|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Дифференциальные уравнения электромеханической системы.Стр 1 из 3Следующая ⇒
Исходные данные 1.1.Электромеханическая система управления руки робота На рис.1 представлена электромеханическая система управления руки робота, в таблице 1- параметры двигателя, в таблице 2- параметры элементов системы, в таблице 3- параметры качества регулирования системы
Таблица 1 Параметры двигателя
Таблица 2 Параметры элементов системы
Таблица 3 Параметры качества регулирования системы
Таблица 4 Параметры передаточной функции двигателя
Дифференциальные уравнения электромеханической системы.
Классическая форма записи уравнений Система уравнений, описывающих работу двигателя, сводится к единому уравнению, где в качестве переменных две величины: UH(t) и 𝝎 вр(t).
Разделим обе части уравнения (2.1) на величину CЕ и введем константы ТМ, ТЯ, КД ТМ ТЯ * Блок регулируемого электропривода ( БРП, см Рис.1 ) состоит из предварительного усилителя (ПУ2) и усилителя мощности (У). Усилитель мощности представляет собой апериодическое звено первого порядка Ку и Ту. Предварительный усилитель- пропорциональное звено с коэффициентом передачи КПУ2 (см. табл.2). Уравнение усилителя мощности: UЯ(t)= КПУ2 * Ку * UП(t)- Ту Предварительный усилитель (ПУ1, см.Рис.1) представляет собой пропорциональное звено с коэффициентом передачи КПУ1. Уравнение предварительного усилителя (ПУ1):
UП(t)= КПУ1 * Uу(t); Редуктор представляет собой интегрирующее звено и служит для преобразования скорости вращения вала двигателя 𝝎 дв(t) в угол поворота jр(t). Уравнение редуктора
jр(t)= Тахогенератор- устройство для измерения скорости вращения. Напряжение на выходе тахогенератора Uвых(t) пропорционально скорости вращения UП(t)= КП* Датчик угла поворота (ДОС).Напряжение на выходе ДОС Uвых(t) пропорционально углу поворота jр(t). UДОС(t)= КДОС * jр(t).
Уравнения состояний. 2.2.1. Дифференциальное уравнение усилителя как dy:
Вводим обозначения:
Преобразуем уравнение:
Структурная схема составлена по уравнению состояний:
На Рис.1представлена структурная схема системы управления.
Уравнение состояний ДПТ. Дифференциальное уравнение записывается: ТМ ТЯ * Вводим обозначения: UЯ(t)=U,
Преобразуем это уравнение и запишем его в численном виде:
Схема составленная по уравнению состояний:
На Рис.2 представлена структурная схема двигателя
Матрицы уравнения состояний следующие
А=
Структурная схема электромеханической следящей системы.
3.1.Блок-схема электромеханической следящей системы Рис.3
Структурная схема САР скорости
Рис.4-структурная схема САР скорости.
Структурная схема следящей системы. Рис.5-структурная схема СС. Исходная переходная характеристика не настроенной САР скорости. Определим передаточную функцию САР скорости.
Рис.6 Передаточная функция - колебательная и имеет следующие параметры: n=2440 Время регулирования- 0.222
Для САР скорости необходимо: n=1000
Переходная характеристика следящей системы расходящаяся ( не устойчива) Определим возможное изменение Кпу1 воспользовавшись ЛЧХ.
Отсюда K= Уменьшение коэффициента в 4.26 раз делает систему на границе устойчивости. После изменения Кпу1 в 4.26 раз система переходит в устойчивый режим Следящая система имеет колебательную переходную характеристику, а по условию она должна быть апериодической.
Анализ электромеханической следящей системы. Анализ устойчивости. 4.1.1 Анализ устойчивости по характеристическому уравнению. Характеристическое уравнение следящей системы определяется:
a4s4+a3s3+a2s2+a1s+a0=0 a4=Тм Тя Ту=0, 0358*0, 03*0, 0372=0.00003 а3= Тм Ту+ Тм Тя=0, 0358*0, 0372+0, 0358*0, 03=0.00240576 а2= Тм +Ту=0, 0358+0, 03=0.0658 а1=1+КПУ1 К Кд КТГ=1+2, 2*10*0, 528*0, 0041=1.0476 а0= КПУ1 К Кд Ку Кр КПУ2=2, 2*220*0, 528*10*0, 01*2, 2=56.22144 Определитель Гурвица по условию устойчивости должен быть > 0
