
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Двигателя постоянного тока с независимым возбуждением»
Двигателя постоянного тока с независимым возбуждением»
Приложение к стенду ИДПТ-НВ
Составители:
Профессор, д.т.н. Исмагилов Ф.Р.
Доцент, к.т.н. Исмагилов Ш.Г.
Уфа - 2011 ОГЛАВЛЕНИЕ
1. ЦЕЛЬ РАБОТЫ
Изучение основных характеристик и режимов работы двигателей постоянного тока (ДПТ) с независимым возбуждением (НВ), практическое ознакомление с двигательным режимом, режимами торможения противовключением (тормозной спуск), генераторного (для ДПТ с НВ) и динамического торможения, с реостатным регулированием скорости вращения ДПТ, методами экспериментального получения электромеханических и механических характеристик ДПТ в указанных режимах. ПРИБОРЫ И ОБОРУДОВАНИЕ
Лабораторный стенд ИДПТ-НВ состоит из приборного блока и электромеханического агрегата.
Технические данные двигателя постоянного тока с независимым возбуждением 2ПН100L-УХЛ1
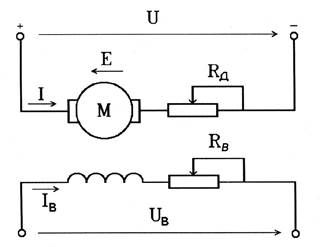
ТЕОРЕТИЧЕСКАЯ ЧАСТЬ Конструкция ДПТ ДПТ состоит из трех основных частей: статора с обмоткой возбуждения, ротора с якорной обмоткой и щеточно-коллекторного узла, необходимого для подведения напряжения к обмотке якоря (далее ОЯ). При этом щетки неподвижны, а коллектор жестко связан с якорем. В ДПТ для улучшения условий коммутации могут быть также предусмотрены и дополнительные полюса, а для компенсации поперечной реакции якоря и компенсационные обмотки на полюсах статора. В зависимости от способа электромагнитного возбуждения ДПТ подразделяют на ДПТ с НВ, ПВ и смешанным возбуждением. Иногда встречается название «ДПТ с параллельным возбуждением», однако такой ДПТ является частным случаем ДПТ с НВ и этот термин применяется как доопределяющий. В данной работе исследуются ДПТ с НВ и ПВ. Уравнение электромеханической характеристики ДПТ с НВ
Схема включения ДПТ с НВ представлена на рис. 3.1
Рис. 3.1. Схема включения ДПТ с НВ. Для ДПТ с НВ справедлива система уравнений, описывающая его статическое состояние:
где При использовании системы СИ имеет место численное равенство коэффициентов пропорциональности, которые можно обозначить Решая совместно первые два уравнения в системе (3.1) можно получить уравнение электромеханической характеристики ДПТ, которое определяет зависимость
Анализ уравнений электромеханической характеристики Скорость холостого хода
При
Ток короткого замыкания
С увеличением нагрузки на валу ДПТ возрастает и ток якоря
Максимальное значение тока короткого замыкания имеет место при Реально режим короткого замыкания имеет место кратковременно, при пуске двигателя и при стопорении двигателя моментом сопротивления. Ограничение величины При прямом пуске двигателя значения тока Это обуславливает необходимость ограничения Величина максимально допустимого тока
обычно принимающим значения от 2 до 5, в зависимости от типа двигателя. Максимально допустимый ток короткого замыкания должен соответствовать неравенству
Для микродвигателей обычно осуществляется прямой пуск без добавочных сопротивлений, но с ростом габаритов ДПТ необходимо производить реостатный пуск, особенно если привод с ДПТ используется в напряженных режимах с частыми пусками и торможениями. Практически следует помнить, что, если не ограничивать пусковые токи, то частыми пусками можно сжечь обмотку якоря ДПТ. С введением Динамическое торможение
Для осуществления данного режима якорь двигателя отключают от сети и замыкают на тормозное сопротивление
Рис.3.8. Схема включения ДПТ с НВ при динамическом торможении.
Уравнение механической характеристики для этого режима запишется как
где Ток якоря можно определить как
т. е. ток (и, следовательно, момент двигателя) изменяет свой знак, чем и обуславливается процесс торможение. На рис. 3.9 представлены механические характеристики ДПТ с НВ, соответствующие режиму динамического торможения.
