|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Расчетные динамические схемы грузоподъемных машин.
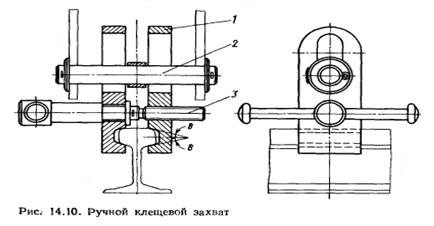
Установлено, что около 80 % отказов современных грузоподъемных машин в основном связано с динамическими нагрузками, которые приводят к повышенному изнашиванию трущихся элементов, усталостному разрушению несущих металлоконструкций и деталей механизмов, появлению недопустимых остаточных деформаций и т. п. Это свидетельствует о важности динамических расчетов, без которых невозможно создание машин с высокими техннко-экономическими показателями. Характерная особенность грузоподъемных машин — значительные нагрузки на механизмы от веса поднимаемого груза и собственного веса крановых металлоконструкций и низкие (по сравнению, например, с транспортными машинами) скорости движения механизмов. Кроме того, для этих машин характерна большая масса движущихся частей, работа в повторно-кратковременном режиме, гибкий подвес груза на канатах и ударное нагружение. Эти и другие факторы повышают роль динамических расчетов при проектировании грузоподъемных машин. Динамические расчеты необходимы не только для определения нагрузок в грузоподъемных машинах. Главное состоит в том, чтобы на основе этих расчетов изменить конструкцию машины и выбрать ее параметры такими, чтобы снижались динамические нагрузки, уменьшалась изнашиваемость трущихся элементов, повышалась долговечность металлоконструкции и механизмов. Динамический расчет начинают с составления расчетной динамической схемы машины и уравнений движения масс, входящих в эту схему. Реальные машины состоят из большого числа соединенных между собой определенным образом элементов, обладающих массой и упругостью, к которым приложены различные по значению и характеру действия внешние нагрузки. С точки зрения динамического расчета грузоподъемная машина представляет собой единую динамическую систему, состоящую из механизмов, несущей металлоконструкции, приводов, кранового рельсового пути и строительной части здания, в котором работает машина. Учесть все взаимодействующие элементы машины в динамическом расчете весьма сложно, а во многих случаях их не следует учитывать, поскольку на формирование динамических нагрузок не все факторы влияют одинаково. От реальной машины к расчетной динамической схеме переходят, пренебрегая теми физическими факторами, которые для конкретного расчетного режима имеют несущественное значение. В общем случае при составлении расчетных динамических схем следует учитывать определяемые свойствами грузоподъемных машин и их расчетных режимов следующие физические факторы: сосредоточенные массы, распределение масс по длине силового элемента, упругую податливость силовых элементов, зависимость движущихся и тормозных усилий двигателей от скорости, изменение усилий механических тормозов во времени, изменение приведенных масс механизмов, зависимость сил трения от скорости и т. д. В каждом конкретном случае динамического расчета одни физические факторы являются главными определяющими, а другие — второстепенными. С одной стороны, это обусловливается объектом расчета, с другой — задачей динамического расчета (его целью). Расчетная динамическая схема, т. е. модель реальной системы, должна удовлетворять двум главным требованиям: во-первых, она должна быть в известной мере адэкватна реальной системе и насколько это возможно отражать с большой подробностью основные физические свойства рассчитываемой системы; во-вторых, расчетная схема должна быть не очень сложной, чтобы решение динамической задачи оказалось бы не слишком трудоемким. Любое усложнение расчетной схемы должно быть оправдано получением более точного решения. С другой стороны, упрощение расчетной схемы не должно приводить к искажению реального физического процесса, который изучается с помощью принятой расчетной схемы. Критерием достоверности принятой расчетной схемы является опыт, сравнение теоретического расчета с результатами эксперимента. Следует подчеркнуть, что эксперимент должен быть поставлен правильно, т. е. отражать те условия работы машины, которые изучаются и сравниваются с результатами теоретического решения. Это касается, например, режимов управления механизмами грузоподъемных машин, физических параметров поднимаемых краном грузов, состоянием рельсового пути крана и т. д. Выбор расчетной схемы—одна из основных задач прикладной динамики. Выбрать наиболее рациональную расчетную схему помогает опыт инженера, его интуиция и умение сопоставить расчетные варианты. Выбор той или иной расчетной схемы определяется также и задачей расчета. Если, например, задачей расчета кранового механизма является определение общих закономерностей движения его в периоды неустановившихся