Определитель Гурвица:
а0 а2 a4 0 D= 0 а1 а3 0 > 0 0 а0 а2 a4
a4=0.00003 а3=0.00240576 а2=0.0658 а1=1.0476 а0=56.22144 условие устойчивости для системы следующее: D= а1 а2 а3- а12 a4- а0 а32> 0 D< 0 Так как D< 0, то система неустойчива. Кпу должно быть 0.825
Анализ точности. Скоростная ошибка СС. Дополнительно на входе устанавливается интегратор На Рис.13 представлен график скоростной ошибки eуст2=0, 159
Рис.13
Коррекция САР скорости. Так как при изменении Кпу2 было достигнуто Передаточная функция полученного корректирующего устройства, представленная в tf- форме: W (s)=
Передаточная функция полученного корректирующего устройства, представленная в zpk- форме: H(s)= Воспользуемся оператором: > > rltool На рисунке 16 представлена упрощенная схема корневого годографа.
Рис.16 Элементы корневого годографа: F- входной сигнал 220; C- компенсатор, коэффициент передачи равен 1; Н- тахогенератор, коэффициент передачи Ктг = 0, 0041; G- разомкнутая САР скорости; Задаем команды в рабочей области > > [a, b, c, d]=linmod(‘SARV22’) > > h1=ss(a, b, c, d) > > g=tf(h1) > > h=tf(ktg) > > c=tf(1) > > f=tf(220) > > rltool
Wку(s)= ПХ САР скорости с корректирующим устройством представлена на Рси.17
s=4%; tp=0, 153(c); hуст=1000(об/мин); tc=0, 0975(c); tн=0, 1(c).
Рси.17
Рис.18 ИПХ с указанием Wмак=9740, tcп=0, 283(с). После корректировки получили: Wку(s) =
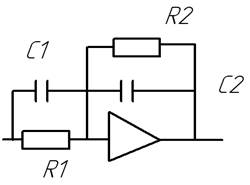
Рассчитаем параметры элементов КУ: Т1= Т2= R1=R2=10(кОм); С1= Т1/ R1= С2= Т2/ R2=
Рис.19-схема реализации КУ.
Библиографический список. 1.Методические указания к выполнению лабораторных работ 1-5 по дисциплине «Теория автоматического управления» для студентов специальности 210300 «Роботы и робототехничесие системы» дневной и вечерней формы обучения /Сост.А.П. Харченко, Ю.С. Слепокуров.: ВГТУ, 2004.23 с. 2.Методические указания к выполнению лабораторных работ 6-10 по дисциплине «Теория автоматического управления» для студентов специальности 210300 «Роботы и робототехничесие системы» дневной и вечерней формы обучения /Сост.А.П. Харченко, Ю.С. Слепокуров.: ВГТУ, 2004.47 с. 3.Методические указания к выполнению лабораторных работ 11-12 по дисциплине «Теория автоматического управления» для студентов специальности 210300 «Роботы и робототехничесие системы» дневной и вечерней формы обучения /Сост.А.П. Харченко, Ю.С. Слепокуров.: ВГТУ, 2006.17 с. 4.Методические указания к выполнению курсовой работы по дисциплине «Теория автоматического управления» для студентов специальности 210300 «Роботы и робототехничесие системы» дневной и вечерней формы обучения /Сост.А.П. Харченко, Ю.С. Слепокуров.: ВГТУ, 2008.29 с.
Исходные данные 1.1.Электромеханическая система управления руки робота На рис.1 представлена электромеханическая система управления руки робота, в таблице 1- параметры двигателя, в таблице 2- параметры элементов системы, в таблице 3- параметры качества регулирования системы
Таблица 1 Параметры двигателя
Таблица 2 Параметры элементов системы
Таблица 3 Параметры качества регулирования системы
Таблица 4 Параметры передаточной функции двигателя
Дифференциальные уравнения электромеханической системы.
Популярное:
|
Последнее изменение этой страницы: 2016-08-24; Просмотров: 1036; Нарушение авторского права страницы



 *
*  +
+  *
*  + CЕ 𝝎 вр (t)= UЯ(t); (2.1)
+ CЕ 𝝎 вр (t)= UЯ(t); (2.1) + ТМ *
+ ТМ *  = КД UЯ(t); (2.2)
= КД UЯ(t); (2.2) ;
; 
 (t).
(t). ;
; 
 ;
;  ;
;  .
.

 ;
;  .
. ;
;  ,
,  .
. ;
;  ,
,  ,
,  .
.



 0 1 0
0 1 0
 ; В=
; В=  ;
; 



 =12.7
=12.7



 = n = 1000, по условию работы необходимо получить заданное перерегулирование, это может быть сделано последовательным корректирующим устройством.
= n = 1000, по условию работы необходимо получить заданное перерегулирование, это может быть сделано последовательным корректирующим устройством. .
. .
.



 .
. ;
;  ;
;