|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Сложение пар. Условия равновесия пар ⇐ ПредыдущаяСтр 8 из 8
Рассмотрим первоначально систему пар лежащих в одной плоскости. Теорема: Система пар, лежащих в одной плоскости, эквивалентна одной паре, лежащей в той же плоскости и имеющей момент, равный алгебраической сумме моментов слагаемых пар. Пусть на тело действуют три пары сил с моментами Используя теорему об эквивалентности пар, заменяем эти пары эквивалентными другими парами
Сложив отдельно силы получим:
Вся система заменится одной парой
Обобщая эту формулу на n-пар получим:
Для равновесия плоской системы пар необходимо и достаточно, чтобы алгебраическая сумма моментов этих пар была равна нулю:
При сложении пар в пространстве достаточно будет рассмотреть две пары. Теорема: Любая система пар, действующая на твердое тело, эквивалентна одной паре с моментом, равным геометрической сумме моментов слагаемых пар.
Итак, пусть даны две пары с моментами m1 и m2, лежащие в плоскостях I и II (рис. 27 Складываем силы в точках А и В:
и убеждаемся, что пары
Если на тело действует л пар с моментами
Геометрически вектор Если векторы
Условия равновесия твердого тела под действием пространственной системы пар, запишутся:
38. Из второго закона динамики материальной точки
- дифференциальные уравнения движения точки на плоскости
где Первой называется задача, в которой заданы масса точки и закон ее движения в декартовых или естественных осях. Необходимо определить модуль и направление силы, действующей на точку. Для решения следует выполнить следующие операции: - построить расчетную схему, на которой в соответствии с условием задачи изобразить систему осей координат, нарисовать траекторию точки и отметить на траектории то положение точки, для которого требуется найти действующую силу. Эту силу следует представить составляющими на выбранные ос координат; - по заданному движению материальной точки определить проекции ее ускорения на принятые оси координат; - составить дифференциальные уравнения движения точки в форме (1.2) или (1.3). Из полученных уравнений определить проекции искомой силы, а затем ее модуль и направляющие косинусы. Рассмотрим пример выполнения теста 1. «Материальная точка М массой
Решение Строится расчетная схема. В соответствии с условием задачи принимается декартовая система координат. Из заданных уравнений движения следует, что траекторией точки является парабола Положение точки в момент
М1 (0, 5; -0, 5). Искомую силу представим составляющими Вычислим проекции ускорения точки на оси координат
Для заданного момента
Из дифференциальных уравнений (1.2) находим
Затем определяем модуль силы
и направляющие ее косинусы
39. Моментом инерции механической системы относительно неподвижной оси («осевой момент инерции») называется величинаJa, равная сумме произведений масс всех n материальных точек системы на квадраты их расстояний до оси:
· mi — масса i-й точки, · ri — расстояние от i-й точки до оси. Осевой момент инерции тела Ja является мерой инертности тела во вращательном движении вокруг оси подобно тому, какмасса тела является мерой его инертности в поступательном движении.
где: dm = ρ dV — масса малого элемента объёма тела dV, ρ — плотность, r — расстояние от элемента dV до оси a. Если тело однородно, то есть его плотность всюду одинакова, то
Теорема Гюйгенса — Штейнера[править | править вики-текст] Основная статья: Теорема Гюйгенса — Штейнера Момент инерции твёрдого тела относительно какой-либо оси зависит от массы, формы и размеров тела, а также и от положения тела по отношению к этой оси. Согласно теореме Штейнера (теореме Гюйгенса-Штейнера), момент инерции тела J относительно произвольной оси равен сумме момента инерции этого тела Jcотносительно оси, проходящей через центр масс тела параллельно рассматриваемой оси, и произведения массы тела m на квадрат расстояния d между осями:
где m — полная масса тела. Например, момент инерции стержня относительно оси, проходящей через его конец, равен:
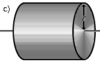
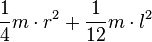
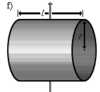
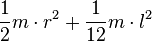
Осевые моменты инерции некоторых тел[править | править вики-текст]
40. Центробежными моментами инерции тела по отношению к осям прямоугольной декартовой системы координат называются следующие величины:
где x, y и z — координаты малого элемента тела объёмом dV, плотностью ρ и массой dm. Ось OX называется главной осью инерции тела, если центробежные моменты инерции Jxy и Jxz одновременно равны нулю. Через каждую точку тела можно провести три главные оси инерции. Эти оси взаимно перпендикулярны друг другу. Моменты инерции тела относительно трёх главных осей инерции, проведённых в произвольной точке O тела, называются главными моментами инерции данного тела. Главные оси инерции, проходящие через центр масс тела, называются главными центральными осями инерции тела, а моменты инерции относительно этих осей — его главными центральными моментами инерции. Ось симметрии однородного тела всегда является одной из его главных центральных осей инерции.
41. 1.2. Метод Даламбера (метод бегущих волн, метод характеристик)
Рассмотрим неограниченную струну и зададим начальные условия:
Интегрируя это равенство по η при фиксированном ξ, получим: Вернемся к старой переменной:
