
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Криволинейная ортогональная система координатСтр 1 из 5Следующая ⇒
ФЕДЕРАЛЬНОЕ АГЕНТСТВО СВЯЗИ Московский технический университет связи и информатики _____________________________________________________________ Корнюхин В.И
М О Т э М П
( конспект лекций ) Л Е К Ц И Я - 1 Часть 1 Системы координат
r = x0 x + y0 y + z0 z где: x0, y0, z0 – единичные векторы или орты прямоугольной системы координат. Длина радиус-вектора r (его численное значение или модуль) обозначается как | r | = r = 0P и является функцией
Единичный вектор или орт радиуса вектора r0, направление которого совпадает с направлением r, может быть представлен в виде:
, где
-направляющие косинусы углов между r0 и положительными направлениями осей 0x, 0y, 0z. Расстояние d между точками P1(x1, y1, z1) и P2(x2, y2, z2) равно
Направленный отрезок (вектор P1P2 ) может быть записан в виде: P1P2 = x0 (x2 – x1) + y0 (y2 – y1) + z0 (z2 – z1) Векторы и действия над ними Векторные и скалярные величины в теории электромагнитного поля Величины, значения которых могут быть изображены положительными или отрицательными числами ( скалярами), называются скалярными. Величины, значения которых характеризуются (в отличие от скаляра) не только количеством, но и направлением в пространстве называются векторными и могут быть изображены векторами. В произвольной ортогональной системе координат запись вектора имеет следующий вид A = I1 A1 + I2 A2 + I3 A3. Проекции A1.A2 и A3 называются компонентами или составляющими вектора A; I1, I2 и I3 – единичные векторы или орты в выбранной системе координат. В декартовой системе координат A = x0 Ax + y0 Ay + z0 Az,
Сложение (вычитание) в векторной алгебре означает алгебраическое сложение (вычитание) компонент векторов: A ± B = l 1(A1 ± B1) + l 2(A2 ± B2) + l 3(A3 ± B3) Где l 1, l 2 и l 3 орты системы координат Умножение векторов Скалярное умножение векторов. Скалярным произведением векторов A и B называют скаляр, равный произведению длин этих векторов на косинус образованного ими угла j. Скалярное произведение обозначают A.B или ( A, B ). В декартовой системе координат: (A, B) = AxBx + AyBy + AzBz Зная скалярное произведение двух векторов, легко найти угол между ними
а также величину проекции одного вектора на направление, определяемое другим вектором, например, проекция вектора А на В равна
A´ B, [ A, B ], [ AB ], Из определения векторного произведения следует, что |[ A, B ]| = AB sin j = S [ A, B ] = [ l 1A1 + l 2A2 + l 3A3, l 1B1 + l 2B2 + l 3B3] = =l 1(A2B3 – B2A3) + l 2(A3B1 – B3A1) + l 3(A1B2 – B1A2). Или
[ A, B ] = - [ B, A ] Смешанное произведение трех векторов.
В декартовой системе координат выражение смешанного произведения принимает вид:
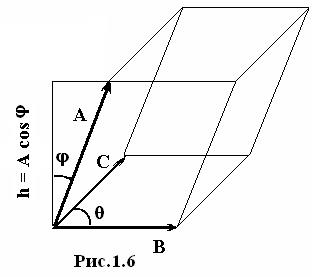
Векторное произведение [ B, C ] представляет собой вектор, перпендикулярный В и С, модуль которого равен площади параллелограмма, построенного на векторах В и С, т.е. S = │ [ B, C ]│ =BC sin θ (рис.1.6). Этот параллелограмм можно рассматривать как основание параллелепипеда, построенного на векторах А, В и С, следовательно модуль смешанного произведения будет равен произведению площади основания параллелепипеда на его высоту (проекция ребра А на его перпендикуляр к основанию). То есть модуль смешанного произведения равен объему параллелепипеда V, построенному на векторах А, В, и С (рис.1.6). V=│ ( A, [ B, C ])│ =│ Acosφ │ [ B, C ]│ │ =hS Нетрудно показать, что смешанное произведение обладает следующим свойством ( А, [ B, C ]) = ( C, [ А, B ]) = ( B, [ C, А ]), т.е. при циклической перестановке входящих в него векторов ( замене А на В, В на С и С на А ) величина смешанного произведения не изменяется. Двойное векторное произведение. A´ (B´ C ) – вектор, компланарный B и C и может быть вычислен по формуле A´ (B´ C) = B(A, C) – C(A, B).