движений, мощности двигателя, времени разгона и торможения механизма, а также ориентировочное определение динамических усилий, передаваемых валами, канатами и т. д., то крановый механизм можно представить как одномассовую вращающуюся или поступательно движущуюся систему, к которой приложены все внешние нагрузки. В такой расчетной схеме не учитываются упругие перемещения отдельных элементов относительно друг друга (двигателя, барабана, муфт, груза и т. д.), т. е. она позволяет определить закон движения центра масс механизма. Расчетные динамические схемы, составленные с учетом упругих деформаций отдельных элементов механизмов, содержат несколько сосредоточенных масс, соединенных между собой упругими связями. Эти схемы могут содержать элементы, масса которых не сосредоточена в какой-то точке, а распределена- по его длине. Отдельными сосредоточенными массами можно считать груз, крановую тележку, ротор двигателя, ходовые колеса и др., а упругими связями — валы, канаты, стержни, балки, стрелы. В расчетных динамических схемах реальные параметры машин (масса, коэффициенты жесткости, податливости и демпфирования скорости и т. п.), э также внешние нагрузки заменяют приведенными величинами для упрощения расчетных уравнений и соотношений. Приведение параметров и нагрузок производят на основании равенства общей энергии реального механизма и энергии приведенной системы. Приведение производится либо к поступательному движению, либо к вращательному движению одной из масс механизма. Экзаменационный билет №34 Противоугонные устройства. Грузоподъемные краны на рельсовом ходу, работающие на открытом воздухе, снабжены противоугонными устройствами, предотвращающими угон крана по рельсовому пути под действием ветровой нагрузки нерабочего состояния крана. Мостовые краны могут быть не снабжены противоугонными устройствами, если при действии на кран ветровой нагрузки нерабочего состояния коэффициент запаса удерживающей силы тормозов механизма передвижения равен не менее 1, 2. По принципу действия противоугонные устройства разделяют на ручные, механические и автоматические. Ручные противоугонные устройства наиболее часто выполняют в виде рельсовых захватов клещевого типа. Удержание крана от угона ветром осуществляется прижатием рычагов с губками к боковым поверхностям рельсов или зажатием их за головку рельса. Наиболее распространенный ручной клещевой захват рис 14.10. Рычаги захвата 1 имеют профилированные губки, охватывающие головку рельса, зажатие которого осуществляется с помощью винта 3. Захват закреплен на ходовой тележке крана с помощью пальца 2, входящего в овальные прорези рычагов. В нерабочем положении рычаги отводятся от головки рельса и поворачиваются губками вверх.
Ручные противоугонные захваты на козловых кранах и мостовых перегружателях применять запрещено. Механические противоугонные устройства выполняют в виде клещевых захватов с электроприводом либо в виде эксцентриковых самозатягивающихся захватов, которые имеют механический привод, в основном электромагнитный. Зажатие головки рельса механического клещевого захвата осуществляется под действием силы Тяжести замыкающего груза, например тяжелого клина, а освобождение рельса происходит с помощью электрического, электрогидравлического или центробежного привода [16].
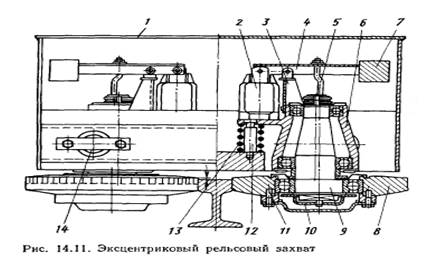
В эксцентриковых механических захватах первоначальное зажатие рельса между двумя эксцентриками происходит под действием усилия пружины или собственного веса. Рельс окончательно зажимается путем самозатягивания эксцентриков. Освобождение рельса осуществляется при включении электромагнита и передвижении крана в направлении, противоположном направлению самозатягивания эксцентриков [1 ]. Управление механическими рельсовыми захватами осуществляется крановщиком из кабины крана. Во избежание резкой остановки крана и возникновения при этом недопустимых динамических нагрузок включение рельсовых захватов должно осуществляться после предварительного торможения крана. Автоматические противоугонные устройства являются наиболее надежными и перспективными для всех типов рельсовых кранов. Они срабатывают при отключении подачи на кран электрической энергии и при скорости ветра, превышающей допустимую. Эти устройства так же, как и механические, выполнены в виде клещевых захватов или в виде эксцентриковых замозатягивающихся рельсовых захватов. Эти устройства отличаются от механических только приводом, обеспечивающим их автоматическое срабатывание. Для примера рассмотрим автоматический рельсовый захват эксцентрикового типа, применяемый в козловых кранах ( 14.11). На каждой из двух опор крана установлено по одному захвату, корпус 1 которого соединен с опорой крана вертикальной осью, благодаря чему он