Функция (3) является общим интегралом уравнения (1). Теперь необходимо удовлетворить начальным условиям (2):
Интегрируя (5), получим:
Из равенств (4) и (6) находим
Выражения (7), (8) подставляем в (3).
42. В динамике связи можно учесть с помощью введения сил реакции связей. Силы реакции связей Силы реакции связей заранее неизвестны и определяются во время интегрирования уравнений движения. Поэтому при наличии связей решение задач механики с помощью уравнений второго закона Ньютона усложняется тем, что необходимо интегрировать больше уравнений, чем число степеней свободы, и тем, что приходится определять силы реакции связей. Вначале рассмотрим случай, когда материальные точки покоятся. Это возможно, если сумма сил, действующих на каждую материальную точку, равна нулю: Введем понятие виртуального перемещения. Виртуальное перемещение — это мысленное бесконечно малое перемещение, которое в данный момент времени материальная точка может совершить, не нарушая связей. Чтобы отличать виртуальные перемещения от реальных перемещений материальных точек, будем обозначать их греческой буквой Первое слагаемое в (2.7) представляет работу активных сил на виртуальных перемещениях. Это — работа, которую совершили бы активные силы, если бы эти перемещения произошли. Ее называют Виртуальной работой активных сил. Соответственно второе слагаемое в (2.7) дает виртуальную работу сил реакции связей. Существует большое количество связей, для которых виртуальная работа сил реакции связей равна нулю. Такие связи называются Идеальными связями. Идеальными являются связи, осуществляемые нерастяжимыми нитями и в пренебрежении сил трения связи, обеспечиваемые твердыми телами. Для идеальных связей второе слагаемое в равенстве (2.7) равно нулю. В результате получаем уравнение В отличие от равенства (2.7), которое вследствие выполнения условий равновесия (2.6) представляет собой тождество, выражение (2.8) является уравнением. Так как при наличии связей не все Принцип виртуальных перемещений является основным принципом, применяемым в решении задач статики в механике. Проведенные для статики рассуждения обобщаются и на случай динамики. Для этого необходимо в уравнении (2.5) перенести Если формально ввести силы инерции
Уравнение (2.10) формулируется как Принцип Даламбера: Работа активных сил вместе с силами инерции на виртуальных перемещениях равна нулю. Принцип Даламбера является основным принципом динамики систем материальных точек со связями. В отсутствие связей все
Поскольку вариации обобщенных координат
В системе уравнений (2.13) нет сил реакции связей, и число уравнений равно числу степеней свободы. В дальнейшем во все уравнения будут входить только активные силы, и мы специально не будем отмечать это. 43. Используя понятие массы, можно представить соотношение между силой (причиной) и ускорением (следствием). Если: Основное уравнение динамики
, или в векторной форме
Единица СИ силы:
Сила, определение Силой в один ньютон называется такая сила, которая сообщает телу массой 1 (кг) ускорение 1 (м/с² ).
44. Уравнениями Лагранжа второго рода называют дифференциальные уравнения движения механической системы, получаемые при применении лагранжева формализма. Вид уравнений[править | править вики-текст] Если голономная механическая система описывается лагранжианом
где i = 1, 2, … n (n — число степеней свободы механической системы). Лагранжиан представляет собой разность кинетической и потенциальной энергий системы. Если в системе действуют непотенциальные силы (например, силы трения), уравнения Лагранжа второго рода имеют вид
где Вывод уравнений[править | править вики-текст] Уравнения Лагранжа в механике получаются из законов динамики Эйлера (баланса количества движения и момента количества движения) при определенных ограничениях на систему (в ней должны присутствовать лишь идеальные голономные связи). Для других случаев получаются модификации уравнений Лагранжа. Отметим, что это частный (хотя и очень важный) случай механических систем. Если для рассматриваемой системы применим принцип наименьшего действия, то вывод можно провести иначе. В лагранжевой механике вывод уравнений Лагранжа происходит на основе принципа наименьшего действия. Механическая система может быть описана некой функцией
называемый действием принимает минимальное значение на траектории системы (здесь t1 и t2 — начальный и конечный моменты времени). Заметим, что необходимо доказать применимость принципа наименьшего действия к рассматриваемой системе: далеко не все физические системы ему подчиняются. Применяя к функционалу действию стандартную схему оптимизации, получаем для него уравнения Лагранжа — Эйлера, которые и называются уравнениями Лагранжа второго рода для механической системы. Вывод уравнений для системы с одной обобщенной координатой и скоростью
Изменение действия при переходе из состояния
Разлагая эту разность по степеням
Варьируя это выражение, получаем:
Первое слагаемое заменяется по формуле Ньютона-Лейбница. Второе интегрируем по частям замечая что
Первое слагаемое равно нулю исходя из самой первой формулы вывода. Второе слагаемое может быть равно нулю только если подынтегральное выражение равно нулю. Оно и является искомым уравнением Лагранжа:
Популярное:
|
Последнее изменение этой страницы: 2016-05-29; Просмотров: 800; Нарушение авторского права страницы
 (рис. 26
(рис. 26  )
) , имеющими общее плечо d и такие же моменты
, имеющими общее плечо d и такие же моменты

