
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Алгоритм решения задач ЛП графическим методом
Шаг 1. В системе ограничений задачи ЛП заменить знаки неравенств на знаки точных равенств и построить соответствующие прямые. Шаг 2. Найти и заштриховать полуплоскости, разрешенные каждым из ограничений-неравенств задачи ЛП. Для этого необходимо подставить в конкретное неравенство координаты какой-либо точки (например, (0; 0)), и проверьте истинность полученного неравенства. Если неравенство истинное, то надо заштриховать полуплоскость, содержащую данную точку; иначе (неравенство ложное) надо заштриховать полуплоскость, не содержащую данную точку. Поскольку x1 и x2 должны быть неотрицательными, то их допустимые значения всегда будут находиться выше оси x1 и правее оси x2. Ограничения-равенства разрешают только те точки, которые лежат на соответствующей прямой, поэтому необходимо выделить на графике такие прямые. Шаг 3. Определить область допустимых решений как часть плоскости, принадлежащую одновременно всем разрешенным областям, и выделить ее. При отсутствии области допустимых решений задача не имеет решений. Шаг 4. Если область допустимых решений – не пустое множество, то построить целевую прямую, т.е. любую из линий уровня Шаг 5. Построить вектор Шаг 6. При поиске максимума целевой функции необходимо передвигать целевую прямую в направлении вектора Шаг 7. Определить координаты точки max (min) целевой функции
Пример решения задачи ЛП с двумя переменными Графическим методом Пример №2.1. Найти оптимальное решение примера №1.2 о производстве мыла, математическая модель которой имеет вид
Решение. Для построения прямых ограничений необходимо вычислить координаты точек пересечения этих прямых с осями координат (рис.2.2).
(1) – (3) – Прямая (4) проходит через точку x2 =2 параллельно оси x1.
Рис. 2.2. Графическое решение Далее следует определить область допустимых значений. Например, подставив точку (0; 0) в исходное ограничение (3), результатом является неравенство Целевую прямую можно построить по уравнению
Вектор
Е( Максимальное значение целевой функции равно
Ответ. Наилучшим режимом работы фабрики является ежесуточное производство хозяйственного мыла в объеме Доход от продажи мыла составит СИМПЛЕКСНЫЙ МЕТОД РЕШЕНИЯ ЗАДАЧИ ЛИНЕЙНОГО ПРОГРАММИРОВАНИЯ Задача ЛП сформулирована как задача минимизации или максимизации линейной формы, переменные которой связаны некоторой системой линейных уравнений и должны быть неотрицательными.
Для решения такой задачи применяется симплексный метод линейного программирования. Для того чтобы решать задачу ЛП симплексным методом необходимо уметь преобразовывать задачу к каноническому виду. Популярное:
|
Последнее изменение этой страницы: 2016-04-11; Просмотров: 2921; Нарушение авторского права страницы
 , где F – произвольное число.
, где F – произвольное число. , который начинается в точке (0; 0), заканчивается в точке
, который начинается в точке (0; 0), заканчивается в точке  . Если целевая прямая и вектор
. Если целевая прямая и вектор  построены верно, то они будут перпендикулярны.
построены верно, то они будут перпендикулярны.  , при поиске минимума целевой функции – против направления вектора
, при поиске минимума целевой функции – против направления вектора  . Последняя по ходу движения вершина области допустимых решений будет точкой max или min целевой функции. Если такой точки (точек) не существует, то целевая функция не ограничена на множестве планов сверху (при поиске max) или снизу (при поиске min).
. Последняя по ходу движения вершина области допустимых решений будет точкой max или min целевой функции. Если такой точки (точек) не существует, то целевая функция не ограничена на множестве планов сверху (при поиске max) или снизу (при поиске min). и вычислить значение самой целевой функции F(X*). Для вычисления координат оптимальной точки X* необходимо решить систему уравнений прямых, на пересечении которых находится X*.
и вычислить значение самой целевой функции F(X*). Для вычисления координат оптимальной точки X* необходимо решить систему уравнений прямых, на пересечении которых находится X*.


 (2) –
(2) – 

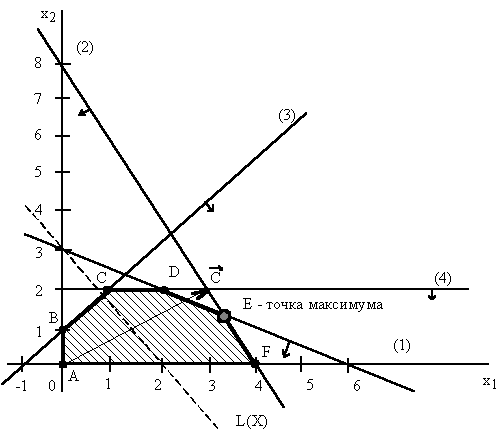
 , что является истинным. Поэтому стрелкой (или штрихованием) обозначается полуплоскость, содержащая точку (0; 0), т.е. расположенная правее и ниже прямой (3). Аналогично определяются допустимые полуплоскости для остальных ограничений (рис.2.2). Общей областью, разрешенной всеми ограничениями, т.е. областью допустимых значений является многоугольник ABCDEF.
, что является истинным. Поэтому стрелкой (или штрихованием) обозначается полуплоскость, содержащая точку (0; 0), т.е. расположенная правее и ниже прямой (3). Аналогично определяются допустимые полуплоскости для остальных ограничений (рис.2.2). Общей областью, разрешенной всеми ограничениями, т.е. областью допустимых значений является многоугольник ABCDEF. ,
, 
 строится из точки (0; 0) и направляется в точку (3; 2). Точка Е – это последняя вершина многоугольника допустимых решений ABCDEF, через которую проходит целевая прямая, двигаясь по направлению вектора
строится из точки (0; 0) и направляется в точку (3; 2). Точка Е – это последняя вершина многоугольника допустимых решений ABCDEF, через которую проходит целевая прямая, двигаясь по направлению вектора 
 ,
,  ,
,  ) [т/сутки].
) [т/сутки]. [тыс. руб./сутки].
[тыс. руб./сутки]. т и туалетного мыла в объеме
т и туалетного мыла в объеме  т.
т. тыс. руб. в сутки.
тыс. руб. в сутки.