|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Определение поправки секстанта измерением высоты Солнца в момент его кульминации.
Этот способ основан на сравнении вычисленной высоты Солнца с измеренной высотой в момент его кульминации. Рассмотрим порядок определения поправки секстанта измерением высоты Солнца в момент его верхней кульминации. Для этого необходимо определить гринвичский часовой угол Солнца в момент его верхней кульминации. Известно, что в момент верхней кульминации светила его местный часовой угол равен 360°. Зная местный часовой угол и долготу наблюдателя, можно найти гринвичский часовой угол и определить момент верхней кульминации Солнца по поясному декретному времени. Выписать из ААЕ склонение Солнца для момента верхней кульминации и вычислить его высоту по формуле
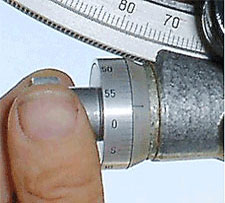
В момент кульминации произвести несколько измерений высоты Солнца секстантом. Так как высоты светил около кульминации изменяются очень медленно, то измерения высот производят за две минуты до кульминации и две — после. Затем определить среднее значение измеренной высоты Солнца и исправить измеренную высоту за рефракцию Определить поправку секстанта по формуле
Рассмотренный способ определения поправки секстанта достаточно прост и обеспечивает необходимую точность, однако он имеет существенный недостаток, особенно ощутимый в светлое время суток, т. е. его нельзя применять в любое время. При определении поправки секстанта по измерениям высоты кульминирующей Луны или планеты момент кульминации определяется так же, как и для Солнца, т. е. по значению гринвичского часового угла этих светил в момент кульминации. При определении поправки секстанта по звездам определение момента кульминации производится по звездному времени в момент кульминации выбранной звезды. В этом случае расчеты несколько отличаются от расчетов, производимых при определении поправки по Солнцу. Определение поправки секстанта прокладкой астрономических линий положения. Этот способ основан на определении удаления астрономических линий положения, проложенных на карте, от места наблюдателя.
Рис. 8.1. Определение поправки секстанта прокладкой АЛП Зная свое местонахождение, штурман в любой момент времени измеряет высоты двух-трех светил (ночью), а днем несколько раз подряд измеряет высоту Солнца. Затем по времени и измеренным высотам производит расчет и прокладку АЛП на карте (рис. 8.1). Если поправка секстанта равна нулю, то все АЛП пройдут через место наблюдателя. Если же поправка секстанта не равна нулю, то все линии положения сместятся относительно места наблюдателя или в направлении ГМС, или в направлении, противоположном ему. Величина удалений АЛП от места наблюдателя измеряется на карте по перпендикулярам к АЛП. Поправка секстанта в этом случае будет равна среднему арифметическому значению из полученных удалений АЛП от места наблюдателя, выраженному в минутах дуги, т. е.
Знак поправки определяется по положению АЛП относительно места наблюдателя и ГМС. Если АЛП и ГМС находятся по одну сторону от места наблюдателя, то поправка отрицательная, а если по разные стороны, то положительная. Преимуществом этого способа определения поправки секстанта является то, что применять его можно практически в любое время суток. Недостатком способа является громоздкость расчетов и зависимость точности определения поправки секстанта от графической работы на карте.
