|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
ВВЕДЕНИЕ В ТЕОРИЮ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
S 31. СПОСОБЫ ОПИСАНИЯ РАБОТЫ АВТОМАТИЧЕСКИХ СИСТЕМ В реальных условиях на ход протекающих технологических процессов влияют возмущающие воздействия — изменение количественных и качественных характеристик материальных потоков. Это приводит к нарушению нормального режима работы оборудования, т. е. к отклонению технологических переменных, характеризующих режим, от заданного значения. Для поддержания параметров на заданном уровне используют автоматические регуля-
торы, которые решают задачу стабилизации оптимальных режимов путем изменения количества регулируемой среды. Описать работу автоматической системы можно словесно. Такое описание совершенно необходимо при решении любых задач, возникающих в автоматических системах, поскольку оно поясняет в первую очередь принцип действия конкретной системы.
Рассмотрим систему автоматического регулирования уровня жидкости H в баке (рис. 53). Возмущающими воздействиями являются изменения расхода. Если приток Qп равен расходу Qр, регулируемая величина Н в баке 1 объекта регулирования равна заданному значению Н3ад. При нарушении равенства Qп = Qр уровень изменяется, что приводит к рассогласованию Направление вращения двигателя, а следовательно, открытие или закрытие вентиля 7 зависит от направления изменения уровня, т. е. от знака рассогласования Словесное описание не может в полной мере характеризовать систему из-за отсутствия количественной оценки качества работы последней. Кроме того, существует много систем, различных как по назначению, так и по принципу действия, и описание каждой из них в отдельности не позволяет дать каких-либо обобщений и сравнить различные системы между собой. Поэтому для описания работы автоматических систем используются другие способы, позволяющие количественно и качественно описывать поведение системы как в установившемся, так и переходных режимах. Работу любой автоматической системы в установившемся и переходном режимах можно описать, использовав статические и динамические характеристики элементов системы. Статической характеристикой называют зависимость выходного параметра от входного в установившемся режиме. Статические характеристики позволяют рассчитать величину изменения выходного параметра при известном изменении входного воздействия после достижения установившегося состояния. Математическое выражение этой зависимости у = f (х) называют уравнением статики. На рис. 54 приведены примеры статических характеристик элементов автоматических систем, которые могут быть линейными и нелинейными. Линейная статическая характеристика представляет собой прямую, проходящую под некоторым углом к оси абсцисс (рис. 54, а). Угол наклона характеристики есть величина постоянная, а его тангенс определяет величину коэффициента передачи или коэффициента усиления k элемента: k = y/x. Для нелинейных статических характеристик коэффициент передачи в разных точках характеристики различен и определяется величиной тангенса угла наклона касательной к выбранной точке нелинейной характеристики.
Рис. 54. Статические характеристики: линейная (а), нелинейная (б) Рис. 55. Технологический объект управления Большинство реальных объектов управления обладают нелинейными статическими характеристиками, и их динамика описывается нелинейными дифференциальными уравнениями, решение которых весьма сложно. Поэтому важно рассмотреть возможность их линеаризации — замены нелинейной статической характеристики отрезками прямых линий. Линеаризация нелинейной статической характеристики возможна только в том случае, если она непрерывна и имеет непрерывное изменение производной во всем диапазоне кривой. Для линеаризации заданной аналитически нелинейной статической характеристики у = f (х) ее раскладывают в окрестности значения входной величины х0 в ряд Тейлора:
