|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Адаптация структурной схемы к условиям, обеспечивающим достоверную симуляцию рабочих процессов
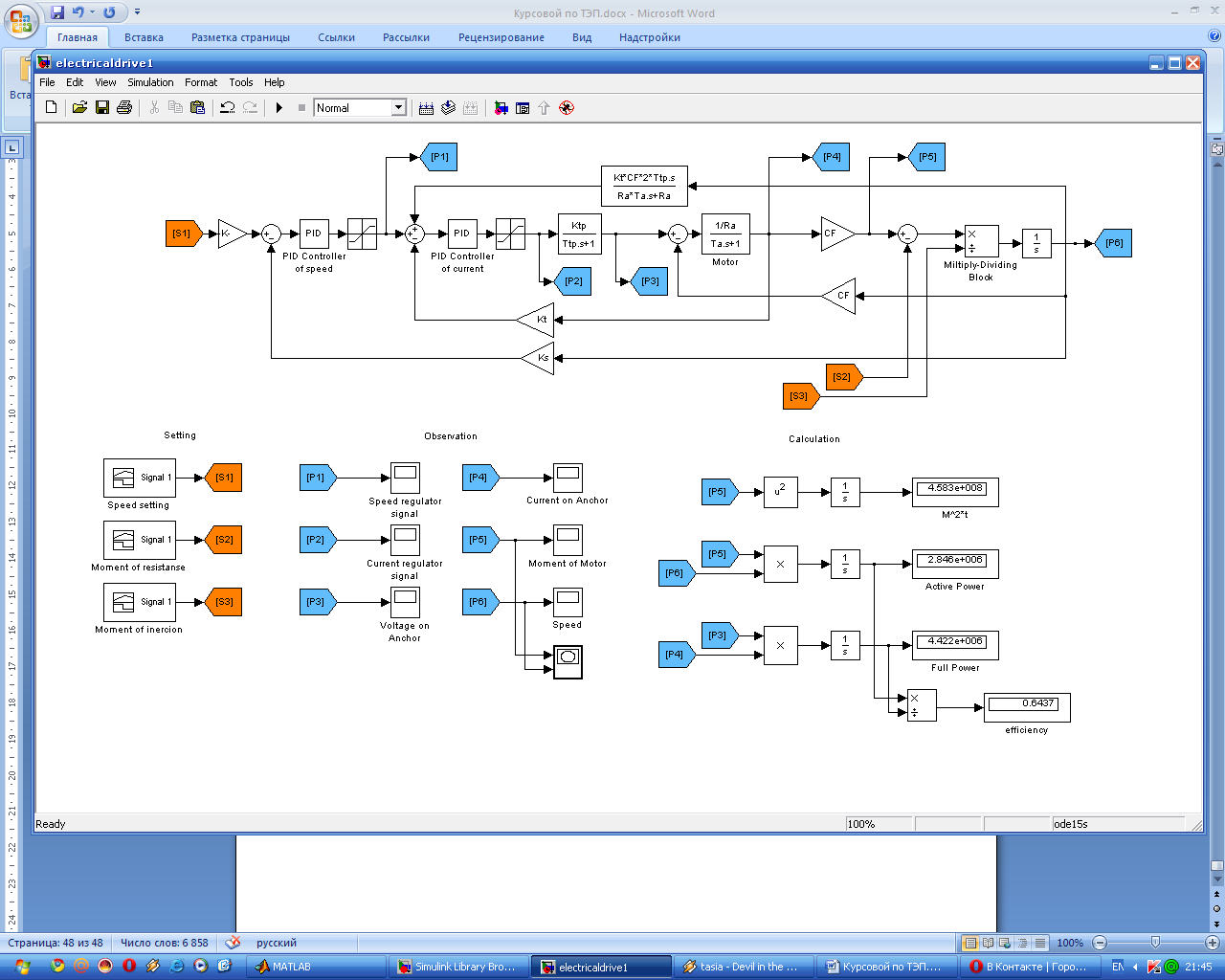
Структурную схему электропривод доработаем, опираясь на ранее приведённые структурные схемы системы автоматического регулирования, однако дополним её элементами, имитирующими нагрузку и формирующими сигнал задания. Предварительный вид структурной схемы изображён на рис. 23. Изобразим её, дополнив необходимыми пояснениями:
Рис. 25. Исходная структурная схема электропривода
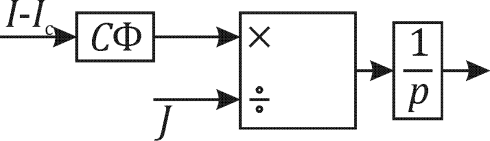
Передаточные функции регуляторов получены в предыдущих разделах, а сами регуляторы моделируются специальным блоком (PID Controller), поэтому не смысла приводить их здесь. В этой схеме не моделируется изменение момента инерции при различных направлениях потока энергии, а поэтому блок с передаточной функцией
должен быть заменён на такой:
Рис. 26. Блок, учитывающий изменение входной величины Также следует учитывать, что регуляторы напряжения выполнены на операционных усилителях, поэтому подача на вход слишком большого по величине сигнала может привести их в негодность, а также повредить СИФУ. Чтобы этого не произошло, на выход каждого регулятора устанавливается нелинейный элемент типа «насыщение» («ограничение»), чтобы ограничить выходной сигнал на значении 10 В. Конечный вариант структурной схемы, учитывающий внесённые изменения представлен на рисунке 25:
Рис. 27. Усилители с коэффициентом усиления 2 использованы для того, чтобы показать реальные усилия и моменты инерции, которые действуют на входном валу редуктора, а не на валах двигателей. После разработки структурной схемы можно приступать к моделированию переходных процессов.
