
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Уравнение механической характеристики ДПТ с НВ
С учетом третьего уравнения в (4.1) уравнение (3.2) можно переписать в виде зависимости
Данное уравнение определяет зависимость угловой скорости вращения от момента на валу двигателя. Т.к. в статике вращающий момент Следует отметить, что величина электромагнитного момента Коэффициент пропорциональности Графическое изображение механической характеристики
Из выражения (3.7) следует, что графически механическая характеристика ДПТ с НВ может быть представлена прямой линией с двумя характерными точками - скоростью холостого хода и моментом короткого замыкания
C введением добавочного сопротивления По аналогии с электромеханическими характеристиками различают естественную и искусственные механические характеристики. Уравнения механической характеристики можно переписать в виде
где Способы регулирования угловой скорости вращения
Из уравнения механической характеристики (3.7) следует, что принципиально Следует отметить, что естественный перепад угловой скорости вращения с увеличением нагрузки Диапазон регулирования скорости вращения
Одним из основных параметров, характеризующих способы регулирования угловой скорости вращения, является диапазон регулирования
Как правило, диапазон регулирования представляют в числах в виде соотношения, например, 100: 1 и т. п. Естественно диапазон регулирования увязывается с требуемой стабильностью скорости при заданном отклонении момента. Регулирование скорости вращения изменением питающего напряжения Как следует из выражения (3.7) при изменении питающего напряжения можно получить семейство параллельных механических характеристик (рис. 3.3).
Рис. 3.3. Механические характеристики ДПТ с НВ при различных напряжениях на якоре:
Фактически имеется возможность только уменьшать напряжение питания якоря относительно его номинального значения
Реостатное регулирование угловой скорости вращения ДПТ с НВ
Это один из простейших способов регулирования угловой скорости вращения. Схема его реализации представлена на рис. 3.1. Из уравнения механической характеристики (3.7) следует, что при постоянном моменте сопротивления Жесткость механических характеристик уменьшается с увеличением величины добавочного сопротивления Диапазон регулирования скорости практически не превышает 2: 1. Способ характеризуется большими тепловыми потерями на добавочном сопротивлении Популярное:
|
Последнее изменение этой страницы: 2016-08-31; Просмотров: 1134; Нарушение авторского права страницы
 - которая представляет собой механическую характеристику ДПТ:
- которая представляет собой механическую характеристику ДПТ:  (3.7)
(3.7) равен моменту сопротивления
равен моменту сопротивления  на налу ДПТ, то это уравнение определяет зависимость
на налу ДПТ, то это уравнение определяет зависимость  от
от  можно считать постоянным для тех ДПТ с НВ, у которых имеются компенсационные обмотки или в случае, когда можно пренебречь влиянием реакции якоря на величину
можно считать постоянным для тех ДПТ с НВ, у которых имеются компенсационные обмотки или в случае, когда можно пренебречь влиянием реакции якоря на величину  . В общем же случае влияние поперечной реакции якоря на величину магнитного потока
. В общем же случае влияние поперечной реакции якоря на величину магнитного потока  , который также называется пусковым. Величина
, который также называется пусковым. Величина  (3.8)
(3.8) в цепь якоря жесткость механических характеристик также падает, что с успехом используется при регулировании скорости вращения ДПТ.
в цепь якоря жесткость механических характеристик также падает, что с успехом используется при регулировании скорости вращения ДПТ. , (3.9)
, (3.9) .
. ,
,  .
. не входит в понятие регулирования
не входит в понятие регулирования  . который в электроприводе определяется как отношение максимальной скорости вращения
. который в электроприводе определяется как отношение максимальной скорости вращения  к минимальной
к минимальной  :
:  . (3.10)
. (3.10)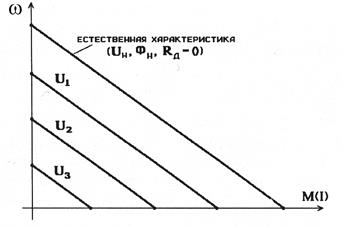

 , т.е. возможно регулировать угловую скорость вращения только вниз от основной (соответствующей естественной характеристике). Это обусловлено тем, что уже на стадии своего проектирования ДПТ рассчитывается на конкретное номинальное напряжение, превышение которого может привести к пробою изоляции.
, т.е. возможно регулировать угловую скорость вращения только вниз от основной (соответствующей естественной характеристике). Это обусловлено тем, что уже на стадии своего проектирования ДПТ рассчитывается на конкретное номинальное напряжение, превышение которого может привести к пробою изоляции.