Лекция 3. ДИНАМИКА ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ
Поступательное и вращательное движение твердого тела; момент инерции
тела; уравнение динамики вращательного движения; теорема Штепнера;
плоское движение; закон сохранения момента импульса.

| где г4 — радиус-вектор i-й точки (начало ИСО
|
1. Поступательное и вращательное
движение твердого тела
Перейдем теперь к изучению движения
протяженного абсолютно твердого тела, которое
можно рассматривать как совокупность жестко
связанных материальных точек. Такое тело
произвольной формы обладает, как мы знаем,
шестью степенями свободы.

Простейшим видом движения твердого тела
является движение, при котором тело
перемещается параллельно самому себе (на рис.3.1
АВ || А'В'). Такое движение называется
поступательным.
где М — масса тела и v — скорость любой точки
тела. Второй закон Ньютона при поступательном
движении тела записывается в виде:
выбрано на оси вращения OZ) и со — угловая
скорость точки, которая одинакова для всех точек
тела. Скорость v{ направлена по касательной к
окружности, а по абсолютной величине
Vj = corj sinBj = coRj, (3.4)
где Rj — радиус окружности, по которой движется
точка.
Отметим сразу же, что проекция момента
импульса i-й частицы на ось вращения OZ
(момент импульса относительно оси OZ)
называется моментом инерции материальной
точки относительно оси OZ.
где а — ускорение тела (любой его точки) и Fk —
внешняя сила, действующая на тело.
Другим простейшим видом движения твердого
тела является вращение тела вокруг
фиксированной в пространстве оси. При таком
движении все точки тела описывают окружности,
лежащие в плоскостях, перпендикулярных оси
вращения OZ (рис.3.2), причем линейная скорость
i-й точки
2. Момент инерции твердого тела
Для получения уравнения движения для тела,
вращающегося вокруг закрепленной оси, следует
воспользоваться уравнением моментов (2.21) из
предыдущей лекции, взяв лишь проекцию этого
уравнения на ось вращения OZ:

перемещается вдоль выбранной оси OZ, и
наоборот. Если ось OZ на рис.3.4 направлена на
нас, то момент силы Fkl будет отрицательным.
Подставляя (3.7) в (3.6), получим уравнение
движения тела вокруг закрепленной оси:

относительно оси OZ. Справа в выражении (3.6)
стоит сумма проекций на ось OZ моментов
внешних сил (или сумма моментов внешних сил
относительно оси OZ). По определению
3. Уравнение динамики вращательного
движения
проходящую через точку приложения этой силы
перпендикулярно оси вращения (рис.3.3). Тогда
видим, что угловое ускорение определяется
моментами внешних сил, действующих на тело, и
его моментом инерции относительно оси
вращения подобно тому, как ускорение а при
поступательном движении определяется
внешними силами и массой тела.
Следовательно, можно сказать, что при
вращательном движении мерой инерции является
не масса тела, а его момент инерции, который,
как мы увидим позже, зависит не только от
массы, но и от формы и размеров тела, и от того,
как эта масса распределена в нем.
Теорема Штейнера
Рассмотрим теперь некоторые свойства
момента инерции тела относительно оси OZ. Из
определения (3.7) очевидно, что момент инерции
сложного тела равен сумме моментов инерции его
частей относительно одной и той же оси OZ.

Далее, пусть OZq — ось, параллельная оси OZ,
и проходящая через центр масс тела (рис.3.5).
Расстояние между осями OZ и OZq равно d. Оси
OZ и OZq перпендикулярны рисунку. По
определению
где Ri() — расстояние от точки т4 до оси OZq.
Тогда

т.е. момент инерции тела относительно
произвольной оси OZ равен моменту инерции
тела относительно оси OZq, проходящей через
центр масс тела параллельно оси OZ, плюс
произведение массы тела на квадрат расстояния
между осями OZ и OZq. Это утверждение иногда
называют теоремой о параллельных осях или
теоремой Штейнера. Именно поэтому, очень
важно знать (или уметь вычислять) моменты
инерции различных тел относительно осей OZq,
проходящих через центр масс тела.
Расчет момента инерции
производится на практике следующим образом:
если твердое тело сплошное, то его можно
разбить на бесконечно большое количество
бесконечно малых частей массы dm = pdV, где
р — плотность тела в данном месте, a dV — объем
кусочка dm, и суммирование заменить на
интегрирование по объему тела V, т.е.

