
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Кафедра теории механизмов и деталей машинСтр 1 из 4Следующая ⇒
Кафедра теории механизмов и деталей машин Кинематический и силовой расчет механизма Методические указания К выполнению курсовых и расчётно-графических работ По курсу ТММ для студентов всех специальностей Санкт-Петербург 2011 Кинематический и силовой расчет механизма: Метод. указания к выполнению курсовой работы по курсу ТММ для студентов всех специальностей. Изложены указания по кинематическому и силовому расчету кривошипно-ползунного механизма графическим и аналитическим методами. Приведен порядок выполнения расчетов и построений. Возможно использование данных указаний при выполнении расчётно-графических работ по соответствующим разделам курса. Составитель - доц. В.А. Трубняков Рецензент - доц. В.Б.Титов
Методические указания утверждены на заседании кафедры
Редактор – Г.Л. Чубарова
П21(03)
Подписано в печать Формат 60x90 1/16 Бумага тип. № 3. Печать офсетная. Усл. печ.л. 1, 5 Уч. – изд.л. 1, 5 Тираж 150 экз. Заказ № Издание Санкт-Петербургского института машиностроения 195197, Санкт-Петербург, Полюстровский пр., 14
ОП ПИМаш Введение Данные указания предназначены для помощи студентам при выполнении первых двух этапов курсовой работы по ТММ. Целью кинематического расчета является определение перемещений, скоростей и ускорений звеньев и их точек при заданных размерах и движении ведущего звена. Результаты кинематического расчета используются при выполнении следующих этапов работы. Целью силового расчета механизма является определение реакций в кинематических парах, усилий, приложенных к звеньям. Результаты могут быть использованы при проектировочных расчетах механизма. В данной работе рассмотрен расчет аналитическим и графическими методами применительно к кривошипно-ползунному механизму, который является основным объектом в курсовых и расчётно-графических работах по ТММ. Расчет кинематических характеристик кривошипно-ползунного механизма. Силовой расчет механизма Исходные данные для расчета Схема кривошипно-ползунного механизма приведена на рис. 5. Здесь же показаны все приложенные силы и моменты. При силовом расчете должны быть заданы (в метрах): радиус кривошипа Задается средняя угловая скорость кривошипа Считаются известными: масса кривошипа масса ползуна момент инерции шатуна относительно центра массы момент инерции вращающихся масс на валу кривошипа Положение механизма определяется углом Угол Задается угол Отсчет угла
К ползуну приложена внешняя сила P (Н). Её величина задается в каждом положении механизма и является положительной, если ее направление совпадает с осью Х. Силы трения в кинематических парах не учитываются. На кривошипе должен быть приложен уравновешивающий момент Методика силового расчета На рис.5 показаны все силы, приложенные к механизму. Силы тяжести звеньев:
где g=9, 8 м/с2. Исследование ведется по методу кинетостатики [1]. К движущемуся механизму применяются уравнения равновесия статики, но в рассмотрение вводятся инерционные нагрузки. Силы инерции звеньев:
Здесь и далее не учитываются касательные составляющие сил инерции Величины ускорений центров масс звеньев Для определения реакции в кинематических парах воспользуемся уравнениями равновесия статически определимой структурной группы “шатун-ползун” (рис.6).
Векторное уравнение равновесия сил:
Здесь Проектируя уравнения (29) на ось X и используя при этом зависимости (26), (27), получим: Здесь Уравнение равновесия моментов всех сил относительно, например, точки A
Векторное уравнение (31) представляет собой сумму моментов, приложенных к структурной группе всех сил, включая реакцию
Величины Используя зависимости (26), (27), (28), после преобразований получаем:
Проектируя уравнение (29) на ось Y системы координат и используя при этом зависимости (26), (27), получим: Определим реакцию Проектируя данное векторное уравнение на оси X, Y, получим:
Для определения реакции
Векторное уравнение равновесия сил на кривошипе:
Так как точки А, Е, D кривошипа находятся на одной линии, проекции центростремительных ускорений определяются по формулам:
Следует отметить, что при определении Уравнение равновесия моментов всех сил относительно точки О, выраженное через проекции векторов на оси X, Y, после преобразований имеет вид:
Исходные данные для проектирования Для выполнения курсовой работы студентам выдается индивидуальное задание, которое содержит следующие данные:
Обычно расчеты делаются для Содержание и порядок кинематического расчета (I этап) а) определение размеров механизма: радиус кривошипа По полученным размерам вычерчивается в масштабе схема механизма в положении б) расчет перемещений, аналогов скоростей и ускорений ползуна. Производится по зависимостям (4), (5), (9), (10) или по приближенным зависимостям (13), (14), (15). в) построение кинематических диаграмм. Строятся для наглядного представления о характере изменения кинематических параметров (рис. 10).
При построении необходимо учитывать взаимосвязь между ними, выражающуюся в согласованном расположении характерных точек. Нулевому значению аналога скорости соответствует максимальное (или минимальное) значение перемещения ползуна. Нулевым значениям аналога ускорения соответствуют точки максимума или минимума на графике аналога скорости и точки перегиба на графике перемещения. Точкам максимума или минимума на графике аналога ускорения соответствуют точки перегиба на графике аналога скорости. г) построение плана скоростей и ускорений. Производится в положении механизма при Значения Содержание и порядок силового расчета (II этап) а) на схеме механизма (рис. 8 или 9) следует показать (без масштаба), приложенные к звеньям силы б) для всех положений механизма определить величины в) по результатам расчетов построить годограф реакции г) в положении механизма
4.4. Содержание и оформление графической части Все построения выполняются на листах формата А1 или А2 в соответствии с требованиями ECKD [3]. Первый лист отображает результаты кинематического расчета (разд. 4.2) и включает в себя следующее: а) схема машины (выдается вместе с заданием); б) схема механизма в положении в) графики перемещения, аналога скорости и аналога ускорения ползуна (рис 10); г) план скоростей и ускорений (рис.3, рис.4). На втором листе показаны результаты силового расчета (разд. 4.3).Они включают в себя следующее: а) схема нагружения механизма (рис. 8 или 9); б) графики динамической нагрузки в) проверочный план сил для ползуна (рис.14).
При выполнении работы допускается применение компьютерной графики. Разрешается выполнение всех рисунков, схем и графиков на отдельных листах формата А4. 4.5. Содержание и оформление пояснительной записки (для курсовой работы) Выполняется на листах формата А4. Текст должен содержать: а) введение; б) исходные данные; в) расчеты по кинематическому анализу механизма; г) расчеты по силовому анализу; д) список использованной литературы. При проведении расчетов должны быть представлены формулы с необходимыми пояснениями, пример расчета для положения Результаты расчетов по каждому этапу для всех положений механизма необходимо представить в таблицах Таблица 1
Таблица 2
