
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Комплексные задачи повышенной трудности
88. С горизонтальной поверхности земли бросили мяч и он упал на землю со скоростью V = 9, 8 м/с по углом b = 300 к горизонту. Модуль вертикальной составляющей скорости в точке бросания был на 20% больше, чем в точке падения. Найти время полета мяча. Считать, что сила сопротивления движению мяча пропорциональна его скорости. [ 89. 90. 91. К вершине прямого кругового конуса прикреплена небольшая шайба с помощью нити длиной l. Вся система вращается вокруг оси конуса, расположенной вертикально. При каком числе оборотов в единицу времени шайба не будет отрываться от поверхности конуса? Угол при вершине конуса 2a = 1200. 92. 93. Воронка в виде прямого кругового конуса с углом 2a= 1200 при вершине вращается вокруг своей оси, расположенной вертикально. К краю воронки прикреплен с помощью нити небольшой шарик на расстоянии l от вершины конуса. С каким максимальным периодом должна вращаться система, чтобы нить не провисала при таком положении шарика?
Часть третья: Статика Основные термины и уравнения
В статике выделяются 2 условия равновесия тел. Первое условие равновесия – векторная сумма всех сил действующих на тело равна нулю:
Векторное равенство (3.1) равносильно системе трех скалярных равенств, получаемых из него проектированием на координатные оси. Иногда на практике достаточно плоской координатной системы и соответствующей системы всего лишь двух равенств-проекций. Моментом силы относительно точки О называется физическая величина, равная векторному произведению вектора силы и радиус вектора точки приложения этой силы (рис.):
При этом направление момента силы заменяют знаком «+» (если сила стремиться повернуть тело относительно точки опоры против (по) часовой стрелки) или «-» (в противном случае). Тогда сложение векторов моментов сил сводится к нахождению соответствующей алгебраической (т.е. с учетом знака) суммы их числовых значений. Второе условие равновесия – алгебраическая сумма моментов всех сил, действующих на тело, относительно какой-либо точки А равна нулю:
Методические указания. Надлежащий выбор точки А обеспечивает уменьшение количества неизвестных данных в уравнении за счет того, что момент неизвестной силы относительно выбранной точки равен нулю. В частности, например, если точка А лежит на линии действия этой силы. Среди задач можно выделить несколько групп: 1) задачи, которые решаются только по первому условию равновесия (например, брусок покоится на столе, т.е. вращение здесь невозможно); 2) задачи, которые решаются только по второму условию равновесия (задача- пример 2); 3) задачи, которые могут быть решены на основе только первого условия равновесия, и также на основе только второго условия равновесия (задача-пример 4); 4) задачи, которые решаются при совместном использовании двух условий равновесия.
Примеры решения задач Задача-пример 1. Две треугольные призмы касаются ребрами, при которых углы между гранями равны соответственно a и b. Сверху на них положили шар радиуса R массой m (рис). Определить силы, с которыми шар действует на каждую призму.
Проектируем его на оси. х: y: Получили два уравнения с двумя неизвестными. Обратите внимание, что каждое уравнение содержит две переменные N1 и N2. Выразим N2 из первого уравнения и подставим во второе:
аналогично получаем II-й способ. Записываем второе условие равновесия шара относительно точек опоры А и В. Учтем, что момент силы N1 относительно точки А равен нулю, а момент силы N2 относительно точки В равен нулю. Получаем в скалярной форме два равенства соответственно: Видим, что полученные равенства являются уравнениями лишь с одной переменной. Откуда выражаем искомые величины. Ответ: Задача-пример 2. Один конец твердого стержня массой m шарнирно закреплен в точке А, а другой удерживается веревкой ВС? Найти натяжение веревки, если треугольник АВС равносторонний.