где Rq — расстояние от кусочка dm до оси OZo.
В качестве примера вычислим момент инерции
тонкого однородного стержня (длиной L и массой
М) относительно перпендикулярной ему оси,
проходящей через его середину (центр масс
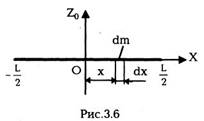
тонкого однородного стержня находится в его
середине). Направим ось ОХ вдоль стержня и
поместим начало координат в середине стержня
Укажем еще для примера, что момент инерции
полого цилиндра массой М и радиусом R
относительно оси цилиндра равен MR2. Если же
цилиндр сплошной, то его момент инерции
Рассмотренные выше простейшие виды
движения твердого тела — поступательное
движение и вращение — особенно важны потому,
что любое произвольное движение твердого тела
сводится к ним. Можно строго доказать, что
произвольное движение твердого тела можно
представить в виде совокупности поступательного
движения всего тела со скоростью какой —либо
его точки О и вращения вокруг оси, проходящей
через эту точку. При этом скорость
поступательного движения v0 зависит от того,
какую именно точку мы выбрали.
сказать, что угловая скорость имеет " абсолютный"
характер, то есть можно говорить об угловой
скорости вращения твердого тела, не указывая
при этом, через какую именно точку проходит ось
вращения. Поступательная же скорость v0 такого
" абсолютного" характера не имеет. Обычно в
качестве точки О выбирают центр масс тела.
Преимущества такого выбора выяснятся ниже.
5. Плоское движение
Рассмотрим наиболее простой вид
произвольного движения твердого тела, так
называемое плоское движение, когда все точки
тела движутся в параллельных плоскостях,
ориентация которых в пространстве остается
неизменной, а тело вращается вокруг оси,
перпендикулярной этим плоскостям.
Будем рассматривать плоское движение в
неподвижной ИСО XYZ, причем плоскость XOY
совместим с плоскостью движения частиц, в
которой находится центр масс тела, скорость
которого v0 = уцм относительно неподвижной
системы будем считать скоростью
поступательного движения тела (скорость v0,
естественно, расположена в плоскости XOY).
Далее будем считать, что все силы fk,
действующие на тело, параллельны плоскости
XOY. Тогда уравнение поступательного движения
тела можно записать в виде:
центра масс тела. Уравнение (3.12) проектируется
на оси ОХ и OY.
Уравнение вращательного движения тела
вокруг оси OZq, проходящей через центр масс
тела перпендикулярно неподвижной плоскости
XOY, совпадает по форме с уравнением
вращательного движения тела вокруг
закрепленной оси (3.9):

Последнее утверждение (его можно строго
доказать! ) выглядит довольно странным, так как
уравнение (3.9) было написано относительно ИСО,
система же отсчета (ось OZo), в которой
происходит вращение тела, не является
инерциальной, так как центр масс тела движется с
ускорением а0. Тем не менее это так, и связан
этот факт именно с тем, что мы выбрали в
качестве точки О при рассмотрении
поступательного движения центр масс тела. При
решении конкретных задач уравнения (3.12) и
(3.13) следует еще дополнить кинематическими


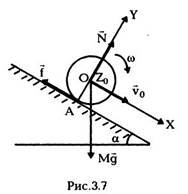
Для этого воспользуемся условием отсутствия
проскальзывания цилиндра. Если нет
проскальзывания, то точка А (см. рис.3.7),
находящаяся на поверхности цилиндра и
соприкасающаяся с наклонной плоскостью, в
любой момент времени неподвижна в системе
XOY. С другой стороны, эта точка движется
В качестве примера рассмотрим движение
сплошного цилиндра радиусом R и массой М,
скатывающегося без проскальзывания с
наклонной плоскости, составляющей угол а с
горизонтом (рис.3.7). На цилиндр действуют три
Популярное: