
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Непрерывные регуляторы. П иИ регуляторы.
Пропорциональный регулятор (П-регулятор) – положение регулирующего органа пропорционально величине отклонения Δ х регулируемой переменной от заданного значения хзад. u = -Kn * Δ x, где Кn – коэффициент передачи регулятора; «-» - обозначает, что входной сигнал Δ х приводит к изменению и в обратном направлении.
Достоинства: 1. быстродействие – малое время переходного процесса; 2. высокая устойчивость процесса регулирования. Недостатки: наличие остаточного отклонения регулируемой величины, т.е. невысокая точность. Интегральный регулятор (И-регулятор) – скорость перемещения регулирующего органа пропорциональна величине отклонения регулирующей переменной от заданного значения.
Достоинства: высокая точность (практические отсутствует статическая ошибка). Недостаток: процесс регулирования затянут. Используется для объектов управления с большой постоянной времени t и малым временем запаздывания τ. 23. Непрерывные регуляторы. ПИ и ПИД регуляторы ПИ-регуляторыПри отклонении регулируемой переменной от заданного значения в начале перемещают регулирующий орган пропорционально отклонению (как П-регулятор), а затем при приближении регулир. величины U и заданном значению медленно доводит ее до этого значения (как И-регулятор) U= -kn [∆ x+1/Tи Кn, Tи- параметры настройки регулятора Wпи(p)= − kn(1+1/Tиp)
Если t=0 то ∆ x → ∞ 1/Tи ПИД-регуляторы. (пропорционально интегрально дифференциальный)Пропорциональный регулятор с предворением. Регулирующий орган перемещают пропорционально отклонению ∆ x и скорости отклонения
Tn– время предварения
24. Классификация измерительных приборов. Средства автомат.контроля классиф.: - по выполняемым задачам а) сис-ма авт. контроля, б) сис-ма авт. управления в) комбинированная - по метрологич. значению: а) рабочие (технич. и лабораторн.) б) контрольные в) образцовые г) эталонные - по способу отсчета показаний: а) с ручной наводкой б) регистрирующие в) комбинированные г) интегрирующие - по характеру контрол. параметра а) общепромышленные б) специфические
Метролог.харак-ки измерит. приборов и устройств. Осн. требования к изм. прибору: - точность и формирование полезного сигнала с миним. искажением. Это зависит от статических и динамических характеристик и об влиянии возмущ. переменных. Статическая хар-ка измер. прибора - это функциональная связь между изменением вход. сигналаxи выходн. сигнала у. У=f(x)y
А и Б - непрерывная статич. хар-ки Чувствительность-отношение изменение вход.вел-ныY к соответственно изменению вход. величины X. 1 - линейная характеристика, поэтому чувствительность 2 - нелинейная, поэтому чувствительность будет различной и зависит от крутизны данной характеристики.
В - дискретная стат. хар-ка
Датчики, статическая характеристика которого непрерывна называются датчиками непрерывного действия или функциональными. Если статическая характеристика описывается следующей функцией Динамическая характеристика - зависимость Y от времени при скачкообразном изменении входной величины x. y=f(t) при x=const Динамич. хар-ки – это функц. зав-тьизнения показания прибора от времени при однократ. макс. изменении измер. величины. Динамич. погрешность – разность между показаниями измерит прибора и действит значением измер. величины взятой во времени переход.процесса.
1 – экспонинциальные. 2 - колебательный затухающий процесс.
25. Устойчивость САУ. Чтобы САУ нормально работала она должна быть устойчивая. Устойчивость САУ – способность возвращаться к установившемуся положению (установленное значение регулируемой величины после прекращения действия возмущения которое вывело её из данного установившегося положения). Для оценки устойчивости работы АСР применяют 1) Алгебраический критерий Гурвиц и Раус. 2)Частотные критерии Найквиста и Михайлова Критерий Михайлова. Для устойч. САУ n-го порядка необх. чтобы гадограф Михайлова при измен частот от нуля до бесконечности, начинал с (0< w< бескон-ти) положит.веществ. оси Re(w) обошел послед-но против час. стрелки n-квадрантов комплексной площади Анализ проводят след. Образом: -в хар-ном управлении заменяют Pна G(w) -выделяют вещественную и мнимую части -задаваясь w> 0но бесконечность< w, строят на комплексной полоскостигадограф Михайлова, получается
Популярное: |
Последнее изменение этой страницы: 2016-04-10; Просмотров: 1273; Нарушение авторского права страницы
 ;
; 


 , где Tu – параметр настройки регулятора (постоянная времени интегрирования или время изодрома). Это время за которое регулирующий орган переместится из одного крайнего положения в другое при максимальном отклонении регулирующей переменной регулирующего органа от заданного положения.
, где Tu – параметр настройки регулятора (постоянная времени интегрирования или время изодрома). Это время за которое регулирующий орган переместится из одного крайнего положения в другое при максимальном отклонении регулирующей переменной регулирующего органа от заданного положения. ;
;  ;
; 


 ∆ xdt]
∆ xdt] Диаграмма работы:
Диаграмма работы:  ∆ xdt
∆ xdt ∆ x
∆ x


 достоинства: более высокая (по сравнению с П) скорость регулирования, недостатки: сложность настройки
достоинства: более высокая (по сравнению с П) скорость регулирования, недостатки: сложность настройки а
а б
б будет постоянной для всего диапазона х.
будет постоянной для всего диапазона х.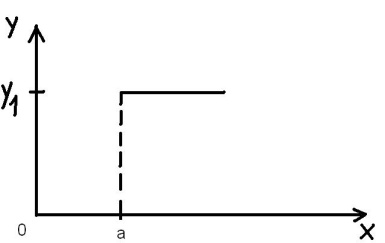 в
в , где k=const, то такой датчик называется линейным. Если статическая характеристика датчика имеет разрывный характер вида y=0 при 0< x< a, y=y1 при x> a, то датчик называется релейным
, где k=const, то такой датчик называется линейным. Если статическая характеристика датчика имеет разрывный характер вида y=0 при 0< x< a, y=y1 при x> a, то датчик называется релейным