Построение переходных процессов одного цикла работы электропривода
При построении переходных процессов на задающий вход системы автоматического регулирования подаётся сигнал, соответствующий тахограмме, а на возмущающий вход системы – сигнал, соответствующий нагрузочной диаграмме. Задания сигналов формируются в области задания структурной схемы:
Рис. 28. Область задания структурной схемы Изобразим сигналы задания:
Рис. 29. Сигнал задания скорости (выход задатчика интенсивности)
Рис. 30. Сигнал, задающий момент сопротивления (синхронизирован с тахограммой)
Рис. 31. Сигнал, задающий момент инерции (синхронизирован с тахограммой)
Построим следующие графики переходных процессов: · угловая скорость вращения двигателей; · напряжение на выходе тиристорного преобразователя; · токи якорей двигателя №1 и двигателя №2; · моменты на якорях двигателя №1 и двигателя №2 (с учётом динамического); · осциллограмма двигателя №1 и двигателя №2.
Рис. 32. Угловая скорость вращения двигателей (вырезки на основном графике показаны красными прямоугольниками)
Рис. 33. Напряжение на выходе тиристорного преобразователя
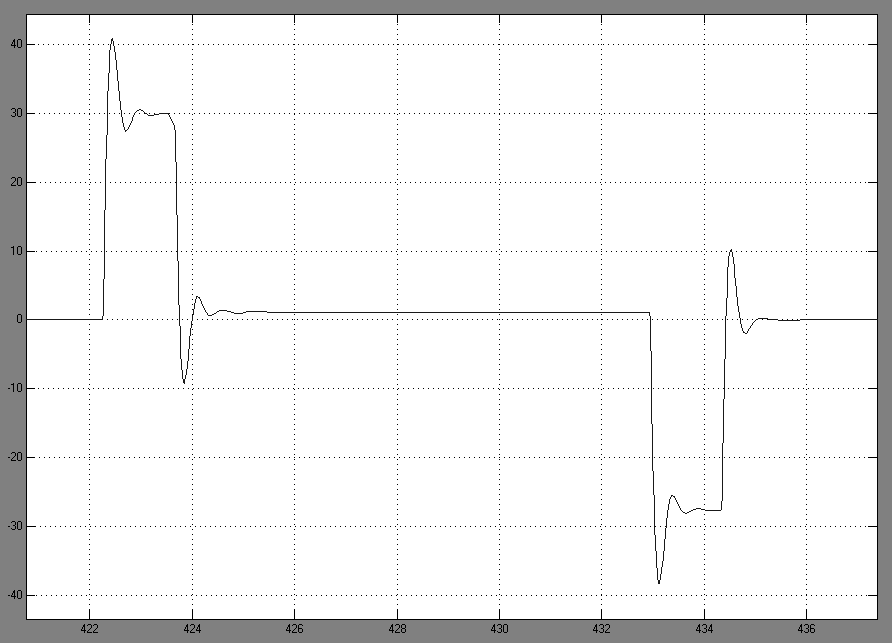
Рис. 34. Ток на якоре двигателя №1. Хорошо видна колебательность переходных процессов, объясняемая наличием достаточного числа инерционностей в системе автоматического управления. Перерегулирование составляет 43 %, т. к. система настроена на симметричный оптимум.
Рис. 35. Ток на якоре двигателя №2. Полное подобие с предыдущим графиком достигается за счёт того, что двигатели абсолютно одинаковы, следовательно при одинаковом напряжении на якоре и равномерно распределённой нагрузке графики тока будут абсолютно одинаковы.
