|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Движение тела с одной закреплённой точкой. Регулярная прецессия свободного симметричного волчка.
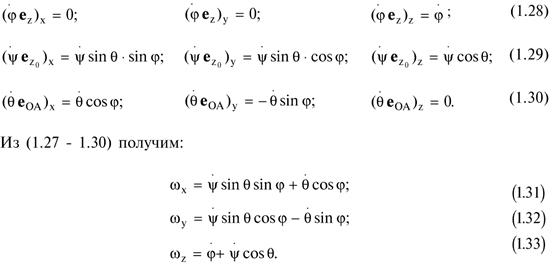
Движение твердого тела с одной неподвижной точкой. В этом случае тело имеет три степени свободы – начала систем XYZ и x 0 y 0 z 0, введенных в начале лекции, можно совместить с точкой закрепления, а для описания движения тела использовать три угла Эйлера: j=j(t), y=y(t), q=q(t). Для твердого тела с одной неподвижной точкой справедлива теорема Эйлера: твердое тело, закрепленное в одной точке, может быть переведено из одного положения в любое другое одним поворотом на некотjрый угол вокруг неподвижной оси, проходящей через точку закрепления. Cледствие из этой теоремы: движение закрепленного в точке твердого тела в каждый момент времени можно рассматривать как вращение вокруг мгновенной оси, проходящей через точку закрепления. Положение этой оси как в пространстве, так и относительно самого тела с течением времени общем случае меняется. Г М положений мгновенной оси вращения относительно неподвижной системы XYZ (или x 0 y 0 z 0 ) – это сложная коническая поверхность с вершиной в точке закрепления. В теоретической механике ее называют неподвижным аксоидом. Г М положений мгновенной оси вращения относительно подвижной системы xyz, жестко связанной с твердым телом, – это тоже коническая поверхность – подвижный аксоид. Линейная скорость произвольной точки твердого тела вокруг мгновенной оси: v=w´ r, где r – радиус-вектор точки относительно начала системы XYZ (или x 0 y 0 z 0 ), совмещенного с точкой закрепления.
Эти уравнения наз. уравнениями Эйлера. В ряде случаев движение с одной закр. точкой можно представить как суперпозицию 2-х вращений вокруг пересекающихся осей, угловые скорости складываются векторно.
dL=L sinqWdt, dL=W´ L dt Þ M= dL=W´ L. Это соотношение позволяет определить направление прецессии при заданном направлении вращения волчка вокруг своей оси. Обратим внимание, что M определяет угловую скорость прецессии, а не угловое ускорение, поэтому мгновенное «выключение» M приводит к мгновенному же исчезновению прецессии, то есть прецессионное движение является безынерционным. mglsinq=WJzw sinq Þ W=mgl/Jzw Билет 18. Вопрос 1. Момент импульса твёрдого тела относительно оси. Момент инерции относительно оси. Теорема Штейнера. Примеры вычисления осевых моментов инерции.
Уравнение моментов. Момент инерции относительно закрепленной оси. Рассмотрим твердое тело как систему жестко связанных между собой материальных точек. Уравнение движения для i-й материальной точки массы m, в лабораторной системе координат имеет вид:
где F. — сумма всех внешних сил, действующих на i-ю материальную точку, f — сила, действующая на i-ю материальную точку со стороны j-й материальной точки, т.е. внутренняя сила. Будем полагать, что силы взаимодействия являются центральными, то есть векторы Умножим обе части уравнения движения (В.6) векторно на радиус-вектор
С учетом того, что (так kак
Величина ной точки) называется моментом импульса системы относительно некоторой неподвижной точки, выбранной за начало координат; момент внешних сил относительно той же точки; величина
Заметим, что для центральных сил учетом введенных выше обозначений уравнение (В.8) записывается в следующем виде:
Это уравнение называется уравнением моментов. Если твердое тело вращается вокруг закрепленной оси, то векторное уравнение (В.10) сведется к скалярному уравнению. В частности, если ось вращения совпадает с осью координат z, то
М — проекции L и М на ось г. При вращении твердого тела вокруг неподвижной оси z с угловой скоростью w скорость каждой материальной точки т, тела будет равна где l — ее расстояние до оси z. Проекции моментов импульса на ось z для этих точек будут равны Величину называют моментом инерции тела относительно закрепленной оси. Момент инерции является мерой инертности тела при вращательном движении относительно закрепленной оси. получаем основное уравнение вращательного движения тела вокруг закрепленной оси z:
При непрерывном распределении массы по объему для вычисления момента инерции пользуются не суммированием, а интегрированием по всему объему тела и тогда (В. 13) приводится к следующему виду: Если удалось определить момент инерции jo относительно некоторой оси, проходящей через центр масс — точку с радиусом-вектором (m—масса точки тела, r— ее радиус-вектор), то в соответствии с теоремой Гюйгенса—Штейнера момент инерции тела / относительно любой другой оси, параллельной первоначальной и находящейся на расстоянии а от нее, равен
