|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ ПО ВЫПОЛНЯЕМЫМСтр 1 из 5Следующая ⇒
Лабораторные работы по дисциплине «Теория колебаний и волн» с применением редактора Multisim и пакета Mathcad
Разработал: Доцент каф. РТ и ИТ Федоров В.Н.
Якутск 2014 СОДЕРЖАНИЕ ВВЕДЕНИЕ ……………………………………………………………………...………....5 1 ОБЗОР ВИРТУАЛЬНЫХ ЛАБОРАТОРИЙ …………………………….………...…6 1.1 STAR……………………………………………………………………….………...…..7 1.2 EWB………………………………………………………………………….………......7 1.3 Simulink………...………………………………………………………………………..8 1.4 Краткие сведения о пакетах Multisim и Mathcad……………………..………………9 1.4.1 Multisim………………………………………………………………………………..9 1.4.2 Mathcad……………………………………………………………………………….20 ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ ПО ВЫПОЛНЯЕМЫМ ЛАБОРАТОРНЫМ РАБОТАМ ……………..………………………………………....24 2.1 Гармонические осцилляторы……………………...…………..…………………..….24 2.2 Сложение гармонических колебаний…………………..……………...…………......27 2.3 Ангармонические осцилляторы…………………………………………………...….30 2.4 Параметрические колебания……………...……………………………………...…...32 2.5 Нелинейные волны……………….......…………………………………….……….....34 2.6 Хаотические колебания……………………………………………………………….36 3 ЭКСПЕРИМЕНТАЛЬНАЯ ЧАСТЬ ………………………………..…….………….40 3.1 Гармонические осцилляторы……………………………………………………...….40 3.1.1 Лабораторная работа «Исследование гармонических колебаний»…………..…..40 3.1.2 Лабораторная работа «Исследование затухающих гармонических колебаний»……………………………….………………………………44 3.1.3 Лабораторная работа «Исследование частотных свойств резонансных контуров».......................................................................................................47 3.2 Сложение гармонических колебаний……………………….……………………..…49 3.2.1 Лабораторная работа «Сложение однонаправленных колебаний»…………..…..49 3.2.2 Лабораторная работа «Сложение перпендикулярных колебаний»…………..…..50 3.3 Ангармонические осцилляторы………………………………………………………51 3.3.1 Лабораторная работа «Осциллятор Дуффинга»..........................……………….…51 3.3.2 Лабораторная работа «Осциллятор Ван-дер-Поля»……………………………....53 3.4 Параметрические колебания………………………………………………………….58 3.4.1 Лабораторная работа «Исследование параметрического усилителя»……..…….58 3.5 Нелинейные волны..………………………………………………………………..….60 3.5.1 Лабораторная работа «Солитоны»…………………………………..……………..60 3.6 Хаотические колебания……………………………………………………………….61 3.6.1 Лабораторная работа «Осциллятор Лоренца»…………………………..…………61 3.6.2 Лабораторная работа «Генератор шума»………………………..…………………62 ЗАКЛЮЧЕНИЕ …………………………………………………...…………………..….64 ЛИТЕРАТУРА ……………………………………………………………………………66
ОПРЕДЕЛЕНИЯ, ОБОЗНАЧЕНИЯ И СОКРАЩЕНИЯ
В настоящей дипломной работе используются следующие определения, обозначения и сокращения: STAR - Software Tools for Academics and Researchers EWB - Electronics Workbench SPICE - Simulation Program with Integrated Circuit Emphasis ANSI - American National Standards Institute DIN - Deutsches Institut fü r Normung АЧХ – амплитудно-частотная характеристика ФЧХ – фазо-частотная характеристика ЛР – лабораторная работа ПК – персональный компьютер
ВВЕДЕНИЕ