 с моментом
с моментом



 заменяются одной парой
заменяются одной парой  этой пары
этой пары
 , то:
, то: 
 лежат в разных плоскостях, то можно ввести систему координат Oxyz и находить
лежат в разных плоскостях, то можно ввести систему координат Oxyz и находить 
 , (1.1)получается следующие дифференциальные уравнения:
, (1.1)получается следующие дифференциальные уравнения:  ,
,  , (1.2)- дифференциальное уравнение движения точки по прямой
, (1.2)- дифференциальное уравнение движения точки по прямой , (1.3)
, (1.3) ,
,  - проекции ускорения
- проекции ускорения  на оси декартовых координат.
на оси декартовых координат. кг движется в горизонтальной плоскости согласно уравнениям
кг движется в горизонтальной плоскости согласно уравнениям  ,
,  , где
, где  - в метрах,
- в метрах,  - в секундах. Определить силу
- в секундах. Определить силу  , действующую на точку в момент
, действующую на точку в момент  с.».
с.». . Она изображена на рисунке 1.1.
. Она изображена на рисунке 1.1. м;
м;  м.
м. и
и  .
. ,
,  .
. м/с2,
м/с2,  м/с2.
м/с2. Рисунок 1.1 – траектория точки
Рисунок 1.1 – траектория точки Н,
Н,  Н.
Н. Н.
Н.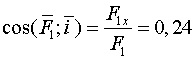 ,
,  .
. , где:
, где:  ,
, 







 [Комм 1]
[Комм 1]















 - уравнение колебаний струны.
- уравнение колебаний струны.
 где
где  -функция, задающая форму струны в начальный момент времени,
-функция, задающая форму струны в начальный момент времени,  -скорость точки струны в начальный момент.
-скорость точки струны в начальный момент.
 , где
, где 

 -некоторая функция только переменной η, то есть
-некоторая функция только переменной η, то есть  не зависит от
не зависит от  .
.
 .
. .
.
 - описывает волну, бегущую направо.
- описывает волну, бегущую направо.  - описывает волну, бегущую налево.
- описывает волну, бегущую налево. .
.
 .
.
 .
.
 наряду с действующими, или активными силами
наряду с действующими, или активными силами  Записывают в правую часть уравнений второго закона Ньютона:
Записывают в правую часть уравнений второго закона Ньютона:  (2.5)
(2.5) (2.6)
(2.6) , то есть виртуальное перемещение материальной точки с индексом
, то есть виртуальное перемещение материальной точки с индексом  обозначим
обозначим  , а реальное бесконечно малое ее перемещение по-прежнему будет обозначаться как
, а реальное бесконечно малое ее перемещение по-прежнему будет обозначаться как  .Домножая равенства (2.6) на
.Домножая равенства (2.6) на  И суммируя по всем материальным точкам системы, получим
И суммируя по всем материальным точкам системы, получим  (2.7)
(2.7) (2.8)
(2.8) . Эти условия по-прежнему выполняются в отсутствие связей, когда
. Эти условия по-прежнему выполняются в отсутствие связей, когда  направо и проделать те же операции, что и в статике. В результате получается уравнение:
направо и проделать те же операции, что и в статике. В результате получается уравнение:  (2.9)
(2.9) , то его можно записать в таком же виде, как уравнение принципа виртуальных перемещений:
, то его можно записать в таком же виде, как уравнение принципа виртуальных перемещений:  . (2.10)
. (2.10) . Эти бесконечно малые изменения обобщенных координат рассматриваются для фиксированного момента времени и называются Вариациями обобщенных координат. Посчитаем дифференциал от выражений (2.2Преобразование от декартовых координат к обобщенным координатам в векторной форме:
. Эти бесконечно малые изменения обобщенных координат рассматриваются для фиксированного момента времени и называются Вариациями обобщенных координат. Посчитаем дифференциал от выражений (2.2Преобразование от декартовых координат к обобщенным координатам в векторной форме:  )при фиксированном
)при фиксированном  . Так как время фиксировано и любое изменение обобщенных координат приводит к изменению
. Так как время фиксировано и любое изменение обобщенных координат приводит к изменению  , совместимых со связями, то полученные бесконечно малые изменения
, совместимых со связями, то полученные бесконечно малые изменения  (2.11)Подставляя выражения для
(2.11)Подставляя выражения для  . (2.12)
. (2.12) (2.13)
(2.13) (
(  — обобщённые координаты, t — время, точкой обозначено дифференцированиепо времени) и в системе действуют только потенциальные силы, то уравнения Лагранжа второго рода имеют вид
— обобщённые координаты, t — время, точкой обозначено дифференцированиепо времени) и в системе действуют только потенциальные силы, то уравнения Лагранжа второго рода имеют вид

 — кинетическая энергия системы,
— кинетическая энергия системы,  — обобщённая сила.
— обобщённая сила.

 в
в