Рис. 3.9. Механические характеристики ДПТ с НВ, соответствующие режиму динамического торможения при
Способ динамического торможения весьма экономичен, т. к. двигатель работает генератором на постоянную нагрузку, потребляя из сети энергию только на электромагнитное возбуждение. При переводе ДПТ из двигательного режима в режим динамического торможения необходимо ограничивать величину максимального тормозного тока в момент переключения. Тормозной спуск
Данный вид торможения имеет место при превышении активным моментом сопротивления величины пускового момента, что приводит к изменению направления вращения якоря двигателя и соответственно знака ЭДС. Из первого уравнения системы (3.1) следует, что в этом случае ток якоря определяется как
т. е. ток якоря превышает значения токов короткого замыкания (3.4). Поэтому для реализации этого режима необходимо ограничивать ток якоря введением добавочного сопротивления Графически механические и электромеханические характеристики в этом случае являются продолжением соответствующих характеристик в 4 квадрант. Режим тормозного спуска широко применяется в грузоподъемных механизмах для опускания грузов. Противовключение изменением полярности подводимого напряжения Если у ДПТ, работающего в двигательном режиме на ходу изменить полярность напряжения на обмотке якоря на противоположную, то знак тока якоря
Двигатель переходит в тормозной режим, и его механическая характеристика изображается во 2 квадранте. При этом происходит интенсивное торможение и скорость вращения двигателя падает до нуля. Если в этот момент времени обмотку якоря не отключить от сети, то направление вращения изменяйся на противоположное (график механической характеристики размещен в 3 квадранте), т.е. двигатель реверсируется. Это, безусловно, накладывает определенные ограничения на применимость данного способа торможения. С энергетической точки зрения данный способ не экономичен, т.к. большое количество энергии выделяется на добавочном сопротивлении, которое необходимо включать в якорную цепь для ограничения бросков тормозного тока. Механические характеристики для этого режима торможения представлены на рис.3.10.
Рис. 3.10. Механические характеристики ДПТ с НВ, соответствующие режиму торможения противовключением путем изменения полярности подводимого напряжения при Приборный блок
Внешний вид приборного блока (ПБ) представлен на рис 4.1.
Рис. 4.1. Лицевая панель приборного блока На левой боковой стенке ПБ расположены: трехфазный автомат защиты QF4, подводящий трехфазное напряжение 380В, отключающий стенд при перегрузках и устройство защитного отключения стенда (УЗО), срабатывающее при появлении токов утечки на землю, что обеспечивает защиту персонала от поражения током.
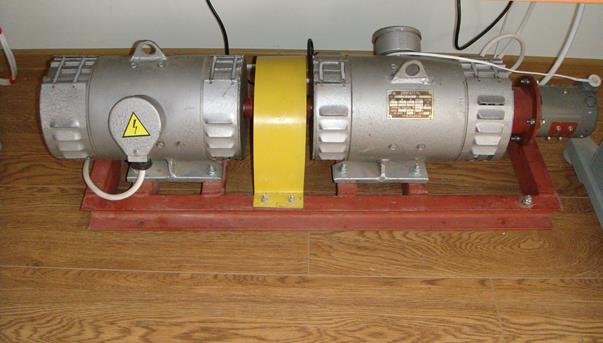
На лицевой панели расположены органы управления стендом, индикаторы, измерительные приборы, гнезда для подключения к приборному блоку внешних устройств и изображение электрической схемы стенда. Электромашинный агрегат. Внешний вид электромашинного агрегата приведен на рис. 4.2.
Рис.4.2 Электромашинный агрегат стенда ИДПТ-НВ
Электромашинный агрегат состоит из объединенных в одном конструктиве двух ДПТ с НВ, валы которых жестко соединены. На валу одного из двигателей установлен тахогенератор постоянного тока.
Указания мер безопасности.
1. 2. При подключенном к напряжению сети стенде в целях пожарной безопасности и предотвращения перегрева не допускается помещать на верхнюю крышку приборного блока посторонние предметы (листы бумаги, книги и т. п.), закрывающие вентиляционные отверстия.