В современном образовательном процессе всё большую роль играют виртуальные лаборатории. Виртуальная лаборатория – это программно-аппаратный комплекс, позволяющий проводить опыты без непосредственного контакта с реальной установкой или при полном отсутствии таковой. Актуальность использования виртуальных лабораторных работ состоит в том, что для организации и проведения таких работ не нужно сложного оборудования. Достаточно всего лишь места, где есть компьютер. Возможность моделирования объектов, процессов, явлений, которые невозможно воспроизвести в условиях учебного заведения, или наблюдать в реальности. Представляют собой обучающие системы, моделирующие поведение объектов реального мира в компьютере. Это набор программных продуктов, таких как STAR, Electronics Workbench, Simulink, MultiSim, Mathcad и другие. В данной дипломной работе использованы редактор схем Multisim и пакет Mathcad. Multisim – это уникальная возможность разработки схем и ее тестирования/эмуляции. Mathcad является интегрированной системой программирования, ориентированной на проведение математических, инженерно-технических расчётов. В работе сделан обзор виртуальных лабораторий. Приведены краткие описания использования редактора Multisim и пакета Mathcad, теоретические сведения по выполняемым лабораторным работам. Разработаны лабораторные работы: «Исследование частотных свойств резонансных контуров», «Сложение однонаправленных колебаний», «Сложение перпендикулярных колебаний», «Исследование параметрического усилителя», «Солитоны», «Генератор шума».
ГЛАВА 1 ОБЗОР ВИРТУАЛЬНЫХ ЛАБОРАТОРИЙ Виртуальная лаборатория – это программно-аппаратный комплекс, позволяющий проводить опыты без непосредственного контакта с реальной установкой или при полном отсутствии таковой [1]. Под виртуальными лабораториями понимается два типа программно-аппаратных комплексов: 1) дистанционные лаборатории – комплекс лабораторной установки с удаленным доступом; 2) виртуальные лаборатории - программное обеспечение, позволяющее моделировать лабораторные опыты. Могут применяться для: 1) ознакомления с техникой выполнения экспериментов; 2) ознакомления с оборудованием, с которым придется работать; 3) для освоения навыков наблюдений, составления отчетов. Такие комплексы обеспечивают максимальную наглядность, точность соответствия модели реального оборудования для проведения экспериментов. Это существенно облегчает работу, экономит время, создает эффект узнавания уже изученного оборудования. Преимущества виртуальных лабораторных работ [2]: 1) интерактивность; 2) независимость от конкретной лаборатории (возможность проведения в местах, где есть компьютер); 3) возможность моделирования объектов, процессов, явлений, которые невозможно воспроизвести в условиях учебного заведения, или наблюдать в реальности; 4) возможность выполнять задания удаленно, используя интернет. Недостатки использования виртуальных работ: 1) невозможность реальных исследований; 2) отсутствие предметной наглядности; 3) отсутствие практических навыков работы с конкретным оборудованием.
STAR STAR (Software Tools for Academics and Researchers) – программа Массачусетского технологического института (MIT) по разработке виртуальных лабораторий для исследований и обучения [1]. Деятельность программы заключается в разработке обучающих и исследовательских приложений по общей биологии, биохимии, генетике, гидрологии, в области распределенных вычислений. Большинство приложений реализованы в java либо html. Такие виртуальные лаборатории как, StarBiochem, StarGenetics, StarORF, StarMolSim, StarBiogene, StarHydro, StarCluster. Недостатком является то, что эта программа охватывает широкий круг задач только по биохимии, генетики и биологии. Но, несмотря на это STAR отличается фундаментальностью и богатым инструментарием.
