|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Методы и приборы для измерения расхода Функциональная схема САК расхода.Стр 1 из 5Следующая ⇒
Режимы работы АСУТП. Автоматизированный режим – технологич.персонал принимает активное участие в управлении. Возможны след.варианты этого режима: 1. при ручном управлении технолог.персонал по информации о состоянии объекта принимает решение об изменении технолог. режима и воздействует на процесс дистанционно, с помощью ручных задатчиков или органов управления; 2. в режиме советчика ЭВМ рекомендует технолог.персоналу оптимальные значения наиболее важных параметров. Технолог.персоанл на основе опыта и данных принимает решеение. 3. диалоговый режим – при котором технолог.персонал имеет возможность получать по запросу доп. информацию о настоящем и будущем процессах и на основании этого принимать решения. Автоматический режим – осущест. управленческое воздействие без участия человека. Возможны след.варианты: 1. супервизорное (косвенное управление). ЭВМ автоматически изменяет установки и коэффициент настройки. При этом на программном уровне решаются вопрсоы защиты объекта управления от опасных изменений технологич. параметров. 2. прямое цифровое управление при котором ЭВМ реализует результаты расчётов по поиску оптимальных режимов (при этом резко возрастают требования к надёжности управления системы).
Методы и приборы для измерения расхода Функциональная схема САК расхода. приборы делятся на: электрические и гидравлические. Классификация устройств осуществляется По функциональному признаку, выделяют группы: 1. Устройство получения нормирующей информации О состоянии процесса.2. устройство преобразования обработки хранения инфорации выбор команд управления(анализаторы управления, функциональные преобразователи, регуляторы).3. устройства исполнения команд на воздействие на процесс(усилитель мощности).4. устройство для приема преобразования и передачи информации по каналам связи(камутаторы, модемы ). 4. Постановка задач оптимизации, формирование критериев оптимальности. Для формулирования задачи необходимо установить набор условий, определ. множество допустимых параметров. Такими условиями явл. связи между искомыми переменными, пределы которых могут выбираться каждой из переменных. При формулировке задач оптимизации часть показателей вводится в критерий оптимальности, а остальное учитывается как ограничение. Классической постановкой задачи оптимизации явл.: 1. дано дифферен. уравнение, описывающее процесс в оптимизированной системе управления в виде: z = (z, v, t), где z – вектор состояния системы; v – вектор управления; t – время. 2. дано начальное время t0и соответс. ему вектор z0. Дается также конечное время tkи соответ. ему zk. Часто требуется, чтобы tk было как можно меньше для достижения zk/ 3. задан критерий оптимальности в общем виде: j = 4. накладываются ограничения на вектора uи z. Целью такой задачи явл. определение функции управления: u = f (z, t), которое приведёт систему из z0 приt0 в конечное состояниеzк приtк. Таким образом, чтобы критерий имел максимум или минимум.
Измерительные устройства уровня. Функциональная схема САК уровня. Поплавковые уровнемеры В поплавковых уровнемерах имеется плавающий на поверхности жидкости поплавок, в результате чего измеряемый уровень преобразуется в перемещение поплавка. В таких приборах используется легкий поплавок, изготовленный из коррозионно-стойкого материала. Показывающее устройство прибора соединено с поплавком тросом или с помощью рычагов. Поплавковыми уровнемерами можно измерять уровень жидкости в открытых емкостях. Гидростатические уровнемеры Гидростатический способ измерения уровня основан на том, что в жидкости существует гидростатическое давление, пропорциональное глубине, т. е. расстоянию от поверхности жидкости. Поэтому для измерения уровня гидростатическим способом могут быть использованы приборы для измерения давления или перепада давлений. В качестве таких приборов обычно применяют дифманометры. При включении дифманометра перепад давлений на нем будет равен гидростатическому давлению жидкости, которое пропорционально измеряемому уровню. Радиоизотопные уровнемеры Такие уровнемеры применяют для измерения уровня жидкостей и сыпучих материалов в закрытых емкостях. Их действие основано на поглощении у-лучей при прохождении через слой вещества. В радиоизотопном уровнемере источник и приемник излучения подвешены на стальных лентах, на которых они могут перемещаться в трубах по всей высоте бака. Ленты намотаны на барабан, приводимый в движение реверсивным электродвигателем. Ультразвуковые и акустические уровнемеры Действие уровнемеров этого типа основано на измерении времени прохождения импульса ультразвука от излучателя до поверхности жидкости и обратно. При приеме отраженного импульса излучатель становится датчиком. Если излучатель расположен над жидкостью, уровнемер называется акустическим; если внутри жидкости — ультразвуковым. В первом случае измеряемое время будет тем больше, чем ниже уровень жидкости, во втором — наоборот.