может поворачиваться в горизонтальной плоскости на некоторый угол. В корпусе с помощью горизонтальных цапф 14 закреплено два рычага 6, на концах которых в подшипниках закреплены эксцентриковые оси 9. Нижний конец каждой оси выполнен с шейкой, ось которой смещена относительно оси подшипников, в которых эксцентриковая ось установлена на рычаге. На эксцентриковой шейке оси на подшипниках закреплен ролик 8, боковая поверхность которого (одна половина) имеет насечку. Под действием собственного веса рычага 6 и оси 9 ролик 8 постоянно прижимается к боковой поверхности головки рельса. Для смягчения ударов при проходе рельсовых стыков между рычагом 6 и корпусом установлена пружина 13. Для ограничения угла поворота рычага предусмотрен упор 12. В выключенном состоянии захвата ролик 8 свободно вращается на эксцентриковой оси 9. Захват включается при соединении кулачковой муфты 10, свободно перемещающейся по квадратному хвостовику эксцентриковой оси, с кулачковым кольцом 11, установленным на ролике 8. Кулачковая муфта перемещается по квадрату хвостовика с помощью штока 5, верхний конец которого соединен с двуплечим рычагом 14. Этот рычаг шарнирно закреплен на кронштейне 3, смонтированном на основном рычаге 6. Двуплечий рычаг на одном конце имеет противовес 7, другой его конец соединен с якорем электромагнита 2, который также находится на основном рычаге 6. Цепи. Пластинчатые цепи, применяемые на грузоподъемных машинах, должны соответствовать ГОСТ 191. Сварные и штампованные цепи, применяемые в качестве грузовых и для изготовления стропов, должны соответствовать ГОСТ 228 и другой нормативной документации. Якорные цепи могут применяться без распорок и с распорками. Цепи, применяемые на грузоподъемных машинах и для изготовления стропов, должны иметь сертификат изготовителя об их испытании в соответствии с государственным стандартом, по которому они изготовлены. При отсутствии указанного сертификата должны быть произведены испытания образца цепи для определения разрушающей нагрузки и проверка соответствия размеров государственному стандарту. Коэффициент запаса прочности пластинчатых цепей, применяемых в механизмах кранов, по отношению к разрушающей нагрузке должен быть не менее 3 для групп классификации (режима) М1 и М2 и не менее 5 для остальных групп классификации механизмов. Коэффициенты запаса прочности сварных грузовых цепей и цепей стропов по отношению к разрушающей нагрузке должны приниматься по табл. 4. Таблица 4 Минимальные коэффициенты запаса прочности сварных цепей
Сращивание цепей допускается электросваркой новых вставленных звеньев или с помощью специальных соединительных звеньев. После сращивания цепь должна быть испытана нагрузкой, в 1, 25 раза превышающей ее расчетное тяговое усилие, в течение 10 мин. Тормоза. Механизмы подъема груза и изменения вылета грузоподъемных машин с машинным приводом, за исключением случаев, предусмотренных в ( у механизмов подъема груза, изменения вылета и телескопирования стрелы с гидроцилиндром), должны быть снабжены тормозами нормально закрытого типа, автоматически размыкающимися при включении привода. Механизм подъема с ручным приводом должен быть снабжен автоматически действующим грузоупорным тормозом. У механизмов подъема груза, изменения вылета и телескопирования стрелы с гидроцилиндром должно быть, предусмотрено устройство (обратный клапан), исключающее возможность опускания груза или стрелы при падении давления в гидросистеме. У механизмов подъема груза и изменения вылета с управляемыми муфтами включения механизмов должны применяться управляемые тормоза нормально закрытого типа, сблокированные с муфтой включения с целью предотвращения произвольного опускания груза или стрелы. У грейферных двухбарабанных лебедок с раздельным электрическим приводом тормоз должен быть установлен на каждом приводе. На приводе поддерживающего барабана допускается устройство педали (кнопки) для растормаживания механизма при неработающем двигателе; при этом растормаживание должно быть возможным только при непрерывном нажатии на педаль (кнопку). При срабатывании электрической защиты или выключении тока в сети тормоз должен автоматически замыкаться даже в том случае, когда педаль (кнопка) нажата. Механизмы подъема груза и изменения вылета должны быть снабжены тормозами, имеющими неразмыкаемую кинематическую связь с барабанами. В кинематических цепях механизмов подъема цепных и канатных электроталей допускается установка муфт предельного момента. Тормоз механизма подъема груза и стрелы кранов, за исключением случаев, когда на приводе механизма подъема груза и стрелы имеются двух и более тормозов, должен обеспечивать тормозной момент с учетом коэффициента запаса торможения, принимаемого по нормативной документации, но не менее 1, 5. Для снижения динамических нагрузок на механизме подъема стрелы допускается установка двух тормозов с коэффициентом запаса торможения у одного из них не менее 1, 1, у второго - не менее 1, 25. При этом наложение тормозов должно производиться автоматически. Механизмы подъема груза и изменения вылета стрелы грузоподъемных машин, транспортирующих расплавленный металл и шлак, ядовитые или взрывчатые вещества, должны быть оборудованы двумя тормозами, действующими независимо друг от друга. Механизмы подъема специальных металлургических кранов (колодцевых, стрипперных, клещевых и т.п.), предназначенных для транспортировки раскаленного металла, также должны быть снабжены двумя тормозами. При установке двух тормозов они должны быть устроены так, чтобы в целях проверки надежности торможения одного из них можно было легко снять тормозное действие другого. При наличии на приводе механизма подъема груза и стрелы двух и более тормозов коэффициент запаса торможения каждого из них должен быть не менее 1, 25. У механизма подъема с двумя одновременно включаемыми приводами на каждом приводе должно быть установлено не менее одного тормоза с тем же запасом торможения. В случае применения двух тормозов на каждом приводе и при наличии у механизма двух и более приводов коэффициент запаса торможения каждого тормоза должен быть не менее 1, 1. У грузовых лебедок с двумя приводами последние должны иметь между собой жесткую кинематическую связь, исключающую самопроизвольный спуск груза при выходе из строя одного из приводов. У электрических талей в качестве второго тормоза может быть использован грузоупорный тормоз. В этом случае коэффициент запаса торможения электромагнитного тормоза должен быть не менее 1, 25. У механизмов подъема с группой классификации (режима) М1 один из тормозов может быть заменен самотормозящей передачей. Тормоза на механизмах передвижения должны устанавливаться у грузоподъемных машин в тех случаях, если: а) машина предназначена для работы на открытом воздухе; б) машина, предназначенная для работы в помещении, передвигается по пути, уложенному на полу; в) машина (тележка), предназначенная для работы в помещении на надземном рельсовом пути, перемещается со скоростью более 32 м/мин (0, 53 м/с). Тормоза на механизмах поворота устанавливаются на всех кранах, работающих на открытом воздухе, а также на кранах, работающих в помещении (группа классификации М2 и более). Тормоза на механизмах поворота должны устанавливаться у грузоподъемных машин с группой классификации (режима) М2 и более. Тормоза механизмов передвижения и поворота грузоподъемных машин (за исключением механизмов передвижения автомобильных, пневмоколесных кранов, кранов на специальном шасси и железнодорожных, а также механизмов поворота башенных и портальных кранов) должны быть нормально закрытого типа, автоматически размыкающимися при включении привода. На автомобильных и пневмоколесных кранах, а также на кранах, установленных на специальном шасси автомобильного типа, механизм передвижения которых оборудован управляемым тормозом нормально открытого типа, должен устанавливаться стояночный тормоз. Тормоза на механизме передвижения железнодорожных кранов должны соответствовать нормам Министерства транспорта и коммуникаций РК. На механизмах поворота башенных, стреловых с башенно-стреловым оборудованием и портальных кранов допускается установка управляемых тормозов нормально открытого типа. В этом случае тормоз должен иметь устройство для фиксации его в закрытом положении. Такое устройство может быть установлено на рычагах или педалях управления тормозом. Если системой управления крана предусмотрено торможение электродвигателем, то допускается автоматическое замыкание тормозов механизмов передвижения или поворота на нулевой позиции контроллера с задержкой по времени не более 1 сек или электрическое управление замыканием (размыканием) тормозов на нулевой позиции контроллера педалью (кнопкой). У механизмов передвижения и поворота, оборудованных автоматическим тормозом, допускается установка дополнительного привода для плавного торможения. В этом случае при отключении электродвигателя аппаратами управления тормоз может не замыкаться автоматически. Тормоза механизмов передвижения и поворота у машин, работающих на открытом воздухе, должны обеспечивать остановку и удержание машины и ее тележки при действии максимально допустимой скорости ветра, принимаемой по ГОСТ 1451 для рабочего состояния крана, с учетом допустимого уклона. У механизмов грузоподъемных машин червячная передача не может служить заменой тормоза. Экзаменационный билет №35 Популярное:
|
Последнее изменение этой страницы: 2016-07-12; Просмотров: 1379; Нарушение авторского права страницы