Л Е К Ц И Я - 2
Ч а с т ь - 2 Элементы векторного анализа Скалярное поле. Градиент Скалярное поле. Если в каждой точке некоторой области пространства заданы значения скалярной функции y( r ), говорят, что в этой области задано скалярное поле y( r ) (поле функции y( r )). Важной характеристикой скалярного поля являются так называемые поверхности
Переходя к пределу при Dn ® 0 получаем (для дифференцируемой y):
и, следовательно, среди производных функции по всевозможным направлениям, производная по нормали к поверхности уровня является максимальной. Вектор, направленный в сторону наибольшего изменения y и равный по абсолютному значению его скорости, называется градиентом и обозначается grad y .
где n 0 – единичный вектор нормали n.
Градиент обладает следующими свойствами grad (y + j) = grad y + grad j, grad (y . j) = j grad y + y grad j, grad (y / j) = (j grad y –y grad j)/j2,
С учетом метрических коэффициентов и соответствующих ортов (см. таблицу1) выражение для градиента в декартовой системе координат:
В цилиндрической системе координат:
В сферической системе координат:
Рассмотрим проекцию grad ψ на произвольно выбранное направление I, обозначаемую gradIψ. По определению проекции
где I0 – единичный вектор вдоль I, а поскольку ( I0, n0 )=cosα производная скалярной функции по направлению вектора I. Ротор. Теорема Стокса По определению rot F есть вектор, проекция которого на произвольное направление n выражается следующим образом:
где Δ S – площадка, выбранная так, что n – это нормаль к этой площадке, образующая правовинтовую систему с направлением обхода контура L (если смотреть вдоль вектора n, обход контура L производится по часовой стрелке). Общая формула для вычисления rot F в криволинейных ортогональных координатах имеет вид:
Ротор в декартовой системе координат:
или
В цилиндрической системе координат:
В сферической системе координат:
Свойства ротора: 1) rot( F + A ) = rot F + rot A, 2) rot (m F ) = m rot F, 3) rot(y F ) = y rot F + [grady, F ], где y – скалярная функция координат. 4) rot grad ψ ≡ 0. Потенциальные поля ( F = grad ψ ) являются обязательно «безвихревыми». 5) div rot F ≡ 0 Расходимость вихревого поля равна нулю, т.е. вихревое поле соленоидально. Теорема Стокса.
связывает между собой циркуляцию вектора по одновитковому замкнутому контуру L с потоком ротора того же вектора через произвольную поверхность S, опирающуюся на этот контур.
Л Е К Ц И Я - 3 Потенциальные поля. Определенное в области D векторное поле
Соленоидальные поля. Определенное в области D векторное поле
Функцию Если поле
Ч А С Т Ь - 3 Средние значения Говорят, что величина u(t1) есть «мгновенное значение» функции u(t) для момента t1. Но часто представляет интерес также среднее значение F, под которым понимают
Очевидно, в частности, что для F= u
Уравнения Максвелла Как известно из курса физики, анализ электромагнитных процессов возможен только на основе системы уравнений Максвелла:
совместно с уравнениями состояния или материальными уравнениями: D = ε а E, B = μ а H, j = σ E, где E – вектор напряженности электрического поля; H – вектор напряженности магнитного поля; B – вектор магнитной индукции; D – вектор электрического смещения; j – вектор объемной плотности тока проводимости; ε а и μ а – абсолютные диэлектрическая и магнитные проницаемости среды соответственно; σ – удельная проводимость среды; J ст и ρ ст – объемные плотности сторонних токов и зарядов соответственно, являющихся источниками электромагнитного поля.[1] Переходя к комплексным амплитудам и заменяя дифференцирование по времени на умножение на iω (ω – круговая частота), учитывая уравнения состояния, получаем полную систему уравнений Максвелла для комплексных амплитуд с учетом сторонних источников:
где Таблица 3.1
(n – порядок функции, m – номер корня) Точно так же важны корни производной функции Бесселя Jn' (x) = 0 которые обозначены Anm и сведены в таблицу: Таблица 3.2
(n – порядок функции, m – номер корня)
ФЕДЕРАЛЬНОЕ АГЕНТСТВО СВЯЗИ Московский технический университет связи и информатики _____________________________________________________________ Корнюхин В.И
М О Т э М П
( конспект лекций ) Л Е К Ц И Я - 1 Часть 1 Системы координат
r = x0 x + y0 y + z0 z где: x0, y0, z0 – единичные векторы или орты прямоугольной системы координат. Длина радиус-вектора r (его численное значение или модуль) обозначается как | r | = r = 0P и является функцией
Единичный вектор или орт радиуса вектора r0, направление которого совпадает с направлением r, может быть представлен в виде:
, где
-направляющие косинусы углов между r0 и положительными направлениями осей 0x, 0y, 0z. Расстояние d между точками P1(x1, y1, z1) и P2(x2, y2, z2) равно
Направленный отрезок (вектор P1P2 ) может быть записан в виде: P1P2 = x0 (x2 – x1) + y0 (y2 – y1) + z0 (z2 – z1) Криволинейная ортогональная система координат
x = x’, y = y’, z = z’. При решении конкретных задач, часто оказывается удобнее определять точку в пространстве не как пересечение трех плоскостей, а как пересечение трех произвольных однозначно заданных произвольных поверхностей, которые в общем случае описываются уравнениями: q1(x, y, z) = const, q2(x, y.z) = const и q3(x, y.z) = const, . Для произвольной точки P в системе криволинейных координат устанавливается обозначение P(q1, q2, q3).
