
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Определение скоростей и ускорений звеньев и их точек
Скорости и ускорения звеньев и их точек определяются при заданной угловой скорости Для нахождения скоростей звеньев необходимо продифференцировать их перемещения по времени t в соответствии с правилами дифференцирования сложных функций. Угловая скорость шатуна: Величина Линейная скорость ползуна Величина Линейная скорость точки С шатуна в проекциях на оси X, Y
Величины Модуль вектора скорости Угловое ускорение шатуна Линейное ускорение ползуна Величина Линейное ускорение точки С шатуна в проекциях на оси X, Y находим дифференцированием по времени
Величины Модуль вектора ускорения точки С 1.3. Определение скоростей и ускорений методом планов Данный метод позволяет вычислить величины скоростей и ускорений без использования аналитических зависимостей. Подробное изложение данного метода приведено в работах [1], [2]. Построение планов скоростей и ускорений выполним для положения механизма, показанного на рис. 2.
Скорость точки А, принадлежащей звеньям 1 и 2, определим как окружную во вращательном движении: В данном уравнении вектор Решение этого векторного уравнения производим графически путем построения плана скоростей (рис.3). Из полюса р проводим отрезок р Направление векторов Угловая скорость шатуна Для нахождения вектора скорости точки С шатуна воспользуемся изображающими свойствами плана скоростей [2]. В соответствии с ними три точки одного звена на схеме механизма и три соответствующие точки на плане скоростей образуют подобные и сходственно расположенные фигуры. В данном случае три точки А, В, С шатуна находятся на одной линии. Следовательно, изображающая точка С на плане скоростей будет расположена между точками Построение плана ускорений выполним для того же положения механизма (рис.2). Ускорение точки А складывается из двух составляющих: центростремительного и вращательного. Для упрощения задачи будем считать угловую скорость кривошипа Вектор Определение ускорения точки В производится на основании разложения движения звена 2 на переносное поступательное с точкой А и относительное вращательное вокруг этой точки. В соответствии с этим ускорение точки В определится из векторного уравнения
Так как относительное движение вращательное: Тогда Следует заметить, что кориолисово ускорение в данном случае равно 0, так как переносное движение поступательное. Центростремительное ускорение Вращательное ускорение
Из полюса
Из точки Точка
Направление векторов Угловое ускорение шатуна
Вектор Силовой расчет механизма Исходные данные для расчета Схема кривошипно-ползунного механизма приведена на рис. 5. Здесь же показаны все приложенные силы и моменты. При силовом расчете должны быть заданы (в метрах): радиус кривошипа Задается средняя угловая скорость кривошипа Считаются известными: масса кривошипа масса ползуна момент инерции шатуна относительно центра массы момент инерции вращающихся масс на валу кривошипа Положение механизма определяется углом Угол Задается угол Отсчет угла
К ползуну приложена внешняя сила P (Н). Её величина задается в каждом положении механизма и является положительной, если ее направление совпадает с осью Х. Силы трения в кинематических парах не учитываются. На кривошипе должен быть приложен уравновешивающий момент Методика силового расчета На рис.5 показаны все силы, приложенные к механизму. Силы тяжести звеньев:
где g=9, 8 м/с2. Исследование ведется по методу кинетостатики [1]. К движущемуся механизму применяются уравнения равновесия статики, но в рассмотрение вводятся инерционные нагрузки. Силы инерции звеньев:
Здесь и далее не учитываются касательные составляющие сил инерции Величины ускорений центров масс звеньев Для определения реакции в кинематических парах воспользуемся уравнениями равновесия статически определимой структурной группы “шатун-ползун” (рис.6).
Векторное уравнение равновесия сил:
Здесь Проектируя уравнения (29) на ось X и используя при этом зависимости (26), (27), получим: Здесь Уравнение равновесия моментов всех сил относительно, например, точки A
Векторное уравнение (31) представляет собой сумму моментов, приложенных к структурной группе всех сил, включая реакцию
Величины Используя зависимости (26), (27), (28), после преобразований получаем:
Проектируя уравнение (29) на ось Y системы координат и используя при этом зависимости (26), (27), получим: Определим реакцию Проектируя данное векторное уравнение на оси X, Y, получим:
Для определения реакции
Векторное уравнение равновесия сил на кривошипе:
Так как точки А, Е, D кривошипа находятся на одной линии, проекции центростремительных ускорений определяются по формулам:
Следует отметить, что при определении Уравнение равновесия моментов всех сил относительно точки О, выраженное через проекции векторов на оси X, Y, после преобразований имеет вид:
Популярное:
|
Последнее изменение этой страницы: 2016-08-24; Просмотров: 1736; Нарушение авторского права страницы
 и угловом ускорении
и угловом ускорении  ведущего звена (кривошипа).