Определить плечо силы Ответ: mg/2. ¨
ЗАДАЧИ к разделу «Статика»
1. Светофор массой 4 кг подвешен над дорогой на двух одинаковых тросах, угол между которыми составляет 1200. Считая тросы невесомыми, найти их натяжение. Ускорение свободного падения принять равным 9, 8 м/с2. 2. Полый шарик из алюминия (r = 2700 кг/м3) в воде (r1 = 1000 кг/м3) имеет вес Р1 = 0, 24 Н, а в бензине (r2 = 700 кг/м3) Р2 = 0, 33 Н. Найти объем V1 полости. 3. Труба длиной 5 м и массой 40 кг лежит горизонтально на двух опорах. Одна из опор расположена на расстоянии 1 м от правого конца трубы. Какую минимальную силу нужно приложить к левому концу трубы, чтобы ее приподнять? 4. Лом весом 160 Н и длиной 2 м лежит на ящике шириной 1 м, выступая на края его на 0, 4 м и 0, 6 м. Какую минимальную силу нужно приложить к лому, чтобы приподнять длинный его конец? [60 Н] 5. На какую минимальную высоту может приподняться человек по невесомой лестнице, имеющей длину l и приставленную к гладкой стенке? Угол между лестницей и стенкой j, коэффициент трения о пол m. [ 6. 7. Шарнирный трехзвенник АВС удерживает в равновесии груз, подвешенный к шарнирному болту С. Под действием груза стержень АС сжат силой F2 = 25 Н. Заданы углы a = 600 и b = 450. Считая стержни АС и ВС невесомыми, определить усилие в стержне ВС. 8. Груз 1 весом 2 Н удерживается в равновесии двумя веревками АС и ВС, расположенными в вертикальной плоскости. Определить натяжение веревки ВС, если угол a = 300. 9. Кусок сплава меди и серебра весит в воздухе 2, 940 Н, а в воде – 2, 646 Н. Сколько серебра и меди в куске, выразить в граммах. [0, 083 г и 0, 217 г] 10. Сплошной однородный шар плавает на границе раздела двух несмешивающихся жидкостей, плотности которых равны 800 кг/м3 и 1000 кг/м3. Определить плотность тела, если в верхней жидкости находится 30% всего объема шара. [940 кг/м3] 11. Тело кубической формы плавает на поверхности ртути, причем в ртути находится 0, 6 всего объема тела. Какая часть тела будет погружена в ртуть, если поверх нее налить слой жидкости, закрывающей тело, плотность которой 3600 кг/м3. Плотность ртути 13 600 кг/м3. [0, 456] 12. Дубовый шар массой 0, 6 кг лежит на дне сосуда, наполовину погруженный в воду. Определить силу давления шара на дно сосуда. Плотность дуба 800 кг/м3, воды 1000 кг/м3. Принять g = 10 м/с2. [2, 25 Н]
Часть четвертая: Работа силы. Механическая энергия и количество теплоты. Импульс. Законы изменения и сохранения импульса и полной механической энергии.
Основные понятия и законы
Пусть на тело действует сила
[A] = Дж = Н× м. Здесь a - угол между векторами силы и перемещения (рис.). Произведение S× cosa соответствует величине перемещения вдоль направления действия силы, т.е. равна одной из составляющих вектора перемещения. Другая составляющая перпендикулярна действующей силе, а потому эта сила на таком перемещении работы не совершает:
Выделим несколько случаев, в которых работа не совершается или равна нулю: 1) тело перемещается, но нет действующей на него при этом силы (движение по инерции), т.е. S ¹ 0, F = 0; 2) сила действует, но тело не перемещается, т.е. F ¹ 0, S = 0; 3) сила действует перпендикулярно перемещению тела, т.е. F ¹ 0, S ¹ 0, но угол a = 900. В качестве примера случая 3) полезно запомнить следующее. Пусть имеется шарик, закрепленный на вертикальной нити и движущийся по окружности (в вертикальной – рис.а) или горизонтальной – рис.б) плоскости). Здесь сила (или ее проекция) направлена вдоль радиуса окружности, а элементарное перемещение к любой момент времени по отрезку касательной, т.е. они взаимноперпендикулярны и сила натяжения нити не совершает работы. Умение определять работу силы важно еще и потому, что от наличия или отсутствия работы внешних сил зависит будет ли изменяться механическая энергия тела или нет. Также сила реакции опоры в любой момент времени перпендикулярна опоре, по которой движется тело, и ее работа в таких условиях равна нулю всегда!