Как правило, используются только ортогональные системы координат, т.е. такие, орты которых в любой точке взаимно перпендикулярны.Перемещение точки P (рис. 1.4а) выражается приращением ее радиуса-вектора Δ r. Разлагая дифференциал dr по ортам l1, l2 и l3, имеем: d r = l1 d l1+ l2 d l2+ l3 d l3,
Частные производные радиус-вектора r по координатам – это векторы, параллельные их ортам (рис. 1.4б):
Из сравнения равенств и с учетом последнего, видно, что дифференциалы длины криволинейных координат отличаются от дифференциалов самих координат множителями h1, h2 и h3:
Сведения о декартовой, цилиндрической и сферической системах координат сведены в таблицу 1. Таблица 1
Где: h1, h2 и h3 – коэффициенты Ламе, связывающие дифференциалы длины криволинейных координат с дифференциалами самих координат dli = hidqi Векторы и действия над ними Популярное:
|
Последнее изменение этой страницы: 2016-04-11; Просмотров: 941; Нарушение авторского права страницы
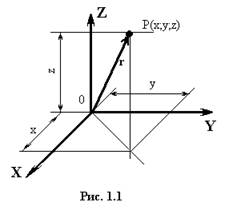 1.1.1Декартова система координат позволяет связать с каждой точкой P пространства три действительных числа ( декартовы координаты )- x (абсцисса), y (ордината), z (аппликата), при этом пишут P(x, y, z). Три взаимно перпендикулярные оси X, Y, Z, проходящие через некоторую точку 0, образуют прямоугольную или ортогональную систему координат.. Каждая точка P(x, y, z) имеет свой радиус-вектор r (рис.1.1), который в прямоугольной декартовой системе координат может быть представлен в виде:
1.1.1Декартова система координат позволяет связать с каждой точкой P пространства три действительных числа ( декартовы координаты )- x (абсцисса), y (ордината), z (аппликата), при этом пишут P(x, y, z). Три взаимно перпендикулярные оси X, Y, Z, проходящие через некоторую точку 0, образуют прямоугольную или ортогональную систему координат.. Каждая точка P(x, y, z) имеет свой радиус-вектор r (рис.1.1), который в прямоугольной декартовой системе координат может быть представлен в виде: 



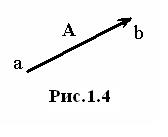 Вектор – отрезок (рис.1.4), имеющий определенную длину и направление (обозначается
Вектор – отрезок (рис.1.4), имеющий определенную длину и направление (обозначается  или A, иногда
или A, иногда  . a – начало, b – конец вектора ). Длина вектора A (модуль или абсолютная величина) обозначается A или |А|. Два вектора считаются равными, если равны их модули, совпадают их направления.
. a – начало, b – конец вектора ). Длина вектора A (модуль или абсолютная величина) обозначается A или |А|. Два вектора считаются равными, если равны их модули, совпадают их направления.


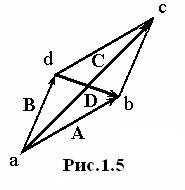 С у м м а двух векторов A и B – диагональ ac (вектор С) параллелограмма построенного на этих векторах (рис.1.5). Разностью A–B называется сумма векторов A и( –B) (диагональ db параллелограмма на рис.1.5).
С у м м а двух векторов A и B – диагональ ac (вектор С) параллелограмма построенного на этих векторах (рис.1.5). Разностью A–B называется сумма векторов A и( –B) (диагональ db параллелограмма на рис.1.5).