ведущего звена (кривошипа). . (16)
. (16) определяется по зависимости (7).
определяется по зависимости (7). . (17)
. (17) находится по зависимости (9) или (14).
находится по зависимости (9) или (14). ;
;  . (18)
. (18) определяются по зависимостям (11).
определяются по зависимостям (11). . (19)
. (19) найдем дифференцированием по времени t выражения (16):
найдем дифференцированием по времени t выражения (16):  . (20) Величина
. (20) Величина  определяется по зависимости (8).
определяется по зависимости (8). найдем дифференцированием по времени t зависимости (17)
найдем дифференцированием по времени t зависимости (17)  . (21)
. (21) определяется по зависимости (10) или (15).
определяется по зависимости (10) или (15). зависимостей (18):
зависимостей (18):  ;
;  . (22)
. (22) находятся по зависимости (12).
находятся по зависимости (12). . (23)
. (23)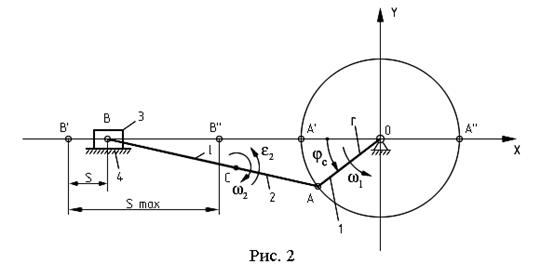
 . Вектор
. Вектор  направлен перпендикулярно ОА в сторону
направлен перпендикулярно ОА в сторону  . Для определения скорости точки В, принадлежащей звеньям 2 и 3, разложим движение звена 2 на переносное поступательное вместе с точкой А и относительное вращательное вокруг точки А. Тогда имеем
. Для определения скорости точки В, принадлежащей звеньям 2 и 3, разложим движение звена 2 на переносное поступательное вместе с точкой А и относительное вращательное вокруг точки А. Тогда имеем  . (24)
. (24) совпадает с линией движения ползуна, линия действия относительной скорости
совпадает с линией движения ползуна, линия действия относительной скорости  перпендикулярна линии АВ шатуна.
перпендикулярна линии АВ шатуна. произвольной длины, изображающий вектор
произвольной длины, изображающий вектор  . Рекомендуется при построении принимать
. Рекомендуется при построении принимать  . Далее из полюса
. Далее из полюса  проводим линию действия скорости
проводим линию действия скорости  - линию действия
- линию действия  пересечения двух линий определяет величины векторов.
пересечения двух линий определяет величины векторов.  ;
;  .
. и
и  определяется по уравнению (24).
определяется по уравнению (24). . Её направление определяется по направлению скорости
. Её направление определяется по направлению скорости  и
и  . Её положение определится из соотношения:
. Её положение определится из соотношения:  . Вектор
. Вектор  проводим из полюса
проводим из полюса  .
. .
. постоянной. Тогда угловое ускорение кривошипа
постоянной. Тогда угловое ускорение кривошипа  , и
, и  . Следовательно,
. Следовательно,  .
. направлен параллельно ОА к центру вращения.
направлен параллельно ОА к центру вращения. .
. .
. . (25)
. (25) направлено параллельно шатуну от точки В к точке А.
направлено параллельно шатуну от точки В к точке А.  .
. перпендикулярно
перпендикулярно  совпадает с линией движения ползуна. Решение уравнения (25) проводим графически путем построения плана ускорений (рис. 4).
совпадает с линией движения ползуна. Решение уравнения (25) проводим графически путем построения плана ускорений (рис. 4).
 проводим отрезок
проводим отрезок  произвольной длины, изображающий вектор
произвольной длины, изображающий вектор  . Рекомендуется при построении принимать
. Рекомендуется при построении принимать  100мм. Далее, из точки
100мм. Далее, из точки  в виде отрезка
в виде отрезка  параллельно АВ в направлении от точки В к точке А.
параллельно АВ в направлении от точки В к точке А. .
. проводим линию действия
проводим линию действия  ,
,  .