Замечание. Рассмотрим контрпример: человек, сидя на гладком сиденье автобуса, перемещается вместе с последним. Требуется ответить на вопрос: совершает ли в этом случае сила реакции (вертикальной) спинки сиденья работу по перемещению человека в горизонтальном направлении? … Однозначного ответа нет. Т.е. 1) если автобус движется равномерно, то указанная работа равна нулю (ответ НЕТ), как в первом случае равенства работы силы нулю – движение по инерции (см. выше), 2) при ускоренном движении автобуса имеем положительный ответ (ДА). И еще один момент: если сила и перемещение противоположно направлены, то угол a = 1800 и работа силы будет отрицательна. Т.е. работа может быть как положительной величиной, так и отрицательной, а потому потеря знака при ее определении будет считаться в ряде случаев серьезной ошибкой, особенно если речь идет о суммарной работе нескольких сил. Кроме того, важно различать понятия «работа силы А = - А¢ (4.2). Дальнейшее применение этой формулы будет значительно расширено при рассмотрении работы газов в термодинамике. Методические указания. Формула (4.1) применима лишь в том случае, когда сила постоянна по величине и по направлению. В противном случае аналогичную формулу записываем для элементарной работы и интегрируем:
Понятие «энергия» – одно из фундаментальных понятий физики. Энергия – мера движения материи (с позиции философии имеются в виду различные формы движения материи). Энергия - однозначная функция состояния системы, т.е. «любому переходу материальной системы из одного состояния в другое всегда соответствует строго определенное изменение энергиии» [Эвенчик Э.Е. Преподавание механики в курсе физики средней школы. Пособие для учителей. Изд. 2-е, переработ. и доп. - М.: Просвещение, 1971. – 160 с. – С. 134]. Энергия – это общая числовая характеристика конкретных физических форм движения материи: механической, тепловой, электрической и т.д., остающаяся в изолированной системе неизменной величиной при любых их взаимных превращениях. В связи с этим, работа силы равна величине энергии, переданной от одного тела к другому, или превращенной из одной формы в другую, т.е. служит мерой преобразования энергии. Замечание. В данном пособии мы рассматриваем лишь механическую работу и механические виды энергии. Кинетическая энергия (тела) – энергия (его) движения:
Из формулы-определения следует, что кинетическая энергия тела всегда – неотрицательная скалярная величина. Величина этой энергии для данного тела зависит только от его скорости, поэтому, учитывая относительность движения, можно получать различные результаты в разных ИСО. Прежде чем говорить о потенциальной энергии, уместно вспомнить, что силы бывают потенциальные (консервативные) и непотенциальные (диссипативные). Основные свойства потенциальных сил: работа силы зависит лишь от начального и конечного положения тела (иначе говоря, работа не зависит от формы траектории), работа по замкнутому контуру равна нулю; сила однозначно определяется скалярной функцией координат (потенциалом поля, обеспечивающего данный вид взаимодействия). Потенциальная энергия – энергия взаимодействия; скалярная величина (может быть отрицательной величиной). Потенциальная энергия системы тел определяется их взаимным расположением и характером сил взаимодействия между ними. Расчетная формула зависит от вида взаимодействия: 1) гравитационное: 2) упругое: 3) электростатическое: Полная механическая энергия – сумма кинетической и потенциальной энергии тела: Методические указания. Потенциальная энергия всегда относится к двум или более телам, т.к. для ее наличия необходимо их взаимодействие друг с другом. Когда же речь идет о потенциальной энергии одного конкретного тела, то надо понимать это как энергию ЕГО взаимодействия, но с каким-то другим телом. Если же потребуется найти полную механическую энергию, к примеру, двух тел с учетом их взаимодействия, то получим формулу:
Известно, что значение потенциальной энергии зависит от конфигурации системы взаимодействующих тел, т.е. от их взаимного расположения, и меняется при переходе системы от одной конфигурации к другой. Поэтому в ходе любого опыта можно измерить только изменение потенциальной энергии. И лишь принимая (совершенно произвольно) значение потенциальной энергии при каком-то взаимном расположении участников взаимодействия за ноль, становится возможным говорить об абсолютном значении потенциальной энергии. Иначе говоря, при анализе физических процессов (в ходе решения задач) важно не само значение потенциальной энергии тела, а величина ее изменения в этих процессах, а чаще всего будет рассматриваться убыль потенциальной энергии. С точки зрения математики термины «изменение» и «убыль» противоположны по знаку: изменение функции равно разности ее конечного и начального значений, а ее убыль равна разности начального и конечного значений. Это необходимо четко различать при формулировке и записи нижеследующих формул. Теорема о кинетической энергии: изменение кинетической энергии системы равно работе всех внешних сил. Имеем:
Работа потенциальных сил равна убыли потенциальной энергии:
И как следствие формул (4.8) и (4.9) получаем закон изменения полной механической энергии:
Методические указания. При решении задач надо помнить, что изменить полную механическую энергию тела (или системы тел) может работа сил трения, сопротивления и др. (внешняя приложенная сила и т.д.). При их отсутствии имеем дело с так называемым законом сохранения полной механической энергии тела, который записываем в форме:
Обратим внимание на тот факт, что силы трения всегда способствуют переходу энергии из механической во внутреннюю. Поэтому к ним нельзя применять разделение на «внутреннее» трение и «внешнее», т.е. силы трения всегда считаются внешними по отношению к механической системе силами. Потери механической энергии наблюдаются и при процессах с остаточными деформациями (например, неупругий удар).
Закон сохранения полной механической энергии тела при его переходе из одного положения в другое выполняется (имеет место) в следующих случаях:
2) непотенциальные силы есть, но их работа равна нулю.