5. Контрольные вопросы 1. Звено-это… а) любая деталь механизма. б) одна или несколько деталей, движущихся как одно целое. 2. Кинематическая пара-это… а) два звена, совершающих одинаковые движения. б) подвижное соединение двух звеньев. в) два звена, движущихся с одинаковыми скоростями. 3. Кинематическая пара, имеющая одну связь- это…пара. а) двухподвижная б) одноподвижная в) пятиподвижная 4. Число степеней свободы механизма равно… а) числу независимых координат, определяющих положение всех звеньев механизма в пространстве. б) числу подвижных звеньев. в) числу видов движения звеньев. 5. Кривошип- это звено, совершающее …движение. а) вращательное б) сложно-плоское в) поступательное 6. Шатун- это звено, совершающее …движение. а) вращательное б) сложно-плоское в) качательное 7. Звено АВ совершает сложно-плоское движение. Известна относительная скорость VВА. Скорости точек В и А связаны векторным уравнением…
8. Центростремительное ускорение точки А, вращающейся вокруг точки O, направлено… а) к точке О. б) от точки О. в) перпендикулярно ОА. 9. Экстремальным значениям скорости ползуна соответствуют……значения его ускорения. а) экстремальные б) нулевые 10. Сила инерции ползуна при поступательном движении направлена… а) по скорости. б) по ускорению. в) против ускорения. 11. Мощность, затрачиваемая на преодоление силы Р на ползуне, который движется со скоростью V и ускорением а, определяется по формуле… а) N= P× V б) N= P× V× Cоs(P, ^V) в) N= P× а
Рекомендуемая литература 1. Фролов К.В. и др. Теория механизмов и механика машин–М.: Высш. шк., 2005. 2. Кинематический расчет рычажных механизмов методом планов скоростей и ускорений: Метод. указания к выполнению расчетно-графической работы по курсу ТММ. Изд. Кафедры ТМ и ДМ. – СПб.: ПИМаш, 2004. 3. Методические указания к оформлению курсовых проектов. Изд. Кафедры ТМ и ДМ. – СПб.: ПИМаш, 1999. Кафедра теории механизмов и деталей машин Популярное:
|
Последнее изменение этой страницы: 2016-08-24; Просмотров: 758; Нарушение авторского права страницы

 , длина шатуна
, длина шатуна  . Положение центров масс звеньев определяется расстояниями
. Положение центров масс звеньев определяется расстояниями  ,
,  ,
,  .
. .
. (кг), масса шатуна
(кг), масса шатуна  (кг),
(кг),  (кг), масса противовеса
(кг), масса противовеса  (кг),
(кг),  (кгм2).
(кгм2). (кгм2).
(кгм2). между положительным направлением оси Х и вектором силы тяжести (отсчитывается от оси Х против часовой стрелки).
между положительным направлением оси Х и вектором силы тяжести (отсчитывается от оси Х против часовой стрелки). отсчитывается от положения кривошипа
отсчитывается от положения кривошипа  , в котором ползун занимает крайнее дальнее положение
, в котором ползун занимает крайнее дальнее положение  .
. для построения плана сил. Во всех положениях механизма задается величина углового ускорения кривошипа
для построения плана сил. Во всех положениях механизма задается величина углового ускорения кривошипа  (с-2). Его величина определяется в результате динамического анализа машины [1] или может быть (по указанию преподавателя) принята равной 0 во всех положениях.
(с-2). Его величина определяется в результате динамического анализа машины [1] или может быть (по указанию преподавателя) принята равной 0 во всех положениях.
 (Нм), величина и направление которого определяются в каждом положении.
(Нм), величина и направление которого определяются в каждом положении. (26)
(26) ;
;  . (27)
. (27) и
и  , возникающие при движении кривошипа с ускорением. Инерционные моменты кривошипа и шатуна:
, возникающие при движении кривошипа с ускорением. Инерционные моменты кривошипа и шатуна:  . (28)
. (28) величины угловых ускорений кривошипа
величины угловых ускорений кривошипа  , шатуна
, шатуна  определяются при кинематическом и динамическом анализе хода машины.
определяются при кинематическом и динамическом анализе хода машины.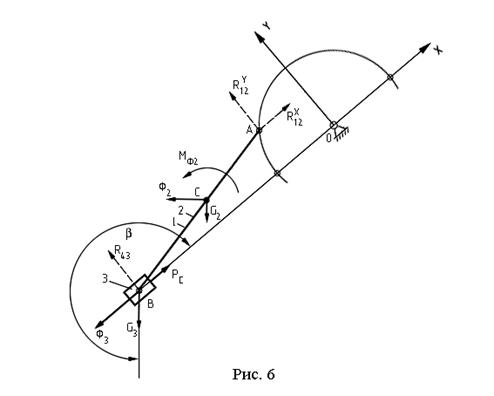
 . (29)
. (29) и
и  — реакции со стороны “отброшенных” звеньев 1 и 4 соответственно на звенья 2 и 3. При этом считаем, что положительное направление
— реакции со стороны “отброшенных” звеньев 1 и 4 соответственно на звенья 2 и 3. При этом считаем, что положительное направление  . (30)
. (30) определяются по зависимостям (22) и (21).
