|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Анализ устойчивости по ЛАЧХ и ЛФЧХ разомкнутой системы. ⇐ ПредыдущаяСтр 3 из 3
На границе устойчивости:
Устойчивая система:
Рис.10 Анализ показателей качества САР скорости и следящей системы. Анализ показателей качества САР скорости. По условиям работы САР скорости её переходная характеристика должна иметь установившееся значение: hуст=n=1000 (об/мин). Подбирая коэффициент КПУ2, получаем
Рис.11
На Рис.11 представлена переходная характеристика настроенной САР. КПУ2=0, 88, hуст =n=1000 (об/мин), tр=0, 224(с),
Анализ показателей качества следящей системы. Подбирая КПУ1, мы должны получить переходную характеристику с
ПХ Скорректированной СС системы: КПУ1=0, 613, s=0, 0397%, tр=0, 271(с).
Рис.12
Анализ точности. Скоростная ошибка СС. Дополнительно на входе устанавливается интегратор На Рис.13 представлен график скоростной ошибки eуст2=0, 159
Рис.13
Позиционная ошибка САР скорости. На Рис.14 представлен график позиционной ошибки. eуст1=216
Рис.14
Коррекция электромеханической следящей системы. 5.1Переходная характеристика двигателя На Рис.15 представлена схема модуля
Рис.15
Коррекция САР скорости. Так как при изменении Кпу2 было достигнуто Передаточная функция полученного корректирующего устройства, представленная в tf- форме: W (s)=
Передаточная функция полученного корректирующего устройства, представленная в zpk- форме: H(s)= Воспользуемся оператором: > > rltool На рисунке 16 представлена упрощенная схема корневого годографа.
Рис.16 Элементы корневого годографа: F- входной сигнал 220; C- компенсатор, коэффициент передачи равен 1; Н- тахогенератор, коэффициент передачи Ктг = 0, 0041; G- разомкнутая САР скорости; Задаем команды в рабочей области > > [a, b, c, d]=linmod(‘SARV22’) > > h1=ss(a, b, c, d) > > g=tf(h1) > > h=tf(ktg) > > c=tf(1) > > f=tf(220) > > rltool
Wку(s)= ПХ САР скорости с корректирующим устройством представлена на Рси.17
s=4%; tp=0, 153(c); hуст=1000(об/мин); tc=0, 0975(c); tн=0, 1(c).
Рси.17
Рис.18 ИПХ с указанием Wмак=9740, tcп=0, 283(с). После корректировки получили: Wку(s) =
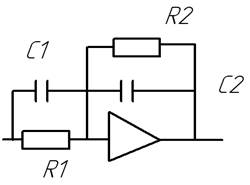
Рассчитаем параметры элементов КУ: Т1= Т2= R1=R2=10(кОм); С1= Т1/ R1= С2= Т2/ R2=
Рис.19-схема реализации КУ.
Анализ чувствительности и точности САР скорости. Анализ чувствительности САР скорости к выбору КУ. Анализ чувствительности проводят методом сравнения 3-х схем:
1. Исходной 2. Измененный параметр + 3. Измененный параметр -
Рис.20
Полученные переходные процессы приведены на Рис.21
Рис.21 Параметры переходных характеристик представлены в таблице 5.
Таблица 5. Коррекция электромеханической следящей системы в пространстве состояний. Структурная схема и матрично-векторное описание с доступом к переменным состояниям.
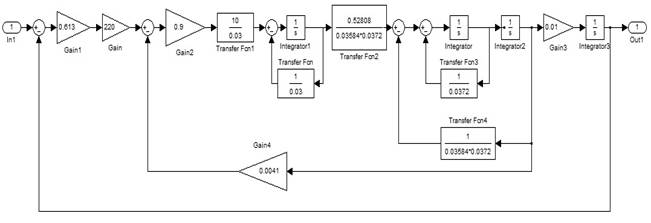
Рис.22 структурная схема электромеханической СС с доступом к переменным состояниям. При задании команд: > > [a, b, c, d]=linmod('v22P7') > > h=ss(a, b, c, d) > > step(h) Выводится переходная характеристика аналогичная пункту 4.2.2. Рис.23 Рис.23 Задаем в рабочей области уравнение системы в матрично-векторном виде: > > a=[0 0.01 0 0; 0 0 1 0; 0 -1/(0.03584*0.0372) -1/0.0372 0.528/(0.03584*0.0372); -0.613*220*0.9*10/0.03 -0.0041*0.9*10/0.03 0 -1/0.03] > > b=[0; 0; 0; 0.613*220*0.9*10/0.03] > > c=[1 0 0 0] > > d=0 > > h=ss(a, b, c, d) > > step(h) Выводится переходная характеристика аналогичная Рис.23. Определим корни исходной системы: > > h2=tf(h) > > pole(h2) ans = -10.8380 +18.7596i -10.8380 -18.7596i -24.7437 -13.7954 Для уменьшения времени регулирования увеличим корни в 3 раза: > > p=[-24.7437*3 -13.7954*3 -10.8380*3+18.7596i*3 -10.8380*3-18.7596i*3] > > K=acker(a, b, p) K = 80.0001 0.0357 0.0006 0.0030 Используя zpk форму проверим переходной процесс полученной модели: > > h3=zpk([], [-74.2311 -41.3862 -32.5140+56.2788i -32.5140-56.2788i], 1000) > > step(h3)
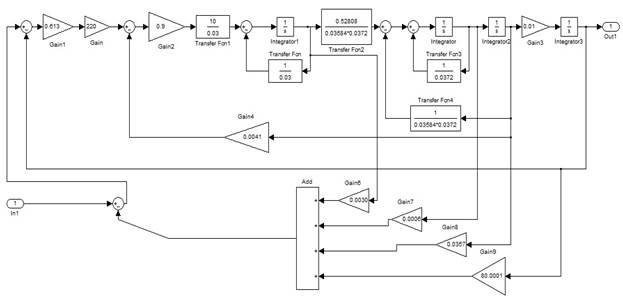
Рси.24 Переходной процесс имеет время в 3 раза меньше чем в исходной системе. Структурная схема и векторно-матричное описание системы с модальным регулятором. Формируем матрицу корней модального регулятора: > > K=acker(a, b, p) На Рис.25 представлена схема с модальным регулятором.
Рис.25 Определим коэффициент формы для определения hуст. На Рис.26 представлена полученная ПХ.
Рис.26 Вводим усилитель, так как установившееся значение не соответствует входному сигналу. Коэффициент усилителя определяется как: 1/0.0123 На Рис.27 представлена схема с усилителем
Рис.27 На Рис.28 представлена полученная ПХ.
Рис.28 Получим переходной процесс всех переменных состояний: > > h4=augstate(h3) На Рис.29 представлены характеристики x1, x2, x3, x4.
Рис.29
Популярное:
|
Последнее изменение этой страницы: 2016-08-24; Просмотров: 1369; Нарушение авторского права страницы