В частности, сохранение механической энергии допускает переход ее из одного вида (потенциальной или кинетической) в другой, но только в равных количествах! Размерности работы и энергии одинаковы: [A] = [E] =Дж, и совпадают с размерностью другой физической величины – количество теплоты - количественной характеристики процесса теплообмена. Отсюда можно сделать вывод, что работа и теплота – два различных способа изменения энергии тела (или системы). Этот важный для понимания момент отражен и в первом начале термодинамики. Приведем формулы для подсчета количества теплоты в разных тепловых процессах: 1) нагревание (охлаждение): 2) плавление (кристаллизация): 3) испарение (конденсация): Еще одним следствием закона сохранения энергии является формула теплового баланса: в замкнутой системе общее количество отданного количества теплоты равно общему полученному количеству теплоты
Импульс тела (количество движения) – динамическая характеристика движения, связанная с силами, необходимыми для того, чтобы привести это тело в движение из состояния покоя или остановить его. По определению импульс тела – векторная физическая величина, равная произведению массы тела на его скорость: Закон изменения импульса тела (прямое следствие второго закона Ньютона): Величина В случае, когда правая часть (4.17) равна нулю, получаем форму закона сохранения импульса в векторном виде:
На основе формулы (4.17) выделяем случаи, в которых можно воспользоваться формулой (4.18): 1) 2) внешние силы есть, но они скомпенсированы; 3) 4) если какой-либо из пунктов 1)-3) имеет место в отношении какой-то оси, например, оси х, то сохраняется лишь проекция импульса на эту ось: р1х = р2х (4.18*). Методические указания. При решении задач на закон сохранения импульса надежнее следующее: там, где достаточно рассмотрения проекции импульса на некоторое направление, не стараться доказать выполнение и использовать закон сохранения импульса как вектора. Так как последний выполняется в случае изолированной системы (а таких систем в реальности нет, например, нельзя избавиться от силы тяжести для материальной частицы в пределах Земли) и в случае равенства нулю равнодействующей всех действующих на тело сил (НО… это условие должно выполняться в любой момент времени в процессе перехода тела из одного состояния в другое, а это иногда бывает вовсе не очевидно! ). Короче говоря, при решении задач чаще всего необходимо руководствоваться пунктом 4) с формулой (4.18*). Хотя отдельный тип задач все же рассчитан на формулу для векторов - (4.18) (например, в случае разрыва гранаты на осколки имеем дело с трехмерным вектором). Здесь же важно напомнить методическое требование: скорости (импульсы) всех тел или частей системы должны быть взяты относительно ОДНОЙ и ТОЙ ЖЕ ИСО для их включения в одно равенство! Закон изменения и сохранения импульса можно обобщить и на случай системы тел (Замечание. Тела при этом рассматриваются как материальные точки! ). Причем импульс системы может быть выражен через скорость ее центра масс. Центром масс (или центром инерции ) системы называется воображаемая точка С, положение которой зависит от распределения масс в системе и задается радиус-вектором по формуле:
mi и Записав 2-й закон Ньютона для системы в форме:
получаем закон движения центра масс. Т.е. центр масс системы движется как материальная точка, в которой сосредоточена масса всей системы и на которую действует равнодействующая всех внешних сил, приложенных к системе.
Примеры решения задач
Далее, записываем формулу изменения импульса: Вычисляем: Ответ: 0, 2 кг× м/с в перпендикулярном к стенке направлении от нее. ¨ Методические указания. Прежде всего заметим, что изменение векторной величины – тоже вектор. А поэтому ответ на вопрос задачи состоит из числового значения и описания его направления. Далее примечательно проанализировать полученный ответ. В частности, как можно без построения «треугольника импульсов» определить направление вектора изменения импульса тела? Чтобы ответить, необходимо обратиться к формуле (4.17): вектора, стоящие справа и слева от знака равенства одинаково направлены, т.е. изменение импульса всегда имеет такое же направление, как и сила, его вызывающая. В данном примере изменение импульса происходит под действием силы реакции опоры (стенки), которая, как известно, всегда перпендикулярна опоре и направлена от нее. Полученному в задаче значению равен и импульс силы реакции стенки, в соответствии с законом (4.17). Т.е. чтобы найти импульс силы, вовсе не обязательно знать ее значение и время ее действия. К тому же сила в течение промежутка времени своего действия на тело может быть далеко не постоянной по модулю величиной: в начале большей, а в конце меньшей!
Задача-пример 2. Конькобежец, стоя на коньках на льду, бросает груз массой 10 кг под углом 300 к горизонту со скоростью 5 м/с. Какова будет начальная скорость движения конькобежца, если его масса равна 64 кг? Перемещение конькобежца во время броска пренебречь.