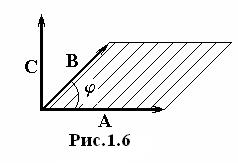 Векторное умножение векторов. Векторным произведением векторов A и B называют вектор C модуль, которого равен площади параллелограмма S, построенного на этих векторах, а направление перпендикулярно плоскости этого параллелограмма и определяется правилом буравчика (правилом правого винта) при повороте от первого вектора ко второму по кратчайшему пути (рис. 1.6). Векторное произведение принято обозначать одним из следующих способов:
Векторное умножение векторов. Векторным произведением векторов A и B называют вектор C модуль, которого равен площади параллелограмма S, построенного на этих векторах, а направление перпендикулярно плоскости этого параллелограмма и определяется правилом буравчика (правилом правого винта) при повороте от первого вектора ко второму по кратчайшему пути (рис. 1.6). Векторное произведение принято обозначать одним из следующих способов:  .
.
 уровня (или изоповерхности), на которых y( r ) = const.
уровня (или изоповерхности), на которых y( r ) = const.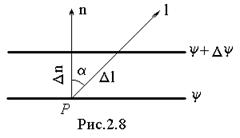 Градиент. Рассмотрим две достаточно близкие поверхности уровня и выделим малую область поля, в которой участки этих поверхностей с нужной степенью точности не отличаются от параллельных плоскостей. Пусть разность значений функции y( r ), принимаемых ею на выделенных поверхностях уровня, равна Dy. На рис.2.8, где следы этих поверхностей показаны в виде двух прямых, построены также два направления: нормаль n к поверхностям и некоторое произвольное направление l. Поскольку расстояние между плоскостями по нормали – кратчайшее и Dn = Dl cosa, то очевидно
Градиент. Рассмотрим две достаточно близкие поверхности уровня и выделим малую область поля, в которой участки этих поверхностей с нужной степенью точности не отличаются от параллельных плоскостей. Пусть разность значений функции y( r ), принимаемых ею на выделенных поверхностях уровня, равна Dy. На рис.2.8, где следы этих поверхностей показаны в виде двух прямых, построены также два направления: нормаль n к поверхностям и некоторое произвольное направление l. Поскольку расстояние между плоскостями по нормали – кратчайшее и Dn = Dl cosa, то очевидно

 .
.



 ,
,  .
. .
. .
. ,
,  называют потенциальным, если существует скалярная функция
называют потенциальным, если существует скалярная функция  такая, что
такая, что

 называют соленоидальным или трубчатым, если существует вектор – функция
называют соленоидальным или трубчатым, если существует вектор – функция  , такая что
, такая что
 соленоидальное и его векторный потенциал равен
соленоидальное и его векторный потенциал равен  , то
, то
 .
.


 и
и  – комплексные амплитуды напряженностей электрического и магнитного полей, соответственно,
– комплексные амплитуды напряженностей электрического и магнитного полей, соответственно,  и
и  – комплексные амплитуды объемной плотности сторонних токов и зарядов,
– комплексные амплитуды объемной плотности сторонних токов и зарядов,  комплексные диэлектрическая и магнитная проницаемости, δ m – угол магнитных потерь.
комплексные диэлектрическая и магнитная проницаемости, δ m – угол магнитных потерь.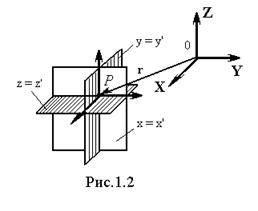 В декартовой прямоугольной системе координат положение в пространстве некоторой точки P(x’, y’, z’) определяется пересечением трех взаимно перпендикулярных координатных плоскостей (рис.1.2)
В декартовой прямоугольной системе координат положение в пространстве некоторой точки P(x’, y’, z’) определяется пересечением трех взаимно перпендикулярных координатных плоскостей (рис.1.2)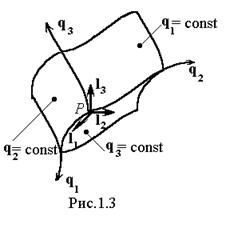 В каждой точке можно рассматривать единичные векторы (орты), касательные координатным линиям и направленные в сторону возрастания соответствующих координат. Будем обозначать их символами l1, l2, l3 (рис.1.3).
