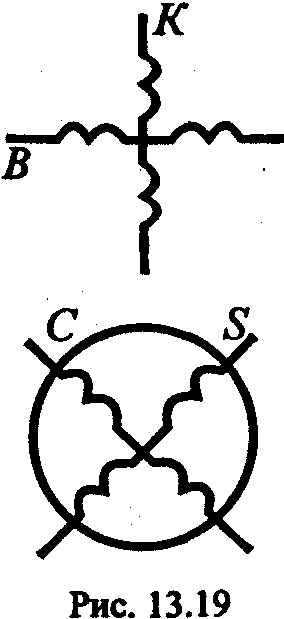
где f1 — частота ЭДС генератора; z2 — количество зубцов ротора; n2 — скорость вращения ротора. Индукторные генераторы имеют низкий КПД (до 0, 5) из-за больших дополнительных потерь в стали, связанных с высокой частотой перемагничивания. Шаговые синхронные двигатели дают возможность преобразовывать импульсы электрической величины в пульсирующее движение ротора. Статор шагового двигателя имеет явные полюсы с обмотками управления. Ротор бывает нескольких типов. Достаточно распространен ротор с постоянными магнитами. На обмотки управления подают импульсы напряжения от коммутатора. Обмотки создают поле, которое скачками изменяет свою ориентацию по отношению к импульсам источника. Ротор ориентируется синхронным моментом в соответствии с полем статора также скачками. Шаговые синхронные микродвигатели распространены в цифровой вычислительной технике и приборах управления. Информационные микромашины Информационные электрические микромашины предназначены для преобразования угла поворота, угловой скорости или ускорения в электрический сигнал. К информационным микромашинам можно отнести: поворотные трансформаторы; сельсины. Поворотные трансформаторы относятся к электрическим машинам переменного тока. Поворотные трансформаторы изготовляются для частоты тока 400 Гц и выше. Поворотный трансформатор — это такая машина, которая преобразует угол поворота вала в напряжение, пропорциональное этому углу либо его функции (косинусу или синусу). Поворотные трансформаторы распространены в автоматических и вычислительных устройствах, в системах автоматического регулирования для измерения рассогласования. Они также используются в устройствах для решения геометрических и тригонометрических задач, связанных с построением треугольников, преобразованием координат и т. п. Конструкция поворотных трансформаторов позволяет использовать несколько схем их включения. В зависимости от схемы включения различаются несколько режимов работы поворотных трансформаторов: а) синусно-косинусные поворотные трансформаторы обеспечивают напряжение, на одной выходной обмотке пропорциональное синусу, а на другой — пропорциональное косинусу угла поворота; б) линейный поворотный трансформатор обеспечивает выходное напряжение, пропорциональное углу поворота вала; в) построитель—это поворотный трансформатор, на две входные обмотки которого подаются сигналы, пропорциональные составляющим вектора в прямоугольных координатах, а на выходе снимаются напряжение и угол, которые характеризуют его модуль и аргумент; г) масштабные поворотные трансформаторы на выходе выдают напряжение, пропорциональное входному, а коэффициент пропорциональности определяется углом поворота. По конструкции скользящего контакта поворотные трансформаторы могут быть контактные и бесконтактные. Контактные поворотные трансформаторы имеют контактные кольца на роторе, аналогичные кольцам асинхронного двигателя с фазным ротором. В бесконтактных поворотных трансформаторах напряжение с обмоток ротора снимается либо с помощью спиральных пружин, либо магнитной связью. Поворотный трансформатор состоит из статора и ротора. Статор имеет сердечник из материала, обладающего малым магнитным сопротивлением (или шихтованный сердечник из электротехнической стали либо из пермаллоя). Статор имеет две взаимноперпендикулярные обмотки. Ротор также имеет ферромагнитный сердечник и две взаимноперпендикулярные обмотки (рис. 3.28).
Рис. 3.28 Рис. 3.29 В любом случае обмотка возбуждения статора В включается в сеть переменного тока и индуцирует в машине магнитный поток. Этот поток, в свою очередь, индуцирует ЭДС в обмотках ротора. Частота этой ЭДС равна частоте тока в сети, а действующее значение зависит от расположения ротора относительно статора. Если использовать как рабочую обмотку S ротора (синусную), то ЭДС этой обмотки будет пропорциональна синусу угла поворота вала. Такой поворотный трансформатор называется синусным. Если за рабочую взять обмотку С ротора (косинусную), то ЭДС этой обмотки будет пропорциональна косинусу угла поворота вала. Это — косинусный поворотный трансформатор. При использовании обоих обмоток ротора (в пределах коэффициента трансформации к = 0, 52...0, 56) можно получить линейную зависимость выходного напряжения от угла поворота вала. Такой поворотный трансформатор называется линейным. В обмотках ротора поворотного