Ответ: 0, 68 м/с в сторону от груза по горизонтали ¨ Методические указания. Возможны два варианта решения: 1) когда мы сразу можем точно установить (и обосновать выбор) истинное направление скорости после ее изменения, тогда изображаем ее на рисунке и в равенство входит модуль этой скорости, откуда его и находим; 2) истинное направление движения после события неизвестно, тогда на рисунке скорость не указывается или рисуется произвольно, а в равенство входит ее проекция на ось. Далее по найденному значению проекции, с учетом ее знака, дается ответ о значении и направлении искомой скорости. Решенная выше задача демонстрирует второй вариант.
Задача-пример 3. На какое расстояние сместится неподвижно стоящая на воде лодка, если человек массой m1 = 70 кг пройдет с носа лодки на корму? Длина лодки 2, 5 м, ее масса m2 = 100 кг. Сопротивлением воды пренебречь.
Относительно центра лодки (точки О) радиус вектор точки С меняет лишь направление: на противоположное (с «вправо» на «влево»), оставаясь (с учетом симметрии лодки и положения человека на ней до и после перехода) одинаковым по величине и равным в соответствии с формулой (4.19): Вычислим:
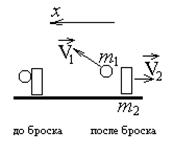
Задача-пример 4. На гладкой горизонтальной плоскости находится тело массы М (рис.) и на нем небольшая шайба массы m. Последней сообщили в горизонтальном направлении скорость v. На какую высоту (по сравнению с первоначальным уровнем) поднимется шайба после отрыва от тела М? Трения нет.
Популярное:
|
Последнее изменение этой страницы: 2017-03-08; Просмотров: 1753; Нарушение авторского права страницы
 ]
] За время полета мяча, брошенного под углом к горизонту, горизонтальная составляющая его скорости уменьшилась на 12% и мяч упал на землю на расстоянии 14 м от человека. Когда мяч бросили под тем же углом к горизонту со скоростью на 20% большей, чем в первом случае, то горизонтальная составляющая скорости мяча за время полета уменьшилась на 15%. На каком расстоянии от человека упал в последнем случае мяч? Считать, что сила сопротивления движению мяча пропорциональна его скорости. [S2 = 1, 5 S1 = 21 м]
За время полета мяча, брошенного под углом к горизонту, горизонтальная составляющая его скорости уменьшилась на 12% и мяч упал на землю на расстоянии 14 м от человека. Когда мяч бросили под тем же углом к горизонту со скоростью на 20% большей, чем в первом случае, то горизонтальная составляющая скорости мяча за время полета уменьшилась на 15%. На каком расстоянии от человека упал в последнем случае мяч? Считать, что сила сопротивления движению мяча пропорциональна его скорости. [S2 = 1, 5 S1 = 21 м] Мяч, брошенный с горизонтальной поверхности земли под углом 600 к горизонту со скоростью 10 м/с, упал на землю, имея вертикальную составляющую скорости по абсолютной величине на 30% меньше, чем при бросании. Найти время полета мяча. Считать, что сила сопротивления движению мяча пропорциональна его скорости. [
Мяч, брошенный с горизонтальной поверхности земли под углом 600 к горизонту со скоростью 10 м/с, упал на землю, имея вертикальную составляющую скорости по абсолютной величине на 30% меньше, чем при бросании. Найти время полета мяча. Считать, что сила сопротивления движению мяча пропорциональна его скорости. [  ]
] Шарик массы m подвешен на нити длиной l. Его отклонили от положения равновесия до высоты точки подвеса и отпустили. При каком значении угла a (угол между нитью и вертикалью) нить оборвется, если известно, что нить выдерживает удвоенный вес шарика?
Шарик массы m подвешен на нити длиной l. Его отклонили от положения равновесия до высоты точки подвеса и отпустили. При каком значении угла a (угол между нитью и вертикалью) нить оборвется, если известно, что нить выдерживает удвоенный вес шарика?  (3.1)
(3.1) . Направление вектора
. Направление вектора  совпадает с направлением поступательного движения правого винта при его вращении от
совпадает с направлением поступательного движения правого винта при его вращении от  к
к  , а модуль равен:
, а модуль равен:  (3.2)
(3.2) 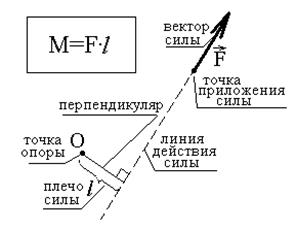 Т.е. момент силы
Т.е. момент силы  – векторная физическая величина. Часто при решении задач моментом силы называют лишь числовое значение вектора
– векторная физическая величина. Часто при решении задач моментом силы называют лишь числовое значение вектора  , тогда говорят: момент силы равен произведению модуля этой силы на ее плечо. Как момент силы, так и плечо силы берутся относительно некоторой выделенной точки О (точка опоры). Плечом силы относительно точки О называется кратчайшее расстояние от этой точки до линии действия этой силы. Как известно из математики, кратчайшее расстояние от точки до прямой есть длина перпендикуляра, опущенного из этой точки на прямую.
, тогда говорят: момент силы равен произведению модуля этой силы на ее плечо. Как момент силы, так и плечо силы берутся относительно некоторой выделенной точки О (точка опоры). Плечом силы относительно точки О называется кратчайшее расстояние от этой точки до линии действия этой силы. Как известно из математики, кратчайшее расстояние от точки до прямой есть длина перпендикуляра, опущенного из этой точки на прямую. (3.3)
(3.3)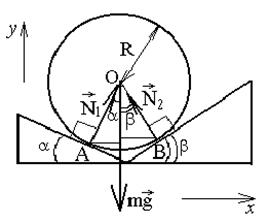
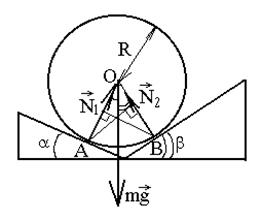 Решение. I-й способ. Записываем первое условие равновесия шара:
Решение. I-й способ. Записываем первое условие равновесия шара: 
 ;
;  .
. ,
,  Þ
Þ  ,
,  .
.
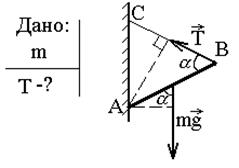 Решение. На стержень действуют три силы: сила тяжести, сила натяжения веревки и сила реакции
Решение. На стержень действуют три силы: сила тяжести, сила натяжения веревки и сила реакции  шарнира в точке А. Направление последней из них на начальном этапе решения определить невозможно (его можно рассчитать! ). Поэтому первое условие равновесия использовать для решения задачи не представляется возможным из-за неизвестности проекций этой силы.
шарнира в точке А. Направление последней из них на начальном этапе решения определить невозможно (его можно рассчитать! ). Поэтому первое условие равновесия использовать для решения задачи не представляется возможным из-за неизвестности проекций этой силы. , по рисунку из геометрических соображений определяем плечи сил и получаем равенство:
, по рисунку из геометрических соображений определяем плечи сил и получаем равенство:  , откуда
, откуда  .
. ]
]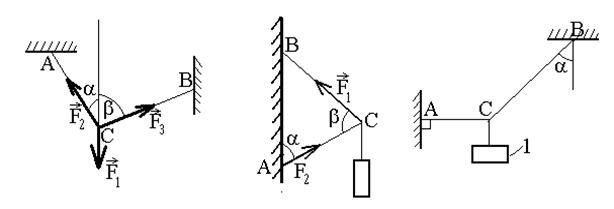 Определить модуль силы
Определить модуль силы  натяжения троса ВС, если известно, что натяжение троса АС равно F2 = 15 Н. В положении равновесия углы a = 300 и b = 750.
натяжения троса ВС, если известно, что натяжение троса АС равно F2 = 15 Н. В положении равновесия углы a = 300 и b = 750. . Физическая величина, равная скалярному произведению вектора силы на вектор соответствующего перемещения, называется работой этой силы по перемещению тела:
. Физическая величина, равная скалярному произведению вектора силы на вектор соответствующего перемещения, называется работой этой силы по перемещению тела: 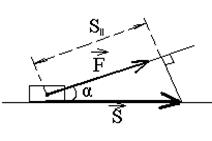
 = F× S× cosa = F× Sú ú (4.1),
= F× S× cosa = F× Sú ú (4.1), 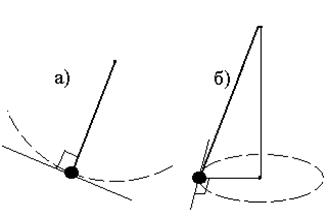
 , где угол
, где угол  тоже может быть функцией перемещения, т.е. различен в разных участках перемещения тела.
тоже может быть функцией перемещения, т.е. различен в разных участках перемещения тела. (4.3).
(4.3). (4.4), где
(4.4), где  - сила тяжести, действующая на тело,
- сила тяжести, действующая на тело,  - высота тела относительно выбранного нулевого уровня отсчета потенциальной энергии;
- высота тела относительно выбранного нулевого уровня отсчета потенциальной энергии;  (4.5) - потенциальная энергия сжатой или растянутой пружины (
(4.5) - потенциальная энергия сжатой или растянутой пружины (  - величина деформации пружины с коэффициентом упругости
- величина деформации пружины с коэффициентом упругости  ). За нулевой уровень принято положение недеформированного состояния;
). За нулевой уровень принято положение недеформированного состояния;  (4.6) - потенциальная энергия заряда
(4.6) - потенциальная энергия заряда  , находящегося в точке поля с потенциалом
, находящегося в точке поля с потенциалом  . Если поле создано другим точечным зарядом Q, то за нулевой уровень отсчета потенциала часто принимают точку, находящуюся от Q на расстоянии, равном бесконечности (где поле отсутствует).