В каждой точке можно рассматривать единичные векторы (орты), касательные координатным линиям и направленные в сторону возрастания соответствующих координат. Будем обозначать их символами l1, l2, l3 (рис.1.3). где d l1, d l2 и d l3 – дифференциалы длины по соответствующим криволинейным координатам. С другой стороны:
где d l1, d l2 и d l3 – дифференциалы длины по соответствующим криволинейным координатам. С другой стороны: 
 dl1 = h1dq1, dl2 = h2dq2 и dq3 = h3dq3.
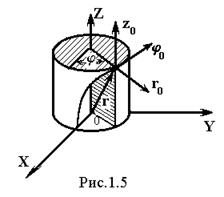
dl1 = h1dq1, dl2 = h2dq2 и dq3 = h3dq3.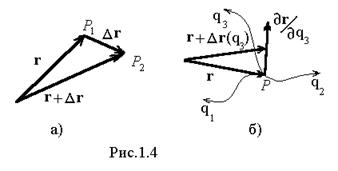 Эти множители называются метрическими коэффициентами, или коэффициентами Ламэ. Цилиндрическая система координат получила свое название от одной из координатных поверхностей, представляющей собой бесконечный круговой цилиндр с радиусом r. Вторая координатная поверхность – полуплоскость, ограниченная осью цилиндра. Третья координатная поверхность – плоскость перпендикулярная оси цилиндра (рис.1.5). Координатные линии цилиндрической системы координат: r – линия пересечения полуплоскости, проходящей через ось Z с плоскостью перпендикулярной оси Z, j – линия пересечения кругового цилиндра с плоскостью перпендикулярной оси Z, z – линия пересечения кругового цилиндра с плоскостью, проходящей через ось цилиндра (образующая цилиндра). Цилиндрические координаты: r (радиус); j (полярный угол); z (аппликата).Орты r 0, j 0, z 0 образуют правую тройку векторов. Элемент цилиндрической поверхности dS =rdjdz. Элемент объема dV = r dr d
Эти множители называются метрическими коэффициентами, или коэффициентами Ламэ. Цилиндрическая система координат получила свое название от одной из координатных поверхностей, представляющей собой бесконечный круговой цилиндр с радиусом r. Вторая координатная поверхность – полуплоскость, ограниченная осью цилиндра. Третья координатная поверхность – плоскость перпендикулярная оси цилиндра (рис.1.5). Координатные линии цилиндрической системы координат: r – линия пересечения полуплоскости, проходящей через ось Z с плоскостью перпендикулярной оси Z, j – линия пересечения кругового цилиндра с плоскостью перпендикулярной оси Z, z – линия пересечения кругового цилиндра с плоскостью, проходящей через ось цилиндра (образующая цилиндра). Цилиндрические координаты: r (радиус); j (полярный угол); z (аппликата).Орты r 0, j 0, z 0 образуют правую тройку векторов. Элемент цилиндрической поверхности dS =rdjdz. Элемент объема dV = r dr d  dz.
dz.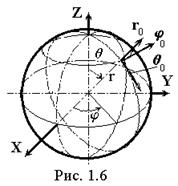 1.1.3 Сферическая система координат получила свое название от одной из координатных поверхностей, представляющей собой сферу радиусом r. Вторая координатная поверхность конус с вершиной, расположенной в начале системы координат и углом вершины равным 2q. Третья – полуплоскость, ограниченная осью Z (рис.1.6). Координатные линии сферической системы координат: r– линия пересечения поверхности конуса с плоскостью, проходящей через ось Z, q – образована пересечением сферы радиуса r с плоскостью, проходящей через ось Z, j– образована пересечением поверхностей сферы и конуса. Сферические координаты: r (радиус); q (меридиональный угол); j (азимутальный угол). Орты r 0, q 0, j 0 образуют правую тройку векторов. Элемент сферической поверхности dS = r2 sinq dq dj. Элемент объема dV = r2 sinq dr dq dj.
1.1.3 Сферическая система координат получила свое название от одной из координатных поверхностей, представляющей собой сферу радиусом r. Вторая координатная поверхность конус с вершиной, расположенной в начале системы координат и углом вершины равным 2q. Третья – полуплоскость, ограниченная осью Z (рис.1.6). Координатные линии сферической системы координат: r– линия пересечения поверхности конуса с плоскостью, проходящей через ось Z, q – образована пересечением сферы радиуса r с плоскостью, проходящей через ось Z, j– образована пересечением поверхностей сферы и конуса. Сферические координаты: r (радиус); q (меридиональный угол); j (азимутальный угол). Орты r 0, q 0, j 0 образуют правую тройку векторов. Элемент сферической поверхности dS = r2 sinq dq dj. Элемент объема dV = r2 sinq dr dq dj.