Теорема Гюнгенса-Штейнера. Вычисление моментов инерции относительно оси во многих случаях облегчает теорема Гюйгенса, связывающая моменты инерции относительно двух параллельных осей, одна- из которых проходит через центр масс тела. Ось АоВо пусть будет осью, проходящей через центр масс. Радиус-вектор точки с массой m отсчитываемый от этой оси в плоскости, перпендикулярной оси, обозначим R„ а от оси АВ, параллельной оси АоВо, но не проходящей через центр масс, r. Проведем от оси АоВо к оси АВ в этой плоскости вектор а. Пусть Jо — момент инерции относительно оси, проходящей через центр масс, a J — относительно оси АВ, не проходящей через центр масс. По определению моментов инерции имеем
Видно, что r = - a+R; и, следовательно,
Учтем, что Поэтому (32.12) принимает вид
Моменты инерции параллелепипеда со сторонами а, b и с относительно его главных осей. Выберем оси системы координат (х, у, z) совпадающими с главными центральными осями. Начало системы координат совпадает с центром параллелепипеда. Для определения момента инерции относительно оси Ох представим параллелепипед как совокупность тонких прямоугольных пластинок массой dm = толщиной dy. Момент инерции пластинки относительно оси Ох в соответствии с теоремой Гюйгенса—Штейнера равен Момент инерции всего параллелепипеда получим, интегрируя по всему объему
Вопрос 2. Работа внешней гармонической силы при вынужденных колебаниях. Автоколебания. Параметрические колебания. Примеры. Параметрические и автоколеьания. Пример. Работа внешней силы. Работа за период: Aпер.=(F02bw2T)/((w20-w2)+4w2b2) Из-за потери энергии на трение собственные колебания постепенно затухают. Если к осциллятору подводить энергию от источника внешней гармонической силы, -то он начнет колебаться с частотой этой силы, которая вообще говоря, отличается от собственной частоты осциллятора. Однако можно создать устройства, в которых осциллятор сам регулирует подвод энергии из внешнего источника таким образом, чтобы компенсировать потери энергии на трение. За период колебаний из внешнего источника энергия, приобретаемая осциллятором, равна энергии, затрачиваемой на преодоление сил трения. В результате осциллятор совершает незатухающие колебания. Такие самоподдерживающиеся колебания называются автококлебаниями. Если трение невелико, то за один период в систему поступает лишь небольшая доля полной энергии осциллятора. В этом случае автоколебания с очень большой точностью являются гармоническими и их частота очень близка к частоте собственных колебаний. Если же силы трения велики, то за один период в систему подводится значительная часть полной энергии осциллятора и поэтому колебания сильно отличаются от гармонических, хотя и являются периодическими. Период этих колебаний не совпадает с периодом собственных колебаний осциллятора. Автоколебания маятника. Рассмотрим колебания маятника, подвешенного на оси во вращающейся втулке (Матвеев рис. 156 305 стр), и превращение его энергии в различных случаях. Вращающаяся втулка в результате скольжения относительно оси совершает работу на преодоление сил трения. Источником энергии, превращенной во внутреннюю, является машина, приводящая во вращение втулку. В тот полупериод колебаний маятника, когда направления вращения оси маятника и втулки совпадают, силы трения совпадают по направлению с движением точек поверхности оси. Поэтому эти силы вызывают усиление колебаний маятника. С другой стороны, энергия, превратившаяся во внутреннюю, за врмя полупериода колебаний в сравнении со случаем покоящегося маятника уменьшаетс, я ввиду того, что относительное перемещение трущихся поверхностей (внешняя поверхность оси и внутренняя поверхность втулки) уменьшается. Поэтому лишь часть энергии от машины, вращающей втулку, превращается во внутреннюю, а другая часть идет на увеличение энергии колебаний маятника. В другой полупериод колебаний маятника, когда направления вращения его оси и оси втулки противоположны, силы трения действуют против направления движения маятника. Поэтому они тормозят его движение и энергия колебаний маятника превращается во внутреннюю. Энергия от машины, вращающей втулку, в этом случае также полностью превращается во внутреннюю. Полный результат превращений энергии