. Если поле создано другим точечным зарядом Q, то за нулевой уровень отсчета потенциала часто принимают точку, находящуюся от Q на расстоянии, равном бесконечности (где поле отсутствует). (4.7).
(4.7). (4.7*).
(4.7*). (4.8).
(4.8). (4.9).
(4.9). (4.10).
(4.10). - энергии в любых двух состояниях равны (4.11). И далее с учетом конкретного условия задачи расписываем левую и правую части этого равенства, не выходя за его пределы. Таким образом, оговорки в условии «силу сопротивления не учитывать» или «трением пренебречь» напоминают о возможности использования формулы (4.11).
- энергии в любых двух состояниях равны (4.11). И далее с учетом конкретного условия задачи расписываем левую и правую части этого равенства, не выходя за его пределы. Таким образом, оговорки в условии «силу сопротивления не учитывать» или «трением пренебречь» напоминают о возможности использования формулы (4.11).
 1) непотенциальные силы отсутствуют;
1) непотенциальные силы отсутствуют;  (4.12), где
(4.12), где  - теплоемкость тела (Дж/К),
- теплоемкость тела (Дж/К),  - удельная теплоемкость вещества (Дж/(кг× К)),
- удельная теплоемкость вещества (Дж/(кг× К)),  - изменение температуры;
- изменение температуры;  (4.13), где
(4.13), где  - удельная теплота плавления вещества,
- удельная теплота плавления вещества,  - масса расплавленного (затвердевшего) вещества;
- масса расплавленного (затвердевшего) вещества;  (4.14), где
(4.14), где  - удельная теплота парообразования вещества,
- удельная теплота парообразования вещества,  (4.15). Эта формула характеризует передачу энергии от одних частей изолированной системы к другим в процессе теплообмена.
(4.15). Эта формула характеризует передачу энергии от одних частей изолированной системы к другим в процессе теплообмена. (4.16). Отсюда направление импульса всегда совпадает с направлением скорости движения тела, т.к. коэффициент-масса – положительное число.
(4.16). Отсюда направление импульса всегда совпадает с направлением скорости движения тела, т.к. коэффициент-масса – положительное число. (4.17) - изменение импульса тела равно импульсу действующей силы.
(4.17) - изменение импульса тела равно импульсу действующей силы. называется импульсом силы. Таким образом, изменить импульс тела может лишь сила, действующая на него в течение некоторого промежутка времени.
называется импульсом силы. Таким образом, изменить импульс тела может лишь сила, действующая на него в течение некоторого промежутка времени. или
или  (4.18) - импульс тела в начальном и конечном состояниях (положениях) равны.
(4.18) - импульс тела в начальном и конечном состояниях (положениях) равны. внешние силы отсутствуют;
внешние силы отсутствуют;  внешние силы не скомпенсированы, но время их действия достаточно мало, т.е.
внешние силы не скомпенсированы, но время их действия достаточно мало, т.е.  (например, удар, сцепка вагонов, прыжок, выстрел, разрыв гранаты на осколки и т.д.);
(например, удар, сцепка вагонов, прыжок, выстрел, разрыв гранаты на осколки и т.д.);  (4.19), где n – число тел в системе,
(4.19), где n – число тел в системе,  - масса и радиус-вектор i-того тела. Дифференцированием формулы (4.19) легко показать, что импульс системы равен произведению массы системы на скорость ее центра масс:
- масса и радиус-вектор i-того тела. Дифференцированием формулы (4.19) легко показать, что импульс системы равен произведению массы системы на скорость ее центра масс:  (4.20).
(4.20).
 А в соответствии с законом сохранения импульса при выполнении одного из условий получим: центр масс системы либо движется равномерно, либо покоится.
А в соответствии с законом сохранения импульса при выполнении одного из условий получим: центр масс системы либо движется равномерно, либо покоится.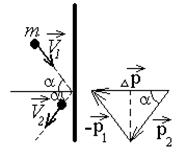 Задача-пример 1. Тело массой 20 г движется со скоростью 10 м/с под углом 600 к вертикальной стенке. Определить изменение импульса тела в результате абсолютно упругого столкновения его со стенкой.
Задача-пример 1. Тело массой 20 г движется со скоростью 10 м/с под углом 600 к вертикальной стенке. Определить изменение импульса тела в результате абсолютно упругого столкновения его со стенкой.

 Решение: Делаем рисунок: указываем направление скорости тела до и после удара о стенку. Напраление импульса совпадает с направлением соответствующей скорости. Т.к. удар о стенку считается абсолютно упругим, то величина скорости (а значит и импульса) не меняется. Изменением направления скорости показано на рисунке.