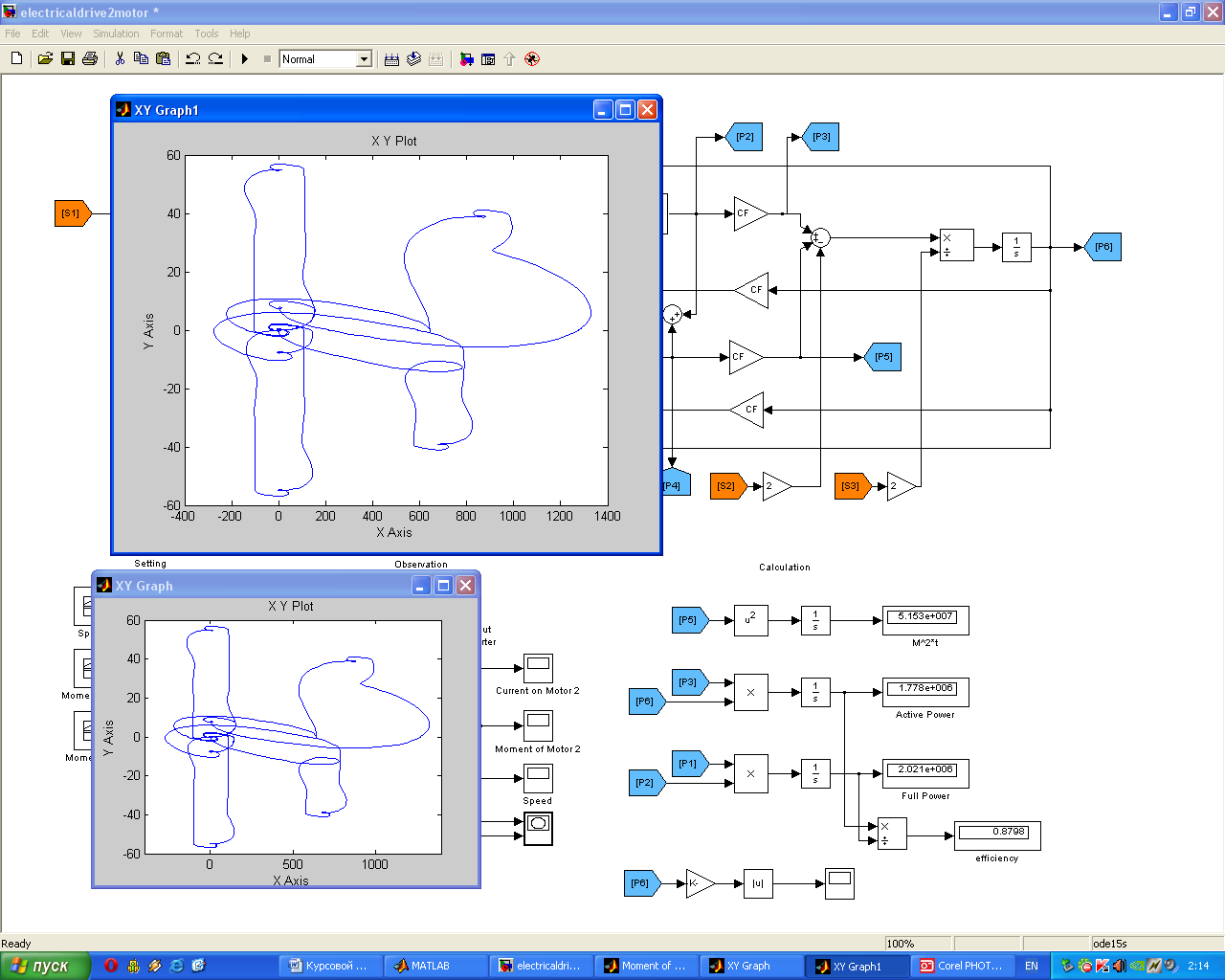
Рис. 36. Момент на валу двигателя №1. Так как двигатель работает в первой зоне регулирования (на скоростях меньших либо равных номинальным), то момент на валу пропорционален току якоря и отличается от него в СФ (3, 768) раз, поэтому детализация графика здесь будет излишней. Этот же график справедлив и для момента на валу двигателя №2. Рис. 37. Осциллограмма цикла (динамическая электромеханическая характеристика) работы двигателя №1 (вверху) и двигателя №2 (внизу). Равенство скоростей объясняется жёсткой механической связью валов двигателей между собой (посредством вала редуктора), А равенство моментов – идеализированной идентичностью двигателей между собой.
Популярное:
|
Последнее изменение этой страницы: 2016-05-28; Просмотров: 1018; Нарушение авторского права страницы