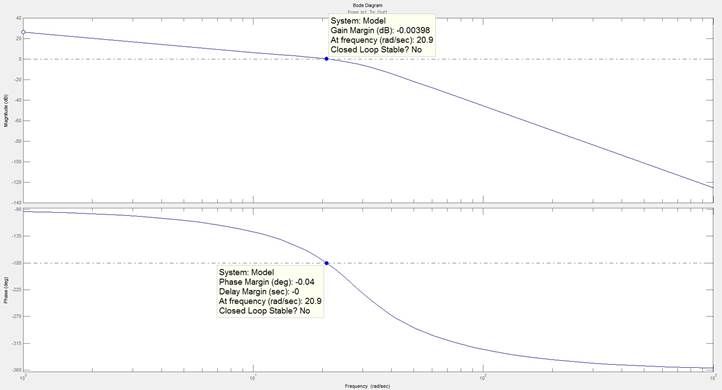 Рис.9
Рис.9



 =11, 6%.
=11, 6%. =(
=(  )%.
)%.



 .
. = n = 1000, по условию работы необходимо получить заданное перерегулирование, это может быть сделано последовательным корректирующим устройством.
= n = 1000, по условию работы необходимо получить заданное перерегулирование, это может быть сделано последовательным корректирующим устройством. .
. .
.



 .
. ;
;  ;
;