Решение: Делаем рисунок: указываем направление скорости тела до и после удара о стенку. Напраление импульса совпадает с направлением соответствующей скорости. Т.к. удар о стенку считается абсолютно упругим, то величина скорости (а значит и импульса) не меняется. Изменением направления скорости показано на рисунке. и на ее основе строим «треугольник импульсов», из которого геометрически находим длину нужной стороны, равную искомой физической величине: т.к.
и на ее основе строим «треугольник импульсов», из которого геометрически находим длину нужной стороны, равную искомой физической величине: т.к.  , то
, то  - модуль изменения импульса. А направлен вектор
- модуль изменения импульса. А направлен вектор  перпендикулярно стенке от нее.
перпендикулярно стенке от нее. (кг× м/с).
(кг× м/с).
 Решение: На рисунке указываем векторы импульсов тел до и после изменения их движения и положительное направление координатной оси ( по горизонтали
Решение: На рисунке указываем векторы импульсов тел до и после изменения их движения и положительное направление координатной оси ( по горизонтали  в сторону полета груза). В интересующем нас горизонтальном направлении на систему тел «конькобежец – груз» внешние силы не действуют, поэтому можно воспользоваться формулой
в сторону полета груза). В интересующем нас горизонтальном направлении на систему тел «конькобежец – груз» внешние силы не действуют, поэтому можно воспользоваться формулой  (4.18*):
(4.18*):  , где
, где  - проекция импульса данной системы до броска, а
- проекция импульса данной системы до броска, а  - после броска. Учитывая, что проекция импульса системы равна сумме проекций импульсов ее частей и до броска оба тела покоились (суммарный импульс системы равен нулю), получаем скалярное равенство:
- после броска. Учитывая, что проекция импульса системы равна сумме проекций импульсов ее частей и до броска оба тела покоились (суммарный импульс системы равен нулю), получаем скалярное равенство:  , отсюда выражаем:
, отсюда выражаем:  . Вычисляем:
. Вычисляем:  (м/с). Знак «–» означает (исходя из определения проекции вектора на ось), что скорость конькобежца после броска направлена противоположно выбранному положительному направлению оси, т.е. груз и человек будут двигаться по горизонтали в противоположных направлениях.
(м/с). Знак «–» означает (исходя из определения проекции вектора на ось), что скорость конькобежца после броска направлена противоположно выбранному положительному направлению оси, т.е. груз и человек будут двигаться по горизонтали в противоположных направлениях.
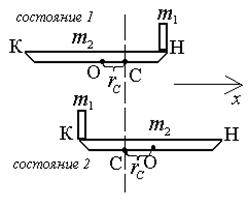

 Решение: В данной задаче имеем дело уже не с одним телом, а с системой двух тел «лодка-человек». Т.к. в направлении оси х на систему не действуют внешние силы, то при переходе системы из состояния 1 в состояние 2 ее импульс не меняется, т.е. остается равен нулю. Тогда получаем, что скорость центра масс системы тоже остается равна нулю в течение всего перехода, т.е. точка С (рис.) неподвижна в процессе перехода человека с носа лодки на корму.
Решение: В данной задаче имеем дело уже не с одним телом, а с системой двух тел «лодка-человек». Т.к. в направлении оси х на систему не действуют внешние силы, то при переходе системы из состояния 1 в состояние 2 ее импульс не меняется, т.е. остается равен нулю. Тогда получаем, что скорость центра масс системы тоже остается равна нулю в течение всего перехода, т.е. точка С (рис.) неподвижна в процессе перехода человека с носа лодки на корму. . Из рисунка видно, что лодка при этом должна сместиться на расстояние
. Из рисунка видно, что лодка при этом должна сместиться на расстояние  .
. (м). Ответ: 1 м ¨
(м). Ответ: 1 м ¨ 
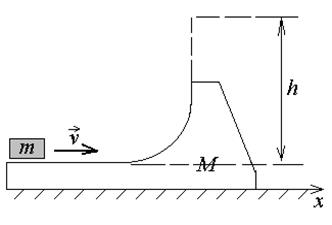
 Решение: Когда шайба m начинает менять направление движения, двигаясь по изгибу тела М, то тело М вследствие отсутствия силы трения начинает двигаться тоже. Считая, что время такого взаимодействия мало, можно воспользоваться законом сохранения проекции импульса системы «M-m» на горизонтальную ось х:
Решение: Когда шайба m начинает менять направление движения, двигаясь по изгибу тела М, то тело М вследствие отсутствия силы трения начинает двигаться тоже. Считая, что время такого взаимодействия мало, можно воспользоваться законом сохранения проекции импульса системы «M-m» на горизонтальную ось х:  (I).
(I).