в течение периода колебаний определяется характером зависимости сил трения от скорости. Если силы трения не зависят от скорости, то энергия, приобретаемая маятником в полупериоде колебаний, когда направления вращения его оси и вала совпадают, равна энергии, теряемой им на работу против сил трения в другом полупериоде. В этом случае вращение втулки не вносит каких-либо изменений в колебания маятника в сравнении со случаем невращающейся втулки. Если сила трения увеличивается с возрастанием скорости, то энергия, приобретаемая маятником за полупериод колебаний, когда направления вращения его оси и вала совпадают, меньше энергии, теряемой им на работу против сил трения в другом полупериоде, поскольку во втором полупериоде относительные скорости больше, а следовательно, и силы трения больше, чем в первом полупериоде. В этом случае вращение втулки увеличивает затухание колебаний маятника. Параметрическое возбуждение колебаний. Свойства колеблющихся систем описываются величинами, называемыми параметрами. Например, математический маятник характеризуется одним параметром — его длиной. При изменении этого параметра изменяются колебательные свойства маятника, а именно частота собственных колебаний. Если этот параметр изменять в определенном такте с колебаниями, то можно сообщить маятнику энергию и тем самым увеличить амплитуду его колебаний либо просто поддерживать колебания в незатухающем режиме. Такое возбуждение и поддержание колебаний называется параметрическим. Хорошо известным примером параметрического возбуждения и поддерживания колебаний является качание на качелях. Когда качели находятся в верхней точке, качающийся на них приседает, а когда качели проходят нижнюю точку, он снова выпрямляется. В результате приседания в верхних точках совершается меньшая по модулю работа, чем работа при подъеме в нижней точке. Разность работ, по закону сохранения, равна разности энергий качаний, и качели раскачиваются. Если эта энергия затрачивается полностью на работу силы трения, то качания поддерживаются в незатухающем режиме.
Билет 19. Вопрос 1. Популярное:
|
Последнее изменение этой страницы: 2016-08-31; Просмотров: 1259; Нарушение авторского права страницы
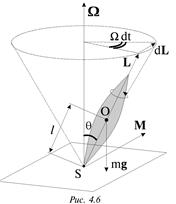 Регулярная прецессия свободного симметричного волчка. Рассмотрим тяжелый симметричный гироскоп, у которого неподвижная точка S (точка опоры о подставку) не совпадает с центром масс О (рис. 4.6). Момент силы тяжести относительно точки S: M=mglsinq. Изменение момента импульса L определяется выражением: dL=Mdt. При этом и L, и ось волчка прецессируют вокруг вертикального направления с угловой скоростью W. Еще раз подчеркнем: делается допущение, что выполнено условие w> > W и что L постоянно направлен вдоль оси симметрии гироскопа.
Регулярная прецессия свободного симметричного волчка. Рассмотрим тяжелый симметричный гироскоп, у которого неподвижная точка S (точка опоры о подставку) не совпадает с центром масс О (рис. 4.6). Момент силы тяжести относительно точки S: M=mglsinq. Изменение момента импульса L определяется выражением: dL=Mdt. При этом и L, и ось волчка прецессируют вокруг вертикального направления с угловой скоростью W. Еще раз подчеркнем: делается допущение, что выполнено условие w> > W и что L постоянно направлен вдоль оси симметрии гироскопа.
 и
и  коллинеарны.
коллинеарны.

 , то
, то  ), после суммирования по всем точкам системы получим
), после суммирования по всем точкам системы получим
 — импульс i-й материаль-
— импульс i-й материаль-
 является моментом всех внутренних сил. Выражение для момента внутренних сил можно преобразовать:
является моментом всех внутренних сил. Выражение для момента внутренних сил можно преобразовать: 
 . Тогда с
. Тогда с (B10)
(B10)

 Так как w одинакова для всех точек твердого тела, то момент импульса всего тела относительно оси z равен
Так как w одинакова для всех точек твердого тела, то момент импульса всего тела относительно оси z равен 
 (B13)
(B13)


 (В. 17) где т — масса тела.
(В. 17) где т — масса тела. (32.11)
(32.11)  Поэтому получаем
Поэтому получаем (32.12)
(32.12) =0 по определению оси, проходящей через центр масс, а
=0 по определению оси, проходящей через центр масс, а  =m—масса тела.
=m—масса тела. dy и
dy и каждой такой
каждой такой
 Аналогично вычисляются моменты инерции относительно осей у и х:
Аналогично вычисляются моменты инерции относительно осей у и х: