
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Исследование полученной модели
Исследуем влияние угловой жёсткости скоростной опоры на функционирование ДУС на ДНГ КИНД05-091 в среде Matlab Simulink. Для этого построим в Simulink полученную математическую модель и добавим к ней два канала обратной связи (приложение Б). Теперь, используя модель, построенную в Simulink, проведём виртуальный эксперимент: предположим, что измерительная ось Х прибора направлена вертикально вверх, а ось Y – на север (рис. 3.10).
Рис. 3.10. Ориентация прибора относительно осей географического трёхгранника ξ η ζ Тогда канал Х прибора измеряет вертикальную составляющую угловой скорости суточного вращения Земли, а канал Y – горизонтальную:
где U – угловая скорость суточного вращения Земли, U ≈ 7, 27·10-5 рад/с; φ – географическая широта местности, φ ≈ 56° для Москвы. При этом в обмотках датчиков момента должны протекать токи:
Результаты моделирования представлены на графиках ниже.
Рис. 3.11. Изменение токов ОС
Рис. 3.12. Изменение углов наклона маховика относительно корпуса
Рис. 3.13. Изменение углов наклона вала относительно корпуса
Из графика, представленного на рис. 3.11, видно, что токи в обмотках датчиков момента в установившемся режиме принимают расчётные значения (34). Это говорит об адекватности построенной модели. При этом маховик остаётся отклонённым относительно корпуса (рис. 3.12) на некоторую малую величину статической ошибки (порядка 10-4 дуг. мин.). Из графика рис. 3.13 видно, что вал отклонён относительно корпуса (наклон порядка 2·10-6 дуг. мин.) и при этом совершает колебания. Если ближе посмотреть на график углов наклона маховика относительно вала, можно увидеть его нутационные колебания
Рис. 3.14. Нутационные колебания маховика Параметры нутационных колебаний маховика:
Частоту нутационных колебаний маховика можно рассчитать по формуле:
Видим, что расчётное значение нутационной частоты совпадает с полученным при моделировании. Если ближе посмотрим на график колебаний вала относительно корпуса, то увидим, что помимо колебаний на собственной частоте опоры присутствуют также биения на нутационной частоте привода (рис. 3.15).
Рис. 3.15. Колебания и биения вала относительно корпуса Параметры колебаний и биений вала:
Нутационную частоту привода можно оценить по формуле:
Частота собственных колебаний в опоре рассчитывается:
Расчётные значения частот Сравнивая графики рис. 3.14 и рис. 3.15, стоит отметить, что диапазон изменения углов наклона маховика относительно вала на два порядка превышает диапазон изменения углов наклона вала относительно корпуса при заданной жёсткости скоростной опоры. В конечном итоге, колебания вала относительно корпуса складываются из нутационных колебаний маховика относительно вала и колебаний вала относительно корпуса и выглядят, как представлено на графике рис. 3.16.
Рис. 3.16. Колебания вала относительно корпуса. Датчики угла фиксируют углы наклона вала относительно корпуса и выдают соответствующие сигналы в каналы обратной связи. Сигналы, снимаемые из обмоток датчиков момента, (рис. 3.11) при ближайшем рассмотрении выглядят, как представлено на графике рис. 3.17
Рис. 3.17. Колебания выходного сигнала Из графика рис. 3.17 видно, что в выходном сигнале присутствуют колебания на нутационной частоте маховика. Параметры этих колебаний:
Коэффициент передачи нутационных колебаний через канал обратной связи равен:
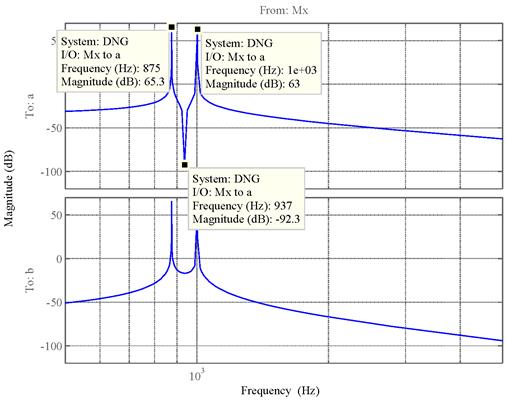
При действии на корпус прибора вибрации она через опору передаётся на маховик. Оценим действие вибрации на функционирование ДНГ. Представим, что на вал вокруг оси X действует переменный возмущающий момент, вызванный наличием внешней вибрации. Этот момент вызывает колебания маховика относительно корпуса на частоте возмущения. На амплитудно-частотной характеристике (АЧХ), представленной на рис. 3.18, по оси абсцисс в логарифмическом масштабе отложена частота возмущающего момента, приложенного к валу по оси Х, а по оси ординат – отношение угла наклона маховика относительно корпуса вокруг соответствующей оси к амплитуде возмущающего момента, выраженное в децибелах. Таким образом, графики рис. 3.18 характеризуют реакцию прибора на возмущение, действующее по оси X: верхний – реакцию по углу α (наклон вокруг X), а нижний – реакцию по углу β (наклон вокруг Y).
Рис. 3.18. АЧХ прибора, характеризующая зависимость углов наклона маховика относительно корпуса от момента, приложенного к валу Анализируя АЧХ рис. 3.18, можно выделить следующие характерные частоты: – – – Интересным является тот факт, что собственная частота опоры
Как отмечалось ранее, при работе ДНГ возникают вибрации на частотах кратных частоте вращения ротора. Наиболее ярко проявляются колебания на двойной частоте собственного вращения Резонанс со второй гармоникой возможен при двух значениях угловой жёсткости скоростной опоры:
Для предотвращения возникновения резонанса на двойной частоте вращения ротора при проектировании ДНГ нужно избегать подобных значений жёсткости скоростной опоры.
Рис. 3.19. АЧХ прибора, характеризующая зависимость углов наклона маховика относительно корпуса от момента, приложенного к валу Сравнивая АЧХ рис. 3.18 и 3.19, можно заметить, что снижение угловой жёсткости опоры ведёт к поднятию АЧХ, а следовательно, к снижению виброустойчивости ДНГ. Поэтому при проектировании стоит стремиться получить как можно большее значение жёсткости скоростной опоры, тем более, что это ведёт к увеличению её несущей способности. Заключение В результате проделанной работы методом Лагранжа II рода получена математическая модель динамически настраиваемого гироскопа, учитывающая угловую податливость скоростной опоры. На основе полученной модели в системе Matlab Simulink проведено исследование динамически настраиваемого гироскопа с газодинамической опорой ротора КИНД05-091, работающего в режиме датчика угловой скорости с перекрёстными обратными связями. В качестве параметров модели были заданы параметры этого прибора. Часть из них была взята из технических условий, часть получена в результате анализа твердотельной модели, остальные параметры были рассчитаны. Угловая жёсткость газодинамической опоры ротора была рассчитана исходя из её несущей способности и геометрических параметров. Её величина составила 600 Н∙ м/рад. Достоверность построенной модели проверена в системе Matlab Simulink путём виртуального эксперимента: заданы переносные угловые скорости движения основания прибора. При этом значения токов, протекающих в обмотках датчиков момента совпали с расчётными, что подтвердило адекватность модели. Исследование модели показало: 1. Анализ колебательных переходных процессов позволил выделить несколько собственных частот ДНГ:
2. Анализ частотных характеристик показал, что система имеет три резонансные частоты:
3. Показана возможность возникновения резонанса на двойной частоте вращения маховика. Это возможно при значениях угловой жёсткости скоростной опоры 50, 5 и 65 Н∙ м/рад.
4. Показано, что снижение угловой жёсткости опоры ведёт к снижению виброустойчивости прибора.
Проведённые исследования показали, что при проектировании ДНГ по возможности следует обеспечивать большую величину угловой жёсткости скоростной опоры, при этом необходимо выбирать такую жёсткость, чтобы резонансные частоты системы не совпадали с двойной частотой вращения ротора. В рамках дальнейшего развития работы планируется сделать следующее: 1) учесть в модели вязкость газовой плёнки ГДО; 2) ввести в модель уравнение, описывающее собственное вращение вала; 3) ввести модель привода, обеспечивающего собственное вращение; 4) учесть неидеальность радиальной балансировки маховика и всей вращающейся части ДНГ.
