|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Уравнение круга равных высот.
Выведем уравнение КРВ. Для этого надо связать измеренный параметр h, текущие координаты sinh = sin величины - h, Один измеренный параметр определяет одну изолинию, с бесконечным множеством точек с координатами
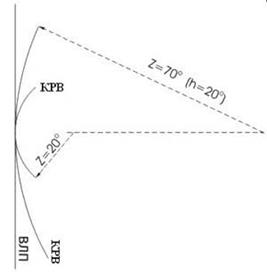
Графический метод ОМС по 2-м КРВ на земном глобусе. Для определения места судна необходимо выполнить следующие операции: 1. Необходимо измерить высоты 2-х звезд и заметить гриннвичское время этих измерений. 2. По моментам времени найти с помощью МАЕ гринвичские часовые углы и склонения этих светил, т.е. найти координаты полюсов освещения. 3. По координатам нанести полюса освещения на земной глобус. 4. Рассчитать по отсчетам секстана обсервованные высоты ho1 и ho2, после чего получить зенитные расстояния 5. Расстояниями равными зенитными расстояниям z1 и z2 из соответствующих полюсов освещения провести круги равных высот. Получим две точки пересечения, в которых может находиться наше судно. за обсервованное место судно примем место, ближайшее к счислимому месту.
Чтобы выполнить эти операции на земном глобусе и получить точные обсервованные координаты, необходимо иметь земной глобус соответсвующих размеров. Если будем исходить из принципа, чтобы одной минуте (одной миле) на глобусе соответствовал 1 милиметр, то глобус должен иметь диаметр около 7 метров (! ). Конечно, такой большой инстумент мореходной астрономии на судне разместить очень сложно и даже невозможно. На картах этот способ в чистом виде также не применим так как радиусы КРВ будут очень большими и поэтому проложить их невозможно. Поэтому для ОМС используется метод построения на карте не изолиний - кругов равных высот, а высотных линий положения. Этот вопрос более детально рассмотрим в следующем параграфе. Высотная линия положения и её свойства. · Понятие высотной линии положения. · Свойства ВЛП. · Аналитический метод ОМС. · Практика графического решения уравнений. Понятие высотной линии положения. Вспомним МОСовское определение линии положения. Линией положения называется кассательная (или хорда), проведенная к изолинии вблизи счислимого места и замещающая собой изолинию. Уравнение изолинии имеет следующий вид
Из МОСа известно, что модуль и направление градиента можно вычислить через частные производные:
При ОМС в мореходной астрономии в качестве навигационного парметра служит высота. По основным дифференциальным формулам мореходной астрономии имеем:
Уравнение ВЛП имеет следующий вид: Свойства ВЛП. 1. ВЛП - это приближенная линия.
По этой причине методу ВЛП присуше методическая погрешность. Построив две ВЛП, получим обсервованную точку Мо, точку пересечения 2-х ВЛП. Но на самом деле судно находится в точке пересечения изолиний в М1. Методическая погрешность будет тем больше, чем больше высоты светил и чем больше переносы. Чтобы свести к минимуму методическую погрешность, необходимо определяться по светилам с небольшими высотами, а если это невозможно, то применять метод последовательных приближений (метод иттераций). Получив на первом этапе обсервованную точку Мо, принимаем её за счислимую, и повторяем сначала процесс вычислений. Обычно на 2-ом или 3-ьем шаге вычислений получается обсервованная точка, практически совпадающая с точкой пересечения по изолиниям. Естественно, что процесс последовательных приближений выполняется не вручную, а на компьютере по специально разработанной программе, в основе которой лежит аналитическим метод. Этот метод будет рассмотрен ниже
2. Градиент ВЛП равен 1.
где 3. Положение ВЛП на карте не зависит от принятых счислимых координат.
Аналитический метод ОМС. Аналитический метод ОМС основан на расчете элементов 2-х ВЛП - азимутов и переносов (ручным методом или с использованием программирумых микрокалькуляторов) и на аналитическом расчете системы уравнений 2-х ВЛП
Тогда Популярное:
|
Последнее изменение этой страницы: 2016-04-11; Просмотров: 1715; Нарушение авторского права страницы
 i,
i,  i и экваториальные координаты светила С. Т.е. необходимо осуществить переход от экваториальной системы координат к горизонтной, решив параллактический треугольник. Уравнение КРВ будет иметь следующий вид
i и экваториальные координаты светила С. Т.е. необходимо осуществить переход от экваториальной системы координат к горизонтной, решив параллактический треугольник. Уравнение КРВ будет иметь следующий вид + cos
+ cos 

 +
+ 


 и
и  Следовательно,
Следовательно,  Откуда,
Откуда,