трансформатора протекает ток, т. е. имеет место явление реакции ротора. Компенсация этой реакции называется симметрированием поворотного трансформатора. Симметрирование дает возможность значительно уменьшить погрешности трансформатора. Симметрирование бывает: первичное (со стороны статора) и вторичное (со стороны ротора). Первичное симметрирование состоит в том, что обмотка статора К (компенсационная) включается на сопротивление ZК или накоротко. Нагрузка включается на одну обмотку ротора (синусную или косинусную). При вторичном симметрировании (например, линейного поворотного трансформатора) компенсационная обмотка и обмотка синуса соединяются последовательно и включаются на нагрузку Z1. Напряжение на этом сопротивлении является выходным напряжением трансформатора. Сопротивление нагрузки косинусной обмотки Z2 подбирается из условия постоянного выходного сопротивления. Схема линейного поворотного трансформатора с вторичным симметрированием приведена на рис. 3.29. Трансформатор-построитель используют для определения гипотенузы прямоугольного треугольника по двум катетам, для преобразования координат из прямоугольной системы в полярную и др. Масштабные поворотные трансформаторы применяют для согласования масштабов отдельных узлов схем. Сельсины. Электрические микромашины синхронной связи называются сельсинами. Сельсины обеспечивают синхронный и синфазный поворот или вращение двух или нескольких осей, не связанных механически между собой. В простейшем случае синхронная связь осуществляется с помощью двух сельсинов, связанных между собой электрически. Сельсин, механически соединенный с ведущей осью, называется датчиком. Второй сельсин соединяется с ведомой осью и называется приемником. При повороте ротора сельсина-датчика на угол Системы синхронной связи обеспечивают: · синхронность поворота (передача угла); · синхронность вращения (электрический вал). Различают два режима работы сельсинов: индикаторный и трансформаторный. В индикаторном режиме сельсин-датчик задает угол поворота. У сельсина-приемника нет момента сопротивления на валу, он имеет обычно только индикаторную стрелку. Между сельсинами есть лишь электрическая связь. Стрелка отклоняется на угол, отвечающий углу В трансформаторном режиме на вал сельсина-приемника действует момент сопротивления, т. е. ротор приемника поворачивает какой-то механизм. В этом случае сигнал рассогласования усиливается и подается на исполнительный механизм. Сельсины по количеству фаз бывают однофазные и трехфазные. По конструкции контактов сельсины разделяются на две группы – контактные и бесконтактные. Работа контактных сельсинов в системах синхронной связи принципиально не отличается от работы бесконтактных сельсинов. Устройство сельсина напоминает конструкцию асинхронного двигателя с фазным ротором. Сельсин имеет статор и ротор. Две обмотки (возбуждения и синхронизации) могут располагаться как на статоре, так и на роторе. Обмотка возбуждения всегда включается в сеть переменного тока и создает пульсирующий магнитный поток. Обмотку синхронизации всегда выполняют из трех катушек, соединенных звездой. Если обмотка возбуждения расположена на роторе, то сельсин имеет два контактных кольца. Если на роторе находится обмотка синхронизации, то у сельсина три контактных кольца. Некоторые сельсины имеют короткозамкнутую демпферную обмотку или механические демпферы.
Популярное:
|
Последнее изменение этой страницы: 2016-03-25; Просмотров: 2035; Нарушение авторского права страницы




 и Y указывают способ соединения статорной обмотки (рис. 3.21, 3.23).
и Y указывают способ соединения статорной обмотки (рис. 3.21, 3.23).

 . На результирующей механической характеристике появляются провалы, которые ухудшают условия пуска (рис. 3.27).
. На результирующей механической характеристике появляются провалы, которые ухудшают условия пуска (рис. 3.27).
 ,
, 

 ротор сельсина-приемника должен повернуться на такой же угол
ротор сельсина-приемника должен повернуться на такой же угол  т. е. система стремится ликвидировать рассогласование между положением роторов датчика и приемника, которое характеризуется углом рассогласования
т. е. система стремится ликвидировать рассогласование между положением роторов датчика и приемника, которое характеризуется углом рассогласования  . В идеальном случае система обеспечивает
. В идеальном случае система обеспечивает  .
. .
.