EWB EWB (Electronics Workbench) – это система схемотехнического моделирования. Предназначена для моделирования и анализа электрических схем [3]. Программа EWB позволяет моделировать аналоговые, цифровые, цифро-аналоговые схемы большой степени сложности. Имеющиеся в программе библиотеки включают в себя большой набор широко распространенных электронных компонентов. Есть возможность подключения и создания новых библиотек компонентов. Параметры компонентов можно изменять в широком диапазоне значений. Широкий набор приборов позволяет производить измерения различных величин, задавать входные воздействия, строить графики. Все приборы изображаются в виде, максимально приближенном к реальному, поэтому работать с ними просто и удобно. Результаты моделирования можно вывести на принтер или импортировать в текстовый или графический редактор для их дальнейшей обработки. Программа Electronics Workbench совместима с программой P-SPICE, то есть предоставляет возможность экспорта и импорта схем и результатов измерений в различные её версии. Недостаток – разработка и поддержка данной программы уже не осуществляется [4]. Последним добавлением является EWB Layout, специализированная на разработке печатных плат и расширяющая возможности Electronics Workbench Simulink Программа Simulink является приложением к пакету MATLAB [5]. Реализует принцип визуального программирования, в соответствии с которым, пользователь на экране из библиотеки стандартных блоков создает модель устройства и осуществляет расчеты. Библиотека блоков Simulink насчитывает свыше 100 линейных, нелинейных, логических и другого вида блоков. При моделировании пользователь может выбирать метод решения дифференциальных уравнений, а также способ изменения модельного времени (с фиксированным или переменным шагом). В ходе моделирования имеется возможность следить за процессами, происходящими в системе. Для этого используются специальные устройства наблюдения, входящие в состав библиотеки Simulink. Результаты моделирования могут быть представлены в виде графиков или таблиц. Одним из главных достоинств Simulink является возможность включения соединения нескольких блоков (группы блоков) в один составной блок (подсистему) [6]. Эта операция позволяет упростить построение и редактирование сложных блок-схем, так как уменьшает число элементов в модельном окне. При этом создается иерархическая блок-схема, в которой верхний уровень блоков, другими словами, составные блоки (подсистемы) верхнего уровня отражают связь главных компонентов блок-схемы, а остающиеся нижние уровни составных блоков описывают логику каждого компонента. Проверка результатов осуществляется в режиме реального времени [7]. Возможность задания в блоках любых математических выражений позволяет решать как типовые задачи, так и пробовать новые решения и находить наиболее эффективные компромиссы. Пакет содержит обширную библиотеку компонентов блок-схемы, а также удобный редактор компонентов. К недостаткам относятся приближенные характеристики некоторых компонентов блок-схемы.
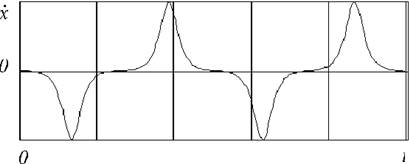
Multisim Multisim – это уникальная возможность разработки схем и ее тестирования/эмуляции из одной среды разработки [8]. У такого подхода есть множество преимуществ. Новичкам в Multisim не нужно беспокоиться о сложном синтаксисе SPICE (Simulation Program with Integrated Circuit Emphasis – программа эмуляции со встроенным обработчиком схем) и его командах, а у продвинутых пользователей есть возможность настройки всех параметров SPICE. Благодаря Multisim описание схемы стало как никогда простым и интуитивно понятным. Представление в виде электронной таблицы позволяет одновременно изменять характеристики любого количества элементов: от схемы печатной платы до модели SPICE. Безрежимное редактирование – это наиболее эффективный способ размещения и соединения компонентов. Работать с аналоговыми и цифровыми составными элементами интуитивно просто и понятно. Кроме традиционного анализа SPICE, Multisim позволяет пользователям подключать к схеме виртуальные приборы. Концепция виртуальных инструментов – это простой и быстрый способ увидеть результат с помощью имитации реальных событий. Также в Multisim есть специальные компоненты под названием «интерактивные элементы» (interactive parts), вы можете изменять их во время эмуляции. К интерактивным элементам относятся переключатели, потенциометры, малейшие изменения элемента сразу отражаются в имитации. При необходимости более сложного анализа Multisim предлагает более 15 различных функций анализа. Некоторые примеры включают использование переменного тока, анализ наиболее неблагоприятных условий и Фурье. В Multisim входит Grapher – мощное средство просмотра и анализа данных эмуляции. Функции описания и тестирования схемы, представленные в Multisim помогут любому разработчику схем, сэкономят его время и спасут от ошибок на всем пути разработки схемы. Интерфейс пользователя состоит из нескольких основных элементов, которые представлены на рисунке 1.1.