. и
и  определяются по уравнению (25).
определяются по уравнению (25). . Его направление определяется по направлению ускорения
. Его направление определяется по направлению ускорения  проводим из полюса
проводим из полюса  .
. , длина шатуна
, длина шатуна  . Положение центров масс звеньев определяется расстояниями
. Положение центров масс звеньев определяется расстояниями  ,
,  ,
,  .
. (кг), масса шатуна
(кг), масса шатуна  (кг),
(кг),  (кг), масса противовеса
(кг), масса противовеса  (кг),
(кг),  (кгм2).
(кгм2). (кгм2).
(кгм2). между положительным направлением оси Х и вектором силы тяжести (отсчитывается от оси Х против часовой стрелки).
между положительным направлением оси Х и вектором силы тяжести (отсчитывается от оси Х против часовой стрелки). отсчитывается от положения кривошипа
отсчитывается от положения кривошипа  , в котором ползун занимает крайнее дальнее положение
, в котором ползун занимает крайнее дальнее положение  .
. для построения плана сил. Во всех положениях механизма задается величина углового ускорения кривошипа
для построения плана сил. Во всех положениях механизма задается величина углового ускорения кривошипа 
 (Нм), величина и направление которого определяются в каждом положении.
(Нм), величина и направление которого определяются в каждом положении. (26)
(26) ;
;  . (27)
. (27) и
и  , возникающие при движении кривошипа с ускорением. Инерционные моменты кривошипа и шатуна:
, возникающие при движении кривошипа с ускорением. Инерционные моменты кривошипа и шатуна:  . (28)
. (28) величины угловых ускорений кривошипа
величины угловых ускорений кривошипа  , шатуна
, шатуна  определяются при кинематическом и динамическом анализе хода машины.
определяются при кинематическом и динамическом анализе хода машины.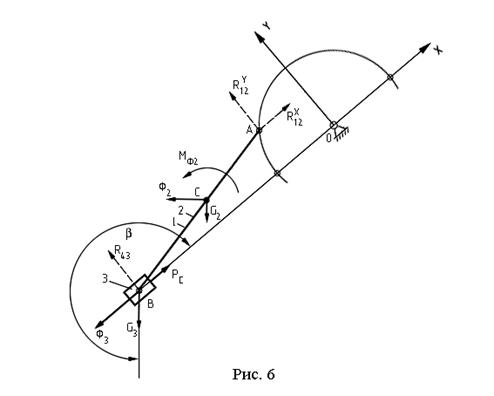
 . (29)
. (29) и
и  — реакции со стороны “отброшенных” звеньев 1 и 4 соответственно на звенья 2 и 3. При этом считаем, что положительное направление
— реакции со стороны “отброшенных” звеньев 1 и 4 соответственно на звенья 2 и 3. При этом считаем, что положительное направление  . (30)
. (30) определяются по зависимостям (22) и (21).
определяются по зависимостям (22) и (21). . (31)
. (31) , взятую относительно точки А. Выраженное через проекции векторов на оси координат X, Y, оно имеет вид:
, взятую относительно точки А. Выраженное через проекции векторов на оси координат X, Y, оно имеет вид: 
 определяются по зависимостям (6). Координаты
определяются по зависимостям (6). Координаты  и
и  можно вычислить по тем же зависимостям (6), подставляя вместо
можно вычислить по тем же зависимостям (6), подставляя вместо  соответственно
соответственно  и
и  .
. (32)
(32) . (33)
. (33) в шарнире
в шарнире  . Условие равновесия шатуна запишется в виде:
. Условие равновесия шатуна запишется в виде: 


 , (34)
, (34)  .
. в шарнире О и величины уравновешивающего момента
в шарнире О и величины уравновешивающего момента 
 (35)
(35) Проектируя уравнение (35) на оси X, Y системы координат с использованием зависимостей (26), (27) и учитывая, что
Проектируя уравнение (35) на оси X, Y системы координат с использованием зависимостей (26), (27) и учитывая, что  , получаем:
, получаем:  , (36)
, (36) .
. ;
;  , (37) где,
, (37) где,  ;
;  . (38)
. (38) не учтены постоянные составляющие от силы тяжести маховика на валу кривошипа и от сил привода двигателя.
не учтены постоянные составляющие от силы тяжести маховика на валу кривошипа и от сил привода двигателя. . (39)
. (39)