Дискретные регуляторы. Дискретные регуляторы – регуляторы прерывистого действия непрерывному изменению входной величины соответствует прерывистое изменение регул. Хотя бы в одном из элементов рег-ра существенным образом влияющие на работу регулятора в целом, в свою очередь, подразделяются на позиционные и импульсные. Пз- регул. У которых при изменении на входе выходная величина может принимать только определенное, заранее известное Значения..И-рег-ры -к ним относятся те у которых изменение выходной величины X пропорционально интегралу отклонения выходной величины У от заданного значения U по времени. Приборы для изменения влажности. Функциональная схема САК влажности Для измерения влажности используются приборы, называемые гигрометрами. 1 Влагомер (< измеритель влажности> ): измерительный прибор, предназначенный для измерения одной или нескольких величин влажности твердых или жидких веществ. 2 Гигрометр (< измеритель влажности>, < влагомер газов> ): измерительный прибор, предназначенный для измерения одной или нескольких величин влажности газов. 3)Датчик влажности; датчик: первичный измерительный преобразователь величин влажности в другие физические величины, например в электрические. 4)Психрометр: устройство для реализации психрометрического метода измерения, содержащее сухой и смоченный термометры.
11. Основные преобразования алгебры логики. Законы алгебры логики. Законы: 1) Переместительный (коммутационный) - х1х2=х2х1; х1+х2=х2+х1; 2) Сочетательный – х1(х2х3) = (х1х2)х3; х1+(х2-х3) = (х1+х2)+х3; 3) Распределительный - х1(х2+х3) = х1х2+х1х3; 4) Поглощения - х1(х1+х2) = х1х1+х1х2 = х1+х1х2 = х1(1+х2) = х1; 5) Инверсии – х1х2 = х1+х2; х1+х2 = х1х2; над иксами нужны полосочки) Функциональная схема САР давления. Классификация элементов САУ Большое разнообразие, используемых САУ требует применение различных признаков классификации таких систем. Рассмотрим классификации: 1. По характеру алгоритма функционирования: 1.1 Система стабилизации.- Они поддерживают требуемое значение управляемой величины. В этих системах задающих воздействие x(t)=const. Стабилизация выходной величины ОУ осуществляет автоматический регулятор. 1.2 Системы программного управления. Они предназначаются для изменения управляемой величины по определенному предписанию программе, технического процесса. Сама программа задается при помощи задатчика и представляет собой последовательность команд. 1.3 Следящие автоматические системы. Они предназначаются для изменения управляемой величины по закону, заранее неизвестной функции времени. В таких системах применяется своя терминология: входная величина – ведущая выходная – ведомая окончание процесса – отработка и т.д. 2. По способности САУ к самоприспосабливаемости.-с-мы в составе которых имеются дополнительное автоматическое управление, изменяющее алгоритм функционирования основного АРУ, таким образом, чтобы система в целом осуществляла ЗАФ, называется самоприспосабливающимся. Такие системы обладают свойством адаптации. 2.1 Системы экстремального управления. 2.2 Системы с перестраивающимися устройствами.-Эти с-мы, у которых параметры или их структура автоматики изменяется в зависимости от управляющих и возмущающих воздействий. 2.3 Аналитические самонастраивающиеся системы.Это с-мы, у которых их перестройка осуществляется на основе аналитического определения их динамических характеристик. В состав этих систем обязательно входит вычислительные машины. 3. По характеру управления во времени. 3.1.Непрерывные САУ. 3.2. Дискретные САУ (импульсные системы, релейные и позиционные системы) 4. По математическому описанию. - Линейные САУ. - Нелинейные САУ. · 5 По числу управляемых величин. · - Одномерные системы. -Многомерные системы. 6 По принципу действия. 6.1 Системы прямого действия. Это системы в которых чувствительный элемент (датчик) действует непосредственно на управляемый орган. 6.2 Системы непрямого действия. Это системы у которых после чувствительного элемента установлены усилители и сервоприводы. 7 По виду зависимости между управляемой величиной и нагрузкой на ОУ. 7.1 Системы статического регулирования.Статическая с-ма – это с-ма, в которой при возмущающем или задающем воздействии, стремящемся к постоянной величине, отклонение управляемой величины также стремится к постоянной величине.Для реализации такой системы используют статический регулятор.. 7.2 Система астатического регулирования.Астатическая система – это система, в которой при возмущении или задании отклонения управляемой величины в установившемся режиме, при постоянном значении, возмущения или задания равно нулю.
Интегрирующее звено Динамическая характеристика: Т*dy/dt=к*х Преобразуем: dy/dt=к*х/Т, y-y0=к/Т* График переходного процесса:
Звено чистого запаздывания Динамическая его характеристика имеет вид: у=х*(t – τ ), где τ – время чистого запаздывания. График переходного процесса:
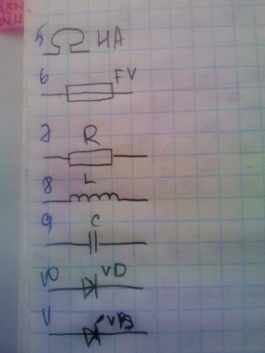
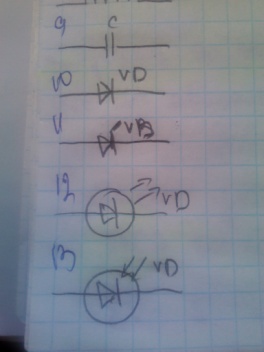
Функциональные схемы автоматизации (ФСА). Правила построения. Условные обозначения элементов. ФС- является техническим документом, который определяет функционально- блочную структуру отдельных узлов системы автоматического контроля и управления технологических процессов. Она выполняется в виде чертежа, на котором условно обозначены оборудование, линии матер.потоков, запорная и регулир. аппаратура, а также приборы систем контроля и регулирования в соответствующими связями и условными обозначения. ФС имеет два варианта исполнения: -сокращенные ( упрощенный); -расширенный(развернутый). Упрощенный вариант используют для отображения не технологических схемах приборов сис-мы управления в целом. Для более подробного описания испол-ют развернутый способ построения ФСА. Толщина линий, к-раяиспол-ся в графич. условных обозначениях на схемах составляет: -для приборов и средств автоматизации 0, 5-0, 6 мл; -для горизонтальной разделительной линии, а также линий связи 0, 2=0, 3 мл; -для контуров технолог.обор-ния 0, 6-1, 5 мл; -для материальных потоков 0, 8-1, 2 мл. При выполнении чертежа условные изображения обор-ния располагаются в середине листа ближе к верхней левой части. Под изображением располагается таблица с приборами и средствами автоматизации, расположенным на щите оператора и по месту. А также если в системе автомат.управления используется микропроцессор регулирования контроллер и SCADA система, соот-но и их изображение. Типовые внешние воздействия 1) Воздействие с наиболее неблагоприятным законом изменения. 2) Воздействие с законом наиболее близким к реальному 3) С наиболее простым математическим описанием Типовой набор: 1) Ступенчатое воздействие при t=0, входная величина X 2) Линейное воздействие с постоянной скоростью 3) Импульсное —кратковременный импульс с большой амплитудой и малой длительностью.— Ударные нагрузки 4) Гармонические воздействия — одна входная величина изменяет по синусоидальному или косинусоидальному закону. 5) Переходная функция звена — реакция звена на единичное ступенчатое воздействие.Y(p)=W(p)*X(p); H(p)=> W(p)/p; L{1(t)}=1/p; h(t)=L-1[W(p)/p] 6) Импульсная переходная или весовая функция — реакция звена на импульсное воздействие в виде δ UY(p)=W(p)*X(p); L[δ (t)]=1; K(p)=W(p)*1; k(t)=L1[W(p)]; W(p)=pH(p)=k(p); k(t)=dh/dt Достоинством временных характеристик является то, что они могут быть получены экспериментально. Принципиальные электрические схема систем управления(ПСА). Правила построения, условные обозначения. Принципиальная схема определяет состав элементов системы автоматизации и связи между ними. Дает детальное представление о принципах работы устройств в целом. ПСА составляется на основе ФСА и других документов системы автоматизации. По назначению ПСА делятся на: -схемы управления - схемы сигнализации - схемы питания. Размеры условных обозначений и условные буква подписей эл-тов выполняются в соот-виис ГОСТом. Линии эл.связей отражают размером 0, 8-1, 4 мл. 1-асинхронный двигатель, 2- двигатель постоянного тока, 3-трансформатор, 4- сигнальная лампа, 5- электр.звонок, 6-предохранитель, 7-резистр, 8-катушка, 9- конденсатор, 10-диод, 11-диод – теристр, 12- светодиод, 13-фотодиод, 14- катушка магнитного пускателя, 15-чувствительный элемент теплового реле, 16- нормально разомкнутые выключатели нажимного действия 17-нормально замкнутые выключатели нажимного действия 18- нормально разомкнутый контакты магнитного пускателя 19- нормально замкнутые контакты магнитного пускателя, 20-автоматический воздушный переключатель.
Режимы работы АСУТП. Автоматизированный режим – технологич.персонал принимает активное участие в управлении. Возможны след.варианты этого режима: 1. при ручном управлении технолог.персонал по информации о состоянии объекта принимает решение об изменении технолог. режима и воздействует на процесс дистанционно, с помощью ручных задатчиков или органов управления; 2. в режиме советчика ЭВМ рекомендует технолог.персоналу оптимальные значения наиболее важных параметров. Технолог.персоанл на основе опыта и данных принимает решеение. 3. диалоговый режим – при котором технолог.персонал имеет возможность получать по запросу доп. информацию о настоящем и будущем процессах и на основании этого принимать решения. Автоматический режим – осущест. управленческое воздействие без участия человека. Возможны след.варианты: 1. супервизорное (косвенное управление). ЭВМ автоматически изменяет установки и коэффициент настройки. При этом на программном уровне решаются вопрсоы защиты объекта управления от опасных изменений технологич. параметров. 2. прямое цифровое управление при котором ЭВМ реализует результаты расчётов по поиску оптимальных режимов (при этом резко возрастают требования к надёжности управления системы).
Методы и приборы для измерения расхода Функциональная схема САК расхода. приборы делятся на: электрические и гидравлические. Классификация устройств осуществляется По функциональному признаку, выделяют группы: 1. Устройство получения нормирующей информации О состоянии процесса.2. устройство преобразования обработки хранения инфорации выбор команд управления(анализаторы управления, функциональные преобразователи, регуляторы).3. устройства исполнения команд на воздействие на процесс(усилитель мощности).4. устройство для приема преобразования и передачи информации по каналам связи(камутаторы, модемы ). 4. Постановка задач оптимизации, формирование критериев оптимальности. Для формулирования задачи необходимо установить набор условий, определ. множество допустимых параметров. Такими условиями явл. связи между искомыми переменными, пределы которых могут выбираться каждой из переменных. При формулировке задач оптимизации часть показателей вводится в критерий оптимальности, а остальное учитывается как ограничение. Классической постановкой задачи оптимизации явл.: 1. дано дифферен. уравнение, описывающее процесс в оптимизированной системе управления в виде: z = (z, v, t), где z – вектор состояния системы; v – вектор управления; t – время. 2. дано начальное время t0и соответс. ему вектор z0. Дается также конечное время tkи соответ. ему zk. Часто требуется, чтобы tk было как можно меньше для достижения zk/ 3. задан критерий оптимальности в общем виде: j = 4. накладываются ограничения на вектора uи z. Целью такой задачи явл. определение функции управления: u = f (z, t), которое приведёт систему из z0 приt0 в конечное состояниеzк приtк. Таким образом, чтобы критерий имел максимум или минимум.
Популярное:
|
Последнее изменение этой страницы: 2016-04-10; Просмотров: 1220; Нарушение авторского права страницы
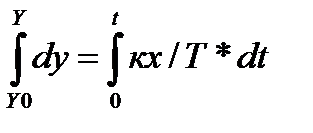 , Проинтегрируем:
, Проинтегрируем: 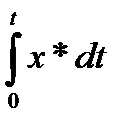 , х=cоnst, y=кх/Т*t+y0
, х=cоnst, y=кх/Т*t+y0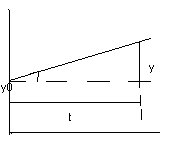
 y/t=кх/Т=tgα, α =аrctgк*х/Т. Получим функцию звена, преобразуем по Лапласу: Т*р*y(р)=к*х(р), W(р)=y(р)/х(р)=к/Т*р. Данное звено называется астатическим звеном 1-го порядка (емкостные астатические объекты, интегральные регуляторы).
y/t=кх/Т=tgα, α =аrctgк*х/Т. Получим функцию звена, преобразуем по Лапласу: Т*р*y(р)=к*х(р), W(р)=y(р)/х(р)=к/Т*р. Данное звено называется астатическим звеном 1-го порядка (емкостные астатические объекты, интегральные регуляторы).
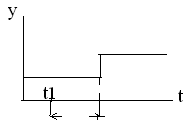 Характеристика – величина у на выходе звена = вх величине х, но через время τ. Передаточная функция имеет вид: W(р)=у(р)/х(р)=е-р*τ.
Характеристика – величина у на выходе звена = вх величине х, но через время τ. Передаточная функция имеет вид: W(р)=у(р)/х(р)=е-р*τ.