и приближенно заменяют f (х) двумя первыми членами этого ряда y т. е. кривую f (х) заменяют прямой, касательной к ней в точке х0, с наклоном, соответствующим f’ (х0). При линеаризации нелинейных характеристик предполагается, что отклонения переменных от их установившихся значений остаются достаточно малыми. Если статическая характеристика задана графически, для ее линеаризации в рабочей точке с абсциссой х0 проводят касательную так, чтобы отрезки между кривой и касательной в диапазоне реальных изменений входной величины х1 и х2 были равны между собой Допустимость замены нелинейной функции прямой линией оценивается по величине возможных ошибок из-за расхождения, приближенно их можно оценивать по величине Динамические характеристики автоматической системы и ее элементов есть зависимости изменения выходного параметра во времени при известном законе изменения входного воздействия. Динамические свойства автоматической системы и ее элементов могут быть описаны дифференциальными уравнениями, передаточными функциями, временными и частотными характеристиками. Дифференциальные уравнения автоматической системы и ее элементов. Для аналитического описания динамических свойств элементов автоматических систем дифференциальными уравнениями используют самые разнообразные физические, химические и другие законы. Наиболее часто применяют уравнения материального или энергетического балансов. Рассмотрим пример составления дифференциального уравнения для некоторых простейших элементов систем автоматического регулирования. На рис. 55 в качестве элемента АСР показан объект регулирования, представляющий собой теплообменник, в который непрерывно подаются холодная вода и пар. Смешиваясь с горячим конденсатом, вода нагревается и, достигнув требуемой температуры, подается потребителю. Выходной величиной в этом объекте является температура горячей воды, а входной — поток тепла, поступающий в теплообменник с паром и холодной водой. Обозначим через Q1 и Q2 количество тепла, поступающего в теплообменник в единицу времени с холодной водой и паром соответственно, Q3 —__количество тепла, выходящего из теплообменника в единицу времени с горячей водой. При установившемся режиме потоки тепла, приходящие и уходящие в теплообменнике, равны между собой: Если изменить параметры какого-либо из тепловых потоков или всех одновременно, температура
где Предположим, что количество тепла, поступающего с холодной водой, неизменно, т. е.
Обычно дифференциальные уравнения приводят к виду, при котором коэффициент при переменной
Введем обозначения: Коэффициент Т — постоянная времени; К, — коэффициент передачи объекта регулирования. Таким образом, динамические свойства смешивающего теплообменника описывают линейным дифференциальным уравнением первого порядка. Дифференциальное уравнение элемента или всей автоматической системы может иметь более высокий порядок и содержать производные не только выходной (в левой части уравнения), но и входной величины (в правой части). В общем случае автоматическая система может быть описана линейным дифференциальным уравнением с постоянными коэффициентами в виде
Решение дифференциальных уравнений высокого порядка вызывает значительные трудности из-за необходимости определения корней характеристического уравнения и постоянных интегрирования, поэтому часто интеграл дифференциального уравнения находят с помощью операторного метода Лапласа. Передаточные функции. Это — особая форма записи преобразованного по Лапласу дифференциального уравнения. Использование передаточных функций дает ряд преимуществ при исследова- нии процесса регулирования, т. е. при решении дифференциального уравнения динамики. Преобразование Лапласа позволяет представить функцию вещественного переменного (времени) как функцию комплексного переменного. Это осуществляют с помощью прямого преобразования Лапласа по формуле
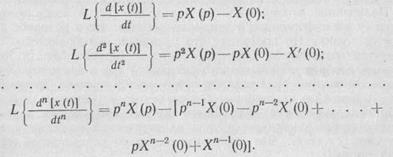
Исходная функция времени х (t) называется оригиналом, комплексная функция X (р) — изображением. Сокращенно преобразование Лапласа записывают также в виде Если известно изображение X (р) и требуется получить функцию времени, то оригинал находят по правилам обратного преобразования Лапласа. Рассмотрим основные свойства преобразования Лапласа. 1. Умножение оригинала на постоянную величину а соответст 2. Суммирование оригиналов соответствует суммированию изо 3. Дифференцированию оригиналов соответствуют следующие
При нулевых начальных условиях, если при t = 0 выходная величина х (0) и все ее производные х' (0)... хn-1 (0) равны 0, получим
Таким образом, в этом случае n-кратному дифференцированию оригинала соответствует просто умножение на рп его изображения.
