|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
ПРОЕКТНО-КОНСТРУКТОРСКАЯ ЧАСТЬ
Студент: __________________________ /Рословец П.В., ПС1-122/
Введение В рамках данной части дипломной работы рассмотрена конструкция динамически настраиваемого гироскопа с газодинамической опорой ротора КИНД05-091, разработанного в Согласно заданию, в системе SolidWorks разработана твердотельная модель ДНГ с ГДО с целью получения из неё массовых характеристик элементов конструкции. Значения моментов инерции некоторых элементов необходимы для подстановки в уравнения математической модели, выведенные в рамках исследовательской части данной работы. Твердотельная модель ДНГ КИНД05-091 представлена на рис. 2.1.
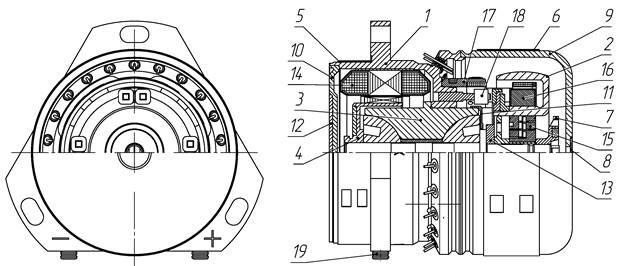
Рис. 2.1. Твердотельная модель ДНГ с ГДО (КИНД05-091) Описание конструкции ДНГ с ГДО На рис. 2.2 представлена конструкция динамически настраиваемого гироскопа с газодинамической опорой ротора.
Рис. 2.2. Конструкция ДНГ с ГДО (КИНД05-091) Основные элементы конструкции:
С целью повышения технологичности сборки, а также удобства регулировки в приборе принята следующая конструктивно-компоновочная схема: консольная однодвигательная, с разделением полости двигателя от полости маховика стенкой корпуса, являющейся одновременно магнитным экраном. Корпус прибора с закреплёнными на нём статором двигателя 14 и статорами датчиков момента (ДМ) 17 и торцевых датчиков угла (ДУ) 18 представляет собой блок статоров 1. В корпус блока статоров вклеена втулка газодинамической С одной стороны корпус прибора закрывается кожухом 9, а На корпус прибора и на кожух наклеены нагреватели 5, 6. Корпус прибора Корпус (рис. 2.3) состоит из трёх частей: корпусной детали, входящей в блок статоров, кожуха и крышки. Они выполнены из магнитомягкого материала, поэтому корпус обеспечивает защиту прибора от внешнего магнитного поля. Детали корпуса соединяются лазерной сваркой. Внутренняя полость прибора заполняют гелием, создавая давление 380 мм рт.ст. В целях обеспечения герметичности для связи между внутренними и внешними участками цепей питания и сигнальных цепей используются миниатюрные стеклянно-коваровые гермовыводы. Для точного базирования гироскопа по месту установки в его корпус вставлено два упора, закрепление осуществляется по трём отверстиям во фланце корпуса.
Рис. 2.3. Корпус ДНГ
Двигатель В приборе применён трёхфазный синхронный гистерезисный двигатель (рис. 2.4). Частота вращения – 30 000 об/мин при питании частотой 1000 Гц. Использование синхронного двигателя обеспечивает стабильность кинетического момента. Пакет статора клееный, статор имеет две пары полюсов. Для сведения к минимуму газообмена между статором двигателя и рабочим зазором ГДО обмотка статора пропитана малогазящим компаундом и закрыта кожухом. Ротор расположен на ведущем валу, его пакет – паяный. Ротор имеет элемент динамической балансировки в виде кольцевого пояска легкоплавкого сплава.
Рис. 2.4. Двигатель ДНГ
Маховик (ротор и подвес) Маховик является главным элементом динамически настраиваемого гироскопа. Его конструкция представлена на рис. 2.5. Ротор закреплён на валу через внутренний карданов подвес, который выполнен из единого куска специально разработанного сплава методом электроэрозионной обработки и содержит два промежуточных кольца, так что такой двухколечный подвес представляет собой по-существу два параллельно работающих идентичных кардана, развернутых один относительно другого на 90° вокруг оси вала. Ротор имеет возможность отклоняться относительно вала благодаря деформации упругих перемычек подвеса. Угол наклона маховика ограничивается кольцевым упором, который приклеен к подвесу. Маховик одновременно выполняет роль роторов датчиков момента и торцевых датчиков угла (ДУ). Для этого он содержит кольцевой постоянный магнит, закрытый кожухом, и втулку из магнитомягкого материала – ротор ДМ, а также деталь ротора ДУ, которая защищена от магнитных полей рассеяния датчиков момента экраном. Для динамической настройки в кольцах подвеса предусмотрены отверстия для грузов, которые вставляются в подвес без люфта и фиксируются лазерной сваркой. Балансировка осуществляется снятием материала в канавках на боковой поверхности ротора.