6. УКАЗАНИЯ по ВЫПОЛНЕНИЮ ЛАБОРАТОРНОЙ РАБОТЫ Таблица 6.1
Заполнить таблицу 6.1, рассчитав коэффициент пропорциональности
где Е - ЭДС ДПТ, ω 0 - скорость идеального холостого хода ДПТ. Построить график зависимости
Таблица 6.2 Для значения добавочного сопротивления RД1 = ______ Ом Режим рекуперативного торможения
· Ввести М1 в режим генераторного торможения, для чего необходимо продолжить плавное снижение тока возбуждения Iв2 двигателя М1. Это приведет к увеличения частоты вращения и тока IЯ1. Необходимо быстро снять пять значений тока и частоты вращения и также занести их в таблицу 6.2. для заданных значений RД1. · Процедуру повторить еще для трех значений добавочного сопротивления в цепи якоря двигателя М1 - RД1 =12 Ом; 28 Ом и 40 Ом. Для этого переключатель SA3 необходимо выставлять в положение 4, 7 и 10 соответственно. Причем для устранения возможных автоколебаний электромашинного агрегата переключатель SA4 в этих случаях необходимо выставить в положение 1. · Выключить автомат блока питания БП №3 и отключить автоматы QF2 и QF3. Выставить переключатели SA3 и SA4 в положение 0. Отключить источники ИТ1 и ИТ2 нажатием на них кнопок «Power». Разобрать схему. Рис. 6.4 Схема исследования двигательного режима машины М1 · Собрать схему, представленную на рис.6.4. · Выставить SA3 в положение 0, а SA4 в положение 10. · Включить источники ИТ1 и ИТ2 и выставить на них значения IВ1 =0, 76А и IВ2=0А. · Включить автомат БП №3 и автоматы QF2 и QF3. Двигатель М1 должен начать вращаться. · Поворачивая потенциометр источника ИТ2 необходимо начать увеличивать ток возбуждения нагрузочной машины М2 - от 0 до 0, 76А. При этом необходимо снимать показания амперметра рА1, частоты вращения и тока возбуждения IВ1 и занести их в таблицу 6.3. Внимание! Не допускается превышение токами якоря М1и М2 значений IЯ1 =15А и IЯ2=20 А ( в зависимости от того, что наступит быстрее ). Если увеличение тока возбуждения IВ2 недостаточно для нагрузки М1 до IЯ1 =15А необходимо поэтапно уменьшать величину добавочного сопротивления RД2, переключением SA4 в положения 9, 8, 7, 6 и так далее.
· Процедуру повторить еще для трех значений добавочного сопротивления в цепи якоря двигателя М1 - RД1 =12 Ом; 28 Ом и 40 Ом. Для этого переключатель SA3 необходимо выставлять в положение 4, 7 и 10 соответственно. Таблица 6.3
Для значения добавочного сопротивления RД1 = ______ Ом Двигательный режим
Таблица 6.4 Для значения добавочного сопротивления RД1 = 40 Ом Режим противовключения
Таблица 6.4 Для значения добавочного сопротивления RД1 = _____ Ом Режим динамического торможения
7. УКАЗАНИЯ ПО оформлению отчета
Отчет должен содержать: 1. Наименование работы. 2. Цель работы. 3. Изображение электрической принципиальной схемыстенда. 4. Таблицы с результатами измерений. 5. Графики необходимых зависимостей и характеристик: · Зависимость · построить на одном четырехквадрантном графике экспериментально полученные механические (электромеханических) характеристики ДПТ с НВ в двигательном режиме, а также режимах рекуперативного торможения тормозного спуска и динамического торможения при различных значениях сопротивления цепи якоря исследуемого двигателя;
6. Ответы на контрольные вопросы. 8. контрольные вопросы 1. Что такое естественная и искусственная механические и электромеханические характеристики? 2. Чем отличается естественная механическая характеристика от искусственных? 3. Назовите режимы работы двигателя постоянного тока. 4. Объясните, почему при малых моментах сопротивления скорость ДПТ с НВ с увеличением потока возбуждения падает, а при больших моментах сопротивления – возрастает. 5. Перечислите основные достоинства и недостатки известных Вам способов торможения ДПТ с НВ. 6. Почему при увеличении нагрузки на валу ДПТ с НВ частота его вращения падает? 7. Как ввести ДПТ с НВ в генераторный режим торможения с рекуперацией энергии в сеть? 8. Как ввести ДПТ с НВ в режим тормозного спуска? 9. Почему с введением сопротивлений в якорную цепь ДПТ c НВ жесткость его механических характеристик падает? 10. Какие имеются способы безопасного пуска ДПТ с НВ?
двигателя постоянного тока с независимым возбуждением»
Приложение к стенду ИДПТ-НВ
Составители:
Профессор, д.т.н. Исмагилов Ф.Р.
Доцент, к.т.н. Исмагилов Ш.Г.
Уфа - 2011 ОГЛАВЛЕНИЕ
1. ЦЕЛЬ РАБОТЫ
Изучение основных характеристик и режимов работы двигателей постоянного тока (ДПТ) с независимым возбуждением (НВ), практическое ознакомление с двигательным режимом, режимами торможения противовключением (тормозной спуск), генераторного (для ДПТ с НВ) и динамического торможения, с реостатным регулированием скорости вращения ДПТ, методами экспериментального получения электромеханических и механических характеристик ДПТ в указанных режимах. ПРИБОРЫ И ОБОРУДОВАНИЕ
Лабораторный стенд ИДПТ-НВ состоит из приборного блока и электромеханического агрегата.
Популярное:
|
Последнее изменение этой страницы: 2016-08-31; Просмотров: 3039; Нарушение авторского права страницы
 (3.1)
(3.1)
 - напряжение питания якорной цепи, В;
- напряжение питания якорной цепи, В;  - суммарное сопротивление якорной цени, Ом,
- суммарное сопротивление якорной цени, Ом,  ,
,  - сопротивления обмотки якоря,
- сопротивления обмотки якоря,  - добавочное сопротивление в цепи якоря;
- добавочное сопротивление в цепи якоря;  - электромагнитный момент, Нм;
- электромагнитный момент, Нм;  ток якоря, А;
ток якоря, А;  - угловая скорость вращения двигателя, рад/с;
- угловая скорость вращения двигателя, рад/с;  - ЭДС вращения якоря, В;
- ЭДС вращения якоря, В;  и
и  - коэффициенты пропорциональности;
- коэффициенты пропорциональности;  - постоянная ДПТ (
- постоянная ДПТ (  - число пар полюсов;
- число пар полюсов; 
 - число активных проводников обмотки якоря;
- число активных проводников обмотки якоря;  - число пар параллельных ветвей обмотки якоря );.
- число пар параллельных ветвей обмотки якоря );. :
:  , где
, где  - конструктивный коэффициент двигателя,
- конструктивный коэффициент двигателя,  - магнитный поток, Вб.
- магнитный поток, Вб. :
:  (3.2)
(3.2) имеет место режим идеального холостого хода и при этом
имеет место режим идеального холостого хода и при этом (3.3)
(3.3) , а это в свою очередь ведет к снижению
, а это в свою очередь ведет к снижению  имеет место режим короткого замыкания, при котором, как следует из (3.2), ток короткого замыкания (называемый также пусковым током)
имеет место режим короткого замыкания, при котором, как следует из (3.2), ток короткого замыкания (называемый также пусковым током) . (3.4)
. (3.4) , когда
, когда  , и оно может в десятки раз превышать величину номинального значения
, и оно может в десятки раз превышать величину номинального значения  тока якоря двигателя, т. к.
тока якоря двигателя, т. к. 
 , поэтому якорная обмотка может быстро перегреться и выйти из строя. Кроме того, большие токи негативно влияют и на работоспособность щеточно-коллекторного узла.
, поэтому якорная обмотка может быстро перегреться и выйти из строя. Кроме того, большие токи негативно влияют и на работоспособность щеточно-коллекторного узла. определяется коэффициентом перегрузки по току
определяется коэффициентом перегрузки по току , (3.5)
, (3.5) . (3.6)
. (3.6) так как это представление на рис. 3.8.
так как это представление на рис. 3.8.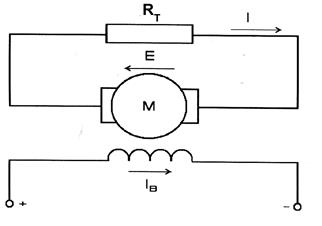
 , (3.12)
, (3.12) - тормозной момент.
- тормозной момент. . (3.13)
. (3.13)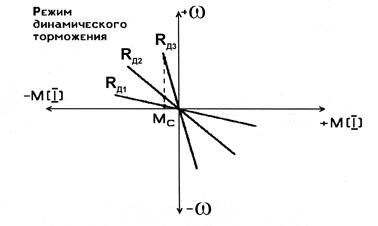
 <
<  <
<  .
. , (3.14)
, (3.14) .
. . (3.15)
. (3.15)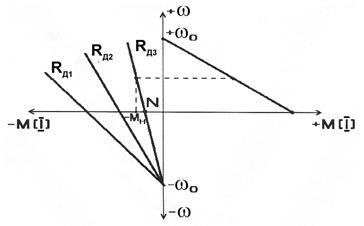

 Не допускается работа обучающихся со стендом при снятых панелях корпуса стенда.
Не допускается работа обучающихся со стендом при снятых панелях корпуса стенда. для каждого значения тока возбуждения из выражения для углового скорости идеального холостого хода:
для каждого значения тока возбуждения из выражения для углового скорости идеального холостого хода:  ,
,  .
. При выполнении действий по следующему пункту следует внимательно следить за показаниями амперметров PA1 и PA2, не допуская превышения значениями токов
При выполнении действий по следующему пункту следует внимательно следить за показаниями амперметров PA1 и PA2, не допуская превышения значениями токов  и
и  допустимых значений в 15А и 20 А соответственно (в зависимости от того, что наступит быстрее ). Нарушение этого ограничение может привести к перегоранию добавочных сопротивлений или перегрузке якоря.
допустимых значений в 15А и 20 А соответственно (в зависимости от того, что наступит быстрее ). Нарушение этого ограничение может привести к перегоранию добавочных сопротивлений или перегрузке якоря.