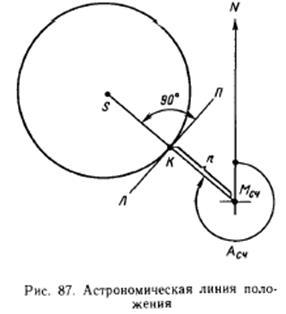
Астрономические способы определения места судна предусматривают использование высотных линий положения. Основная идея обсервации места судна методом линий положения заключается в следующем. Каждое светило проецируется на поверхность земли и проекция называется полюсом освещенности. Географические координаты полюса освещенности φ и λ (на поверхности земли) определяются координатами светила на небесной сфере, т.е. его склонением δ и гринвичским часовым углом tгр, причем широта φ полюса освещенности равна склонению светила δ, а долгота λ – его гринвичскому часовому углу tгр, φ = δ и λ = tгр. Полюса освещенности можно рассматривать как навигационные ориентиры с известными координатами, поэтому их можно использовать для определения места судна. Если измеряется высота светила над плоскостью истинного горизонта, то зенитное расстояние (90° – высота) определяет на поверхности земли изолинию, на которой находится судно, причем изолиния представляет собой окружность, центром которой является полюс освещения светила, а радиусом – зенитное расстояние, выраженное в милях. Таким образом, если измерить высоты нескольких светил, то можно получить их изолинии, в точке пересечения которых находится обсервованное место судна (аналогично обсервации по расстояниям нескольких ориентиров). Положение полюсов освещенности светил, в отличие от береговых ориентиров, изменяется, поэтому при измерении высоты светила необходимо фиксировать момент времени для определения координат полюса освещенности. Второй особенностью астрономических наблюдений является то, что радиусы изолиний, равные зенитным расстояниям, в общем случае достаточно большие, чем затрудняется построение изолиний относительно полюсов освещенности. Так, при высоте светила 45° радиус изолинии относительно полюса освещенности равен 2700 миль, а при высоте 60° - равен 1800 миль. Поэтому, если высоты светил меньше 88°, то использовать полюса освещенности для построения изолиний на карте невозможно. В этом случае применяется способ, заключающийся в замене небольшого участка изолинии прямой линией положения, касательной к изолинии вблизи счислимого места. На рисунке показана сферическая изолиния на меркаторской карте, точка s – полюс освещенности; точка Азимут светила
Величина переноса n является разностью между обсервованной и счислимой высотой светила. Обсервованная высота измеряется с помощью секстана с последующими исправлениями, а счислимая высота рассчитывается по формуле:
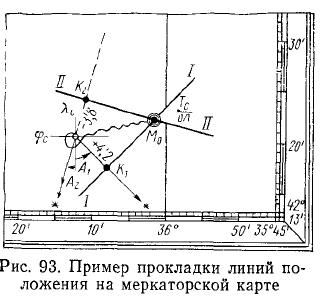
При использовании двух высотных линий положения І-І и ІІ-ІІ, проложенных из счислимой точки перпендикулярно азимутам Прокладка всех линий положения выполняется одинаково: через счислимую точку про водят линию азимута, отмечая стрелкой направление на светило; вдоль этой линии откладывают перенос h0 — hс в сторону светила (если он положителен) или в противоположную (если он отрицателен); через полученную определяющую точку проводят перпендикулярно линии азимута высотную линию положения (ВЛП). Прокладку лучше всего выполнять на карте, на которой ведут счисление, и в том же масштабе. При прокладке на бумаге произвольную точку принимают счислимой, от нее откладывают по линиям азимутов переносы в одинаковом масштабе и в том же масштабе измеряют разность широт Δ φ и отшествие Δ ω между счислимой и обсервованной точками, а также величину невязки С между ними. Величину Δ ω переводят в разность долгот Δ λ = Δ ω *secφ с (табл. 25-а МТ—75) и вычисляют обсервованные координаты: φ 0 = φ с + Δ φ λ 0 = λ с + Δ λ В широтах до 70° часто пользуются угловым масштабом: строят угол, равный счислимой широте, вдоль его наклонной шкалы выбирают масштаб расстояний, по которому измеряют h0 — hс, Δ φ и С, а проекция этой шкалы на горизонтальную сторону угла дает шкалу измерения Δ λ. При определениях по двум светиламобсервованное место принимают в точке пересечения их линий положения. Средняя квадратическая погрешность места М зависит от разности азимутов Δ А = А2 — А светил по формуле Каврайского:
где ε h и σ h — средние квадратические значения случайных и повторяющихся погрешностей высот. Круг радиуса.V/c центром в обсервованной точке содержит действительное, место с вероятностью 63—68%. Если радиус этого круга увеличить вдвое, то вероятность захвата им действительного места возрастает примерно до 95%. Популярное:
|
Последнее изменение этой страницы: 2016-05-30; Просмотров: 1047; Нарушение авторского права страницы

 .
.





 есть учетверенный измеренный радиус Солнца, который необходимо сравнить с учетверенным радиусом Солнца, выбранным из МАЕ R
есть учетверенный измеренный радиус Солнца, который необходимо сравнить с учетверенным радиусом Солнца, выбранным из МАЕ R 
 - счислимое место судна;
- счислимое место судна;  - азимут светила, т.е. направление из счслимой точки на полюс освещенности. Переносом n=
- азимут светила, т.е. направление из счслимой точки на полюс освещенности. Переносом n=  ,
,  , склонением δ и гринвичским часовым углом tгр с помощью формулы сферической тригонометрии:
, склонением δ и гринвичским часовым углом tгр с помощью формулы сферической тригонометрии:  .
.
 и
и  с заданными переносами (на рис. +4, 2 и -3, 6) обервованная точка
с заданными переносами (на рис. +4, 2 и -3, 6) обервованная точка  находится на пересечении линий положения.
находится на пересечении линий положения.