Список литературы 1. Техническая документация на ДНГ КИНД05-091. 2. Новиков Л.З., Шаталов М.Ю. Механика динамически настраиваемых гироскопов // издательство «Наука», Москва, 1985 г. 3. Матвеев В.А., Подчезерцев В.П., Фатеев В.В. Гироскопические стабилизаторы на динамически настраиваемых вибрационных гироскопах: учебное пособие по курсу «Теория гироскопов и гиростабилизаторов» // издательство МГТУ имени Н.Э. Баумана, Москва, 2005 г. 4. Дубинин А.В., Смолян К.В. Зависимость несущей способности газодинамической опоры динамически настраиваемого гироскопа от зазоров в газодинамической опоре // Вестник МГТУ им. Н.Э. Баумана: электронное научно-техническое издание, 2012 г., №3 (3). 5. Пельпор Д.С., Матвеев В.А., Арсеньев В.Д. Динамически настраиваемые гироскопы: теория и конструкция // издательство «Машиностроение», Москва, 1988 г. 6. Пельпор Д.С., Матвеев В.А., Фатеев В.В. Динамически настраиваемые гироскопы: конструкция и расчёт. Учебное пособие для студентов дневного и вечернего отделений по курсу «Проектирование систем ориентации» // Типография МВТУ, Москва, 1985 г. 7. Щеглова Н.Н. Влияние коэффициента жёсткости газодинамической опоры на работы двухосного поплавкового датчика угловой скорости // Вестник МГТУ им. Н.Э. Баумана: электронное научно-техническое издание, 2013 г., №2 (14). 8. Дьяконов В.П. Mathematica 4.1/4.2/5.0 в математических и научно-технических расчетах // издательство «СОЛОН-Пресс», Москва, 2004 г. 9. Дьяконов В.П. MATLAB 6.5 SP1/7 + Simulink 5/6 в математике и моделировании // издательство «СОЛОН-Пресс», Москва, 2005 г. Популярное:
|
Последнее изменение этой страницы: 2016-08-31; Просмотров: 576; Нарушение авторского права страницы









 (дуг. мин.)
(дуг. мин.)
 (Гц)
(Гц)
 (Гц)
(Гц)

 (дуг. мин.) – размах биений
(дуг. мин.) – размах биений
 (Гц) – частота биений (нутационная)
(Гц) – частота биений (нутационная)
 (Гц) – частота колебаний (собственная)
(Гц) – частота колебаний (собственная)
 (Гц)
(Гц)
 (Гц)
(Гц)
 и
и  почти точно совпадают с полученными при моделировании.
почти точно совпадают с полученными при моделировании.

 (нА)
(нА)
 (Гц)
(Гц)
 (мА/дуг. мин.)
(мА/дуг. мин.)

 (Гц) – частота нутационных колебаний маховика, на ней возникает резонанс по оси, перпендикулярной к оси действия возмущения;
(Гц) – частота нутационных колебаний маховика, на ней возникает резонанс по оси, перпендикулярной к оси действия возмущения;  (Гц) – собственная частота опоры, на ней наблюдается антирезонанс;
(Гц) – собственная частота опоры, на ней наблюдается антирезонанс;  (Гц),
(Гц),  (Гц) – резонансные частоты, близкие к собственной частоте опоры.
(Гц) – резонансные частоты, близкие к собственной частоте опоры. не является резонансной, а даже наоборот – колебания на этой частоте, подавляются. При этом резонанс проявляется на частотах
не является резонансной, а даже наоборот – колебания на этой частоте, подавляются. При этом резонанс проявляется на частотах  ,
,  , лежащих вблизи неё.
, лежащих вблизи неё. Гц [1].
Гц [1]. (Н∙ м/рад),
(Н∙ м/рад),  (Гц) (рис.3.19)
при
(Гц) (рис.3.19)
при  (Н∙ м/рад),
(Н∙ м/рад),  (Гц)
(Гц)
 (Гц) – нутационная частота маховика;
(Гц) – нутационная частота маховика;  (Гц) – нутационная частота привода;
(Гц) – нутационная частота привода;  (Гц) – собственная частота опоры.
(Гц) – собственная частота опоры. (Гц),
(Гц),