|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Основные теоретические положения к задаче №5
Мощность Р1, потребляемая двигателем из сети, складывается из полезной мощности на валу двигателя Р2Ни величины потерь в двигателе DР. Р1 = Р2Н + DР, кВт. Эти потери состоят из электрических потерь в обмотках статора и ротора, потерь на перемагничивание стали и механических потерь, определяющих КПД двигателя η в номинальном режиме: Мощность, потребляемая двигателем в номинальном режиме определяется формулой Частота вращения поля статора асинхронного двигателя п1 (синхронная частота вращения) прямо пропорциональна частоте сети f и обратно пропорциональна числу пар полюсов р: G Внимание! В эту формулу следует подставлять не число полюсов 2р, а число пар полюсов р (т.е. в два раза меньше заданного числа полюсов). Скольжение двигателя S характеризует степень отставания частоты вращения ротора п2 от частоты вращения поля статора п1: Номинальным режимом называют режим работы двигателя, когда при номинальных (определенных паспортом двигателя) значениях напряжения питания U1 = UЛ, частоты тока статора, равной частоте сети f и номинальном моменте нагрузке на валу МН, ротор двигателя развивает номинальную частоту вращения п2Н, об/мин. Поэтому скольжение в номинальном режиме Угловая скорость вращения ротора w2Н связана с его частотой вращения п2Н (в номинальном режиме): Активная мощность Р1Н, потребляемая из сети трехфазным асинхронным двигателем в номинальном режиме, определяется выражением: Следовательно, номинальный ток двигателя I1Н Кратность пускового тока КI определяет отношение пускового тока I1П к току двигателя в номинальном режиме I1Н КI = I1П/I1Н. Из этой формулы можно определить пусковой ток двигателя I1П. При номинальной полезной мощности Р2Н ( мощности на валу ) двигатель развивает на валу номинальный вращающий момент МН Пусковой момент МП и максимальный момент ММ определяются из соответствующей кратности пускового момента КП = МП/МН и кратности максимального момента КМ = ММ/МН, которая определяет перегрузочную способность двигателя. Критическое скольжение двигателя SКР, соответствует критическому (максимальному) моменту ММ, развиваемому двигателем и приближенно рассчитывается по формуле Для построения механической характеристики М(S), определяемой зависимостью вращающего момента М от скольжения S, следует использовать характерные точки на кривой, связанные с режимом работы двигателя:
Помимо этих точек для вычерчивания кривой механической характеристики следует задаться пятью дополнительными значениями скольжения, которые определяется через величину критического скольжения: S1 = 0, 1SКР; S2 = 0, 3SКР; S3 = 0, 4SКР; S4 = 0, 6SКР; S5 = 0, 8SКР. Для этих значений скольжения нужно определить соответствующие вращающие моменты с помощью приближенной формулы: Здесь текущий индекс i = 1, 2, 3, 4, 5. Далее следует свести рассчитанные значения скольжений и моментов в таблицу 1.7 и по полученным данным построить механическую характеристику М(S). Механическая характеристика строится в координатных осях Ось абсцисс должна иметь равномерную шкалу для скольжений S от нуля (начало координат, соответствующее режиму идеального холостого хода) до единицы – режим пуска. На шкале оси ординат (шкала моментов) выбор цены деления (в единицах – Нм) из десяти делений зависит от полученной в расчете величины максимального момента ММ. Верхний предел шкалы моментов выбирается из любого числа следующего ряда чисел: 1; 2; 2, 5; 5, или из кратного этому числу (умноженному на 10 в положительных или отрицательных степенях целых чисел). При этом следует исходить из того, что координатная точка максимального момента (ММ, SКР) должна по возможности находится вблизи верхней границы координатной сетки. В качестве примера допустим, что расчетная величина максимального момента ММ составляет 38, 2 Нм. Устанавливаем верхнее значение шкалы моментов – 50 Нм. При этом цена одного деления шкалы при десяти делениях на оси моментов М будет составлять 50/10=5 Нм/дел.