определяются по зависимостям (22) и (21). . (31)
. (31) , взятую относительно точки А. Выраженное через проекции векторов на оси координат X, Y, оно имеет вид:
, взятую относительно точки А. Выраженное через проекции векторов на оси координат X, Y, оно имеет вид: 
 определяются по зависимостям (6). Координаты
определяются по зависимостям (6). Координаты  и
и  можно вычислить по тем же зависимостям (6), подставляя вместо
можно вычислить по тем же зависимостям (6), подставляя вместо  соответственно
соответственно  и
и  .
. (32)
(32) . (33)
. (33) в шарнире
в шарнире  . Условие равновесия шатуна запишется в виде:
. Условие равновесия шатуна запишется в виде: 


 , (34)
, (34)  .
. в шарнире О и величины уравновешивающего момента
в шарнире О и величины уравновешивающего момента 
 (35)
(35) Проектируя уравнение (35) на оси X, Y системы координат с использованием зависимостей (26), (27) и учитывая, что
Проектируя уравнение (35) на оси X, Y системы координат с использованием зависимостей (26), (27) и учитывая, что  , получаем:
, получаем:  , (36)
, (36) .
. ;
;  , (37) где,
, (37) где,  ;
;  . (38)
. (38) не учтены постоянные составляющие от силы тяжести маховика на валу кривошипа и от сил привода двигателя.
не учтены постоянные составляющие от силы тяжести маховика на валу кривошипа и от сил привода двигателя. . (39)
. (39) – наибольший ход ползуна, м;
– наибольший ход ползуна, м;  – отношение длины кривошипа к длине шатуна;
– отношение длины кривошипа к длине шатуна;  1– частота вращения кривошипа, об/мин;
1– частота вращения кривошипа, об/мин;  – усилие сопротивления на ползуне в виде графика;
– усилие сопротивления на ползуне в виде графика;  – угол поворота кривошипа, определяющий положение механизма, в котором производится построение планов;
– угол поворота кривошипа, определяющий положение механизма, в котором производится построение планов;  положений механизма
положений механизма  . Точность вычислений - четыре значащие цифры. Единицы измерения соответствуют системе СИ.
. Точность вычислений - четыре значащие цифры. Единицы измерения соответствуют системе СИ. ; длина шатуна
; длина шатуна  . (49)
. (49) (рис.2).
(рис.2).
 1=
1=  n1/30. (50)
n1/30. (50) , полученные из планов, следует сравнить с аналитическими, определяемыми по зависимостям (17) и (21) при
, полученные из планов, следует сравнить с аналитическими, определяемыми по зависимостям (17) и (21) при  .
. и момент
и момент  на кривошипе. Их направления можно определить, используя план скоростей и план ускорений: сила сопротивления
на кривошипе. Их направления можно определить, используя план скоростей и план ускорений: сила сопротивления  , сила инерции
, сила инерции  – против
– против  . Величины
. Величины  и
и  ,
,  . При этом для вертикальной схемы (рис. 8) используем зависимости (42), (41), (40), (44), (46). Для горизонтальной схемы (рис. 9) используем зависимости (48), (41), (47), (44), (46);
. При этом для вертикальной схемы (рис. 8) используем зависимости (42), (41), (40), (44), (46). Для горизонтальной схемы (рис. 9) используем зависимости (48), (41), (47), (44), (46);  . (51)
. (51)


 , то линия ползуна должна быть вертикальной, а ось X направлена вверх;
, то линия ползуна должна быть вертикальной, а ось X направлена вверх; 








 а) VВ=VА+VВА б) VВ=VА- VВА в) VВ=VА× VВА
а) VВ=VА+VВА б) VВ=VА- VВА в) VВ=VА× VВА