4. Интегрирование интеграла соответствует делению изображения на р
Таким образом, в области изображений дифференциальные уравнения превращаются в алгебраические, а операции дифференцирования и интегрирования заменяются соответственно умножением или делением на оператор р. Это не только упрощает процесс решения сложных задач, но и открывает новые возможности переработки информации о динамических свойствах сложных систем по заданным характеристикам элементов системы. Решение дифференциального уравнения с помощью преобразований Лапласа основано на том, что в заданном уравнении выражения для неизвестной функции и ее производных, а также функций, характеризующих возмущающее воздействие, заменяют соответствующими изображениями. Таким образом получается вспомогательное уравнение в изображениях — алгебраическое. Из этого уравнения находят изображение искомой функции. Основная трудность при использовании этого метода заключается не в решении уравнения, а в переходах от оригинала функции к ее изображению и обратно. Практические операции прямого и обратного преобразования Лапласа осуществляют с помощью таблиц оригиналов и изображений, приводимых в справочниках. Полученное вспомогательное уравнение (17) в изображениях несет ту же информацию о динамике системы, что и исходное дифференциальное. Но поскольку это уравнение алгебраическое, появляется возможность динамику системы характеризовать отношением изображений выходного сигнала Y (р) к входному X (р). Такое отношение представляет собой алгебраическое выражение и с его помощью простейшим образом непосредственно (не переходя к оригиналу решения) могут быть получены выражения, характеризующие как динамические, так и статические свойства анализируемой системы. Это отношение называют передаточной функцией системы
Из выражения (18) и определения передаточной функции следует, что Y(p) = W(p) X (р), т. е. изображение выходной величины равно произведению изображения входной величины на передаточную функцию этого элемента или системы. Передаточные функции широко используются при исследовании автоматических систем регулирования. На изучении ее свойств основаны все современные методы анализа качества автоматических систем, не требующие непосредственного решения дифференциального уравнения. Временные характеристики автоматической системы и ее элементов. Временными характеристиками системы называют зависи- мости от времени значений выходной величины при поступлении на вход некоторого типового воздействия. Наиболее важная временная характеристика — реакция системы на единичное ступенчатое воздействие входной величины, так как этот режим работы наиболее часто возникает в системе при ее включении, изменении режима и т. д. Таким образом, под временной характеристикой понимается процесс изменения выходной величины в функции времени при переходе системы из одного равновесного состояния в другое в результате поступления на вход единичного ступенчатого воздействия. Дифференциальное уравнение системы тоже определяет изменение выходной величины во времени, поэтому временная характеристика представляет собой графическое решение дифференциального уравнения системы для единичного входного воздействия при нулевых начальных условиях, и следовательно, характеризует динамические свойства системы. Так как временные характеристики системы могут быть получены не только путем решения дифференциального уравнения системы, но и экспериментально, то возможность изучения динамики системы по временной характеристике имеет важное практическое значение, поскольку в этом случае не требуется находить и решать дифференциальные уравнения. Если в течение всего времени перехода системы из одного устойчивого состояния в другое единичное входное воздействие (рис. 56, а) XBX= остается приложенным к звену или системе, то в этом случае временную характеристику принято называть переходной функцией элемента или системы. Графическое изображение переходной функции называют переходной характеристикой системы. Реакция системы на единичное ступенчатое воздействие в виде дельта-функции (рис. 56, б) называется импульсной переходной функцией. Ее графическое изображение называется импульсной переходной характеристикой элемента или системы.
При поступлении на вход элемента или разомкнутой системы с передаточной функцией W (р) входной величины хвх0 = 1 на выходе получаем временную характеристику увых (t) = h(t). При этом изображения входной и выходной величины равны: Из выражения (19) следует, что по временной характеристике системы можно получить передаточную функцию системы. Частотные характеристики автоматических систем и их элементов. Для описания поведения системы и ее элементов широко используют частотные характеристики, которые определяют их динамику при воздействии на их вход гармонических колебаний вида xВХ (t) = AВХl sin ( Если автоматическая система линейная, то на ее выходе также устанавливаются синусоидальные колебания с частотой
Рис. 56. Типовые входные воздействия: скачкообразное (а), импульсное (б) Рис. 57. Входные и выходные величины Амплитуда Авых1 и фаза Запишем хвх (t) и увых (t) в комплексном виде:
где j = Отношение выходных колебаний системы увых (t) к входным хвх (t), выраженным в комплексном виде, называют комплексным коэффициентом передачи системы при частоте
С изменением частоты колебаний на входе при постоянной амплитуде Aвх амплитуда выходных колебаний Aвых и фазовый сдвиг Зависимость отношения амплитуд выходных и входных колебаний от частоты
Графически АФХ представляет собой кривую, называемую годографом, описываемую на комплексной плоскости концом вектора, модуль которого равен значениям A(
Рис. 58. Частотные характеристики: амплитудно-частотная (а), фазо-частот-ная (б), амплитудно-фазовая (в) Проекцию АФХ на действительную ось комплексной плоскости называют вещественной частотной характеристикой и обозначают через R ( Частотные характеристики могут быть определены одна через другую с помощью следующих зависимостей:
Частотные характеристики могут быть получены экспериментально или из дифференциального уравнения системы. Если задана то для получения
Для получения второй производной функцию умножают на (j Подставив в дифференциальное уравнение выражения для входных и выходных установившихся колебаний, получим АФХ:
Таким образом, для получения АФХ достаточно в передаточную функцию системы вместо оператора р подставить j § 32. СТРУКТУРНЫЕ СХЕМЫ И ИХ ПРЕОБРАЗОВАНИЕ Структурная схема системы автоматического управления представляет собой ее динамическую модель и состоит из отдельных типовых динамических звеньев, отражающих динамические свойства системы в целом.
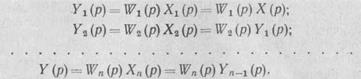
Рис. 59. Способы соединений звеньев: последовательное (а), параллельное (б), последовательно-параллельное (в) Чтобы получить структурную схему автоматической системы управления, необходимо каждый ее функциональный элемент заменить соответствующим динамическим звеном и соединить их в той же последовательности. Графически структурная схема системы изображается в виде прямоугольников, в которых записываются передаточные функции звеньев. Связи между звеньями обозначаются линиями со стрелками, указывающими направление передачи сигнала. Звенья, образующие структурную схему, могут быть соединены между собой последовательно, параллельно или встречно-параллельно. Зная передаточные функции отдельных звеньев, образующих структурную схему системы, и пользуясь определенными правилами эквивалентного преобразования структурных схем, можно получить передаточную функцию системы любой сложности и упростить структурные схемы системы в целом. Последовательное соединение звеньев. Последовательным называется такое соединение звеньев системы, при котором выход каждого предыдущего связан с входом последующего звена (рис. 59, а). При таком соединении звеньев все воздействия передаются после- довательно от одного звена к другому. При последовательном соединении п звеньев с передаточными функциями W1 (p), W2 (р)...... Wn (p) будем иметь следующую систему уравнений:
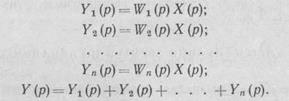
Решая эту систему уравнений относительно входной X (р) и выходной Y (р) величин, получим Y(p) = W1(p)W2(p)...Wn(p)X(p). Передаточная функция системы в целом W(p)=[Y(p)]/[X(p)]=W1(p) W2, (p)...Wn(p), следовательно, передаточная функция автоматической системы, состоящей из п последовательно соединенных звеньев, равна произведению передаточных функции всех звеньев, входящих в соединение. Параллельное соединение звеньев. Параллельным называется такое соединение, при котором входные воздействия всех звеньев одинаковы, а выходная величина системы равна сумме выходных величин отдельных звеньев (рис. 59, б). Так, для системы, состоящей из n параллельно соединенных звеньев, можно записать:
Решая эту систему уравнений относительно Y (р) и X (р), получим Y(p) = [W1(p) + W2(p)+... +Wn(p)]Y(p). Следовательно, систему, состоящую из п параллельно соединенных звеньев, можно заменить одним эквивалентным звеном, передаточная функция которого
равна сумме передаточных функций всех звеньев, входящих в это соединение. Встречно-параллельное соединение звеньев. Если выходная величина одного звена подается на вход другого, а входная величина первого звена формируется в виде суммы его входного воздействия и выходного воздействия второго звена, как это показано на рис. 59, в, то такое соединение называют встречно-параллельным или обратной связью. Обратной связью называется цепь передачи воздействий с выхода системы (звена) на ее вход. Обратная связь будет положительной, если выходная величина ее звена суммируется с входной величиной системы, и отрицательной, если выходная величина цепи обратной связи вычитается из входной величины. На вход первого звена, стоящего в прямой цепи системы, подается сигнал Для системы, показанной на рис. 59, в, с отрицательной обратной связью будем иметь следующую систему уравнений:
Решая эту систему уравнений, получим Y (Р) = [W1 (p) /(1 + W1 (p) W2 (p)] X (р). Следовательно, систему с обратной связью можно заменить одним эквивалентным звеном, передаточная функция которого
Используя полученные выражения для преобразования структурных схем, можно определить передаточные функции любой автоматической системы. § 33. КЛАССИФИКАЦИЯ ЗВЕНЬЕВ ПО ДИНАМИЧЕСКИМ СВОЙСТВАМ При решении задач анализа и синтеза автоматическую систему При представлении элементов системы в виде элементарных динамических звеньев не важен принцип построения элемента. Элементы различной физической природы могут быть представлены в виде одинаковых динамических звеньев, если их динамические свойства описываются одинаковыми дифференциальными уравнениями. Поэтому при решении задач анализа и синтеза автоматических систем многообразие элементов автоматики сводится к нескольким типовым элементарным динамическим звеньям. Существуют 6 типовых элементарных динамических звеньев: усилительное, апериодическое, колебательное, интегрирующее, дифференцирующее и чистого запаздывания. Усилительное звено. Это простейшее звено, которое образуется в случае передачи входного сигнала на выход без каких-либо замедлений или ускорений во времени, т. е. переходные процессы в звене отсутствуют. Примеры усилительных звеньев приведены на рис. 60, а—в. Свойства этого элемента описываются уравнением у = Кх, где К — коэффициент усиления звена.
Рис. 60. Усилительные и апериодические звенья: а — рычажная передача; б — зубчатая пара; в — усилитель; г — пассивный четырехполюсник; д — термопара; е — магнитный усилитель; ж — электродвигатель Передаточная функция звена представляет собой постоянную величину W (р) = К. Амплитудно-фазовая характеристика усилительного звена также равна постоянной величине W (j Апериодическое звено. Звено называется апериодическим, если его входная и выходная величины связаны между собой дифференциальным уравнением T(dy)/dt + y = Kx. Примеры апериодических звеньев приведены на рис. 60, г—ж. В операторной форме это уравнение может быть записано как (Tp+1)Y(p) = KX(p), тогда передаточная функция звена имеет вид W(p) = K/(Tp+1). Если на вход звена Подать ступенчатое воздействие, то временная характеристика будет иметь вид
Заменив р на j При Т1 = 2Т2 получают вещественные и равные корни уравнения
Колебательное звено. Колебательным называется звено, у которого выходные и входные величины связаны следующим дифференциальным уравнением:
которое в операторном виде записывается как Передаточная
где К — коэффициент усиления звена; Т1иТ2 — постоянные времени звена; при Т2 = 0 звена превращается в апериодическое. Примеры некоторых колебательных звеньев приведены на рис. 61. В зависимости от соотношения между постоянными времени Т1 и Т2 корни характеристического уравнения При Т1> 2Т2 получают вещественные и разные корни р1 =
При Т1 При T1< 2Т2 корни уравнения будут комплексными p1, 2 = =
Временная характеристика такого звена Рис. 61. Колебательные звенья: а — пассивный четырехполюсник; б — мембранный исполнительный механизм При Т1 = 0 в колебательном звене возникают незатухающие колебания. АФХ колебательного звена имеет вид
Амплитудно-частотная и фазочастотная характеристики колебательного звена:
Интегрирующее звено. Звено называется интегрирующим, если выходная величина пропорциональна интегралу от входной величины. Дифференциальное уравнение интегрирующего звена имеет вид T(dy)/(dt) = Kx.
Интегрируя это уравнение, получим
Рис. 62. Интегрирующие, дифференцирующие и запаздывающие звенья: а— пассивный четырехполюсник; б — гидравлический исполнительный механизм; в—электродвигатель; г - пассивный четырехполюсник; д - спокоитель с пружиной в механических цепях; е — ленточный конвейер Примеры некоторых интегрирующих звеньев приведены на рис. 62, а—в. Передаточная функция такого звена: W (р) = Временная характеристика интегрирующего звена у (t) = Популярное:
|
Последнее изменение этой страницы: 2016-04-10; Просмотров: 1465; Нарушение авторского права страницы

 между текущим Н и Н3ад, т. е.
между текущим Н и Н3ад, т. е.  U подается на усилитель 5, на выходе которого включен реверсивный двигатель 6. Вал электродвигателя связан с вентилем 7, являющимся регулирующим органом автоматической системы регулирования (АСР) уровня.
U подается на усилитель 5, на выходе которого включен реверсивный двигатель 6. Вал электродвигателя связан с вентилем 7, являющимся регулирующим органом автоматической системы регулирования (АСР) уровня.

 f(х0)+ f’(х0)(x -х0)
f(х0)+ f’(х0)(x -х0) и температура горячей воды неизменна:
и температура горячей воды неизменна: 
 станет изменяться, скорость этого изменения будет зависеть от величины изменения тепловых потоков и коэффициента А тепловой емкости объекта, «спустя некоторое время установится температура, соответствующая новому балансу тепловых потоков. В переходном режиме от одного установившегося состояния в другое справедливо уравнение
станет изменяться, скорость этого изменения будет зависеть от величины изменения тепловых потоков и коэффициента А тепловой емкости объекта, «спустя некоторое время установится температура, соответствующая новому балансу тепловых потоков. В переходном режиме от одного установившегося состояния в другое справедливо уравнение













 (t)=
(t)= 

 1t), где AВХl— амплитуда входных колебаний;
1t), где AВХl— амплитуда входных колебаний;  (рис. 57): уъых (t) = = AВХl sin (
(рис. 57): уъых (t) = = AВХl sin ( 

 ,
, 
 называют комплексной частотной характеристикой системы или амплитудно-фазовой характеристикой (АФХ) системы и обозначают через W (j
называют комплексной частотной характеристикой системы или амплитудно-фазовой характеристикой (АФХ) системы и обозначают через W (j 


 производной ее надо умножить на функцию j
производной ее надо умножить на функцию j 







 а временная характеристика записывается выражением
а временная характеристика записывается выражением




 функция колебательного звена имеет вид
функция колебательного звена имеет вид
 будут вещественными, мнимыми или комплексно-сопряженными. В соответствии с этим и временная характеристика звена будет иметь апериодический или колебательный характер.
будут вещественными, мнимыми или комплексно-сопряженными. В соответствии с этим и временная характеристика звена будет иметь апериодический или колебательный характер. 1 и р2 =
1 и р2 = 
 2Т2 переходные процессы в звене протекают апериодически и такое звено не является колебательным. Оно может быть представлено в виде последовательного соединения двух апериодических звеньев.
2Т2 переходные процессы в звене протекают апериодически и такое звено не является колебательным. Оно может быть представлено в виде последовательного соединения двух апериодических звеньев.