Equation.DSMT4
Таблица 1.7Equation.DSMT4
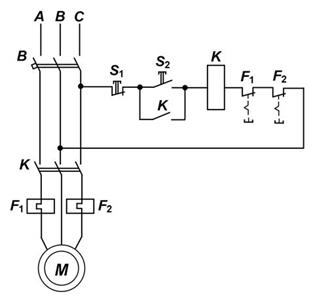
На построенной механической характеристике следует выделить характерные точки, соответствующие пуску, номинальному режиму, максимальному моменту, холостому ходу. На рис. 1.8 представлена электрическая схема управления асинхронным двигателем с применением нереверсивного магнитного пускателя.
Рис. 1.8. Схема управления трехфазным асинхронным двигателем с применением нереверсивного магнитного пускателя Схема управления обеспечивает: пуск и остановку двигателя, защиту его от перегрузки и коротких замыканий, а также защиту двигателя от самозапуска. Схема состоит из силовой цепи и цепи управления. Силовая цепь содержат (по вертикали сверху вниз):
Цепь управления включает в себя (по горизонтали слева направо):
Для пуска трехфазного асинхронного двигателя вначале включают трехполюсный выключатель В и нажимают пусковую кнопку S2, тем самым подключая цепь управления к линиям В и С трехфазной сети (см. рис. 1.8). Через катушку линейного контактора К начинает протекать ток, вызывающий притягивание якоря контактора и замыкание в силовой цепи 3-х главных контактов К линейного контактора. Одновременно с этим замыкается блокировочный контакт К контактора, шунтирующий пусковую кнопку S2 и поэтому эту кнопку можно отпустить. Для отключения двигателя от трехфазной сети и его остановки необходимо нажать кнопку «стоп» S1. При этом цепь управления разомкнется, катушка контактора К будет обесточена, якорь контактора выпадет и разомкнет связанные с ним главные контакты К, тем самым отсоединяя двигатель М от трехфазной сети. Защита трехфазного асинхронного двигателя от длительной перегрузки обеспечивается двумя тепловыми реле, нагревательные элементы F1 и F2 которых включены в две линии силовой цепи, а нормально-замкнутые контакты F1 и F2 тепловых реле включены последовательно в цепь управления. При появлении перегрузки двигателя токи в фазах обмотки статора возрастают, превышая номинальное значение токов I1Н. Допускается превышение тока (1, 1–1, 15)I1Н, на который и настраивают тепловые реле. Нагревательные элементы при прохождении через них повышенных значений токов нагревают и деформируют (изгибают) установленные в реле биметаллические пластины, которые через простую кинематическую связь при изгибе размыкают контакты F1 и F2 тепловых реле. Вследствие этого размыкается цепь управления и затем – главная цепь, отключая перегруженный двигатель от сети. При срабатывании теплового реле (размыкание контактов F1 и F2) его можно через определенное время вернуть в исходное состояние с замкнутыми контактами F1 и F2, нажав на установленную в реле кнопку возврата. Защита от самозапуска заключается в предотвращении самопроизвольного пуска работавшего двигателя после перерыва электропитания и обеспечивается самим линейным контактором. При исчезновении напряжения катушка контактора К в цепи управления обесточивается, размыкаются три главных контакта в силовой цепи К, обесточивая двигатель, размыкается и блокировочный контакт К контактора в цепи управления, шунтировавший пусковую кнопку S2. Поэтому новый пуск двигателя возможен лишь после нажатия этой кнопки оператором. Популярное:
|
Последнее изменение этой страницы: 2016-06-05; Просмотров: 973; Нарушение авторского права страницы
 , %.
, %.
 , кВт.
, кВт. , об/мин.
, об/мин. .
. .
. , рад/с.
, рад/с. , кВт.
, кВт. , А.
, А. , Нм.
, Нм. .
. , Нм.
, Нм.