Рис. 2.5. Маховик ДНГ Газодинамическая опора В приборе применена газодинамическая опора ротора (рис. 2.6), что позволило увеличить его точность и повысить ресурс. В рабочем режиме между подвижной и неподвижной поверхностями опоры создается газовый зазор, который исключает непосредственный контакт между поверхностями подвеса. При этом отсутствует износ деталей опоры, следовательно, не изменяется балансировка вращающейся части, и, кроме того, отсутствует сухое трение. Рабочие поверхности опоры – полусферические. Втулка с внутренней полусферической поверхностью неподвижна, вклеена в корпус. Рабочие поверхности покрыты износостойким покрытием из нитрида титана. Полусферы ГДО закреплены на валу посредством клеевого соединения. На их поверхности напылены износостойкие покрытия из нитрида титана и алмазоподобного углерода, методом электроэрозии на полусферах ГДО нанесены локсодромические профилирующие канавки (глубиной 3 – 4 мкм), обеспечивающие в заданных условиях осевую несущую способность и устойчивость вращения ротора. Распорная втулка обеспечивает требуемый осевой зазор в опоре. Радиальный зазор получают подбором полусфер и втулки по радиусам рабочих поверхностей. Рабочий зазор составляет 1, 5 – 2, 0 мкм. Для обеспечения работы опоры во всём диапазоне температур
Рис. 2.6. Газодинамическая опора Датчики момента В гироскопе установлены магнитоэлектрические датчики момента (рис. 2.7). Датчики по обеим осям имеют общий ротор, представляющий собой монолитный кольцевой магнит, входящий в состав маховика. Статоры датчиков момента приклеены к латунной детали, закреплённой на корпусе, и служащей для отвода тепла от обмоток ДМ при работе гироскопа в условиях больших скоростей, т.е. при больших токах. Каждый из статоров датчика момента состоит из двух последовательно соединенных катушек основной (измерительной) обмотки и так же соединённых катушек вспомогательной обмотки. Основная обмотка используется в режиме измерения, а дополнительная задействуется при испытаниях. Для регулировки крутизны датчиков момента служат прокладки между статором и латунной деталью. На латунную деталь намотана катушка, являющаяся термодатчиком датчика момента.
Рис. 2.7. Магнитоэлектрические датчики момента
Датчики угла Для регистрации угла поворота маховика в гироскопе применены индуктивные датчики угла (рис. 2.8). Неподвижная (статорная) часть датчика угла представляет собой П-образный сердечник из металлокерамики, на который намотаны две одинаковые катушки, соединённые последовательно. ДУ по каждому из каналов содержит два таких сердечника с катушками, расположенные диаметрально. Датчики угла питаются напряжением 2, 5 В частотой 32 кГц. Обмотки вместе с балансировочными резисторами образуют мостовую схему, съём выходного сигнала датчика угла осуществляется с её диагонали, образованной средними точками обмоток. Статоры датчиков угла наклеены на корпус, кольцевой ротор – общий для всех датчиков – входит в состав маховика. Величина крутизны ДУ регулируется прокладкой между фланцем вала и маховиком. При центральном положении маховика воздушные зазоры между ротором и сердечниками датчика угла равны, индуктивности обмоток одинаковы и мост сбалансирован. При наклоне маховика указанные воздушные зазоры изменяются: для одного сердечника воздушный зазор увеличивается, а для другого – уменьшается. При этом индуктивность одной обмотки уменьшается, а другой – увеличивается. В результате баланс моста нарушается и на выходной диагонали мостовой схемы появляется напряжение, пропорциональное углу поворота маховика. Изменение направления поворота маховика вызывает изменение фазы выходного напряжения на 180°, т. е. характеристика датчика угла является реверсивной. Выбранные датчики угла не создают относительно измерительной оси момента сухого трения, т. к. являются бесконтактными, а моменты, обусловленные силами притяжения ротора к сердечникам, направлены в противоположные стороны и поэтому почти полностью взаимно компенсируются.
Рис. 2.8. Индуктивные датчики угла Популярное:
|
Последнее изменение этой страницы: 2016-08-31; Просмотров: 747; Нарушение авторского права страницы