Рис. 1.1 – Пользовательский интерфейс
В окне разработки находятся средства управления различными элементами схемы. Закладка Доступность (Visibility) позволяет скрыть или отобразить слои схемы рабочей области. Закладка Иерархия (Hierarchy) отображает взаимосвязь между файлами открытого проекта в виде древовидной структуры. Закладка Проект (Project) содержит информацию об открытом проекте. Пользователь может добавить файлы в папки открытого проекта, изменить доступ к файлам и создать архив проекта. Глобальные настройки управляют свойствами среды Multisim. Доступ к ним открывается из диалогового окна «Свойства» (Preferences). Выберите пункт Опции/глобальные настройки (Options/Global Preferences), откроется окно «Свойства» со следующими закладками: - Paths (Путь) – здесь можно указать путь к файлам баз данных и другие настройки; - Save (Сохранить) – здесь можно настроить период автоматического сохранения и нужно ли записывать данные эмуляции вместе с прибором; - Parts (Компоненты) – здесь можно выбрать режим размещения компонентов и стандарт символов (ANSI или DIN), также находятся настройки эмуляции по умолчанию; - General (Общие) – здесь можно изменить поведение прямоугольника выбора, колеса мыши и инструментов соединения и автоматического соединения (рис. 1.2).
Рис. 1.2 – Закладка General глобальных настроек Диалоговое окно настройки свойств листа (Sheet Properties) используется для изменения свойств каждого листа. Эти свойства сохраняются с файлом схемы, поэтому если проект открывается на другом компьютере, настройки не изменяются. Настройки листа сгруппированы в следующие закладки: - Circuit (Схема) – здесь можно выбрать цветовую схему и внешний вид текста рабочей области (рис. 1.3); - Workspace (Рабочая область) – здесь можно настроить размер листа и его свойства; - Wiring (Соединение) – здесь находятся настройки соединений и шины; - Font (Шрифт) – здесь можно выбрать шрифт, его размер и начертание для текстовых элементов схемы; - PCB (Печатная плата) – здесь находятся настройки печатной платы; - Visibility (Доступность) – здесь можно скрыть или отобразить дополнительные слои комментариев.
Рис. 1.3 Закладка Circuit настройки свойств листа
Пользовательский интерфейс Multisim можно настроить на свой вкус, изменения зависят друг от друга. Панели инструментов можно закрепить в любом месте и изменить их форму. Инструменты всех панелей также можно изменять и создавать новые панели. Система меню также полностью настраивается, вплоть до контекстных меню разных объектов. Горячие клавиши клавиатуры тоже можно настроить. Любой команде меню или панели инструментов можно назначить свою клавишу. Для настройки пользовательского интерфейса выберите пункт Опции/Настроить пользовательский интерфейс (Options/Customize User Interface). С помощью диалогового окна «Настройка» (Customize) вы можете создавать и изменять панели инструментов, назначать горячие клавиши, настраивать и создавать новые меню, а также изменять стиль пользовательского интерфейса (рис. 1.4).
Рис. 1.4 – Диалоговое окно «Настройка»
Компоненты – это основа любой схемы, это все элементы, из которых она состоит. Multisim оперирует с двумя категориями компонентов: реальными (real) и виртуальными (virtual). У реальных компонентов, в отличие от виртуальных есть определенное, неизменяемое значение и свое соответствие на печатной плате (рис. 1.5а). Виртуальные компоненты нужны только для эмуляции, пользователь может назначить им произвольные параметры. Например, сопротивление виртуального резистора может быть произвольным, даже 3, 86654 Ома. Виртуальные компоненты помогают разработчикам при проверке с помощью схем с известными значениями компонентов. Виртуальные компоненты также могут не соответствовать реальным, например, как 4-х контактный элемент отображения 16-тиричных цифр, показанный на рисунке 1.5б. В Multisim есть и другая классификация компонентов: аналоговые, цифровые, смешанные, анимированные, интерактивные, цифровые с мультивыбором, электромеханические и радиочастотные.
а) б) Рис. 1.5 –а) Реальные компоненты: микроконтроллер, U2A – логический элементы НЕ-И, Q1 – транзистор; б) Виртуальные компоненты: U1 -7-сегментный дисплей, D1 –диод, V1 – источник переменного напряжения;
Некоторые элементы схемы Multisim могут реагировать на действия пользователя. Изменение этих элементов сразу отражается на результатах эмулирования. Компоненты управляются с помощью клавиш, указанных под каждым элементом. Например, на рисунке 1.6 приведен потенциометр. Клавиша А увеличит сопротивление потенциометра до 100% от указанной величины (1 Ком). Чтобы уменьшить сопротивление, прижмите Shift и нажмите А.
Рис. 1.6 - Потенциометр
Пробел открывает или закрывает выключатель на рисунке 1.7.
Рис. 1.7 – Выключатель SPST
Горячую клавишу можно выбрать следующим образом: при двойном щелчке мыши откроется окно, в выпадающем меню которого можно выбрать нужную клавишу. Пример информации о компонентах приведен на рисунке 1.8.
Рис. 1.8 – Информация о компонентах
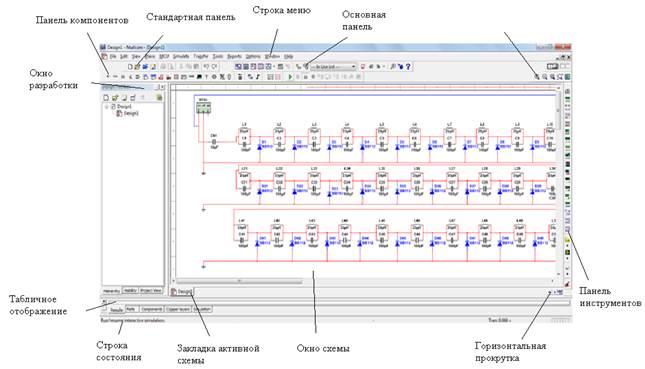
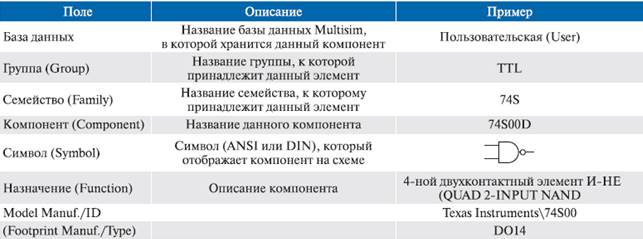
В проводнике компонентов отображаются следующие поля (рис. 1.9):
Рис. 1.9 – Вкладка Элементы (Parts) или панель инструментов «Компоненты» (Component)
Проводник компонентов (Component Browser) – это место, где вы выбираете компоненты, чтобы разместить их на схеме (рис. 1.10).
Рис. 1.10 – Проводник компонентов Горячая клавиша по умолчанию для размещения компонента – Ctrl-W или двойной щелчок мышью. Курсор мыши примет форму компонента, пока вы не выберите место на схеме для компонента. Для поиска просто начните набирать название компонента, и проводник автоматически подберет подходящие элементы. Кнопка Поиск (Search) открывает расширенный поиск. В проводнике компонентов отображается текущая база данных, в которой хранятся отображаемые элементы. В Multisim они организованы в группы (groups) и семейства (families). Также в проводнике отображается описание компонента (поле Назначение Function), модель и печатная плата или производитель. Символ звездочки («*») заменяет любой набор символов. Например, среди результатов запроса «LM*AD» будут «LM101AD» и «LM108AD». В Multisim есть базы данных трех уровней: - из главной базы данных (Master Database) можно только считывать информацию, в ней находятся компоненты Electronics Workbench (рис. 1.11);
Рис. 1.11 – Проводник баз данных Master Database - пользовательская база данных (User Database) соответствует текущему пользователю компьютера, предназначена для хранения компонентов, которые нежелательно предоставлять в общий доступ; - корпоративная база данных (Corporate Database) предназначена для тех, компонентов, которые должны быть доступны другим пользователям по сети. Средства управления базами данных позволяют перемещать компоненты, объединять две базы в одну и редактировать их. Все базы данных разделяются на группы, а они, в свою очередь, на семейства. Когда пользователь выбирает компонент и помещает его в схему, создается новая копия. Все изменения с ней никак не затрагивают информацию, хранящуюся в базе данных. Если изменить компонент в базе данных, то уже существующие копии компонентов останутся такими же, как и были. Изменения затронут новые компоненты этого типа. При сохранении схемы вся информация о компонентах хранится в файле Multisim. При загрузке пользователь может оставить загруженные элементы в том виде, как они есть или обновить компоненты данными из базы с аналогичными именами. В то время как хорошая конструкция – следствие хорошей схемы, по настоящему отличные конструкции получаются, только если у вас есть возможность их эмулировать. В Multisim есть множество функций и средств эмуляции, недоступных в других пакетах проектирования электроники. В Multisim встроен не только эмулятор мирового уровня SPICE, но и XSPICE, предназначенный для эффективного эмулирования цифровых компонентов. Патентованные средства соэмуляции позволяют тестировать схемы с компонентами, описанными на VHDL. Пакет MultiMCU позволяет включать в эмуляцию смешанной схемы определенные микроконтроллеры. Виртуальные приборы – это модельные компоненты Multisim, которые соответствуют реальным приборам. Например, среди виртуальных приборов в Multisim есть осциллографы, генераторы сигналов, сетевые анализаторы и плоттеры боде (рис. 1.12).
Рис. 1.12 – Панель приборов
Виртуальные приборы LabVIEW могут регистрировать реальные данные, пользоваться ими во время эмуляции, отправлять данные на вывод аналоговых приборов. Таким образом, эмулированные данные могут управлять реальными приборами. Для создания виртуальных приборов среда разработки LabVIEW необходима, а для использования уже созданных – нет. В Multisim также есть эмулированные реально существующие приборы. К таким приборам относится Textronics TDS 2024 Oscilloscope.
Mathcad Mathcad является интегрированной системой программирования, ориентированной на проведение математических, инженерно-технических расчетов. Достаточно просто вводить математические выражения с помощью встроенного редактора формул, причем в виде, максимально приближенном к общепринятому, и тут же получать результат [9]. В Mathcad интерфейс пользователя интуитивен и сходен с другими приложениями Windows (рис. 1.13).
Рис. 1.13 – Окно Mathcad
Его составные части: - верхнее меню, или строка меню (menu bar); -панели инструментов (toolbars) Standart (Стандартная) и Formatting (Форматирование); - панель инструментов Math (Математика) и доступные через нее дополнительные математические панели инструментов; - рабочая область (worksheet); - строка состояния (status line, или status bar); - всплывающие, или контекстные, меню (pop-up menus, или context menus); -диалоговые окна, или диалоги (dialogs). Строка меню располагается в самой верхней части окна Mathcad. Она содержит девять заголовков, щелчок мышью на каждом из которых приводит к появлению соответствующего меню с перечнем сгруппированных по действию команд: - File (Файл) – команды, связанные с созданием, открытием, сохранением, пересылкой по электронной почте и распечаткой на принтере файлов с документами; - Edit (Правка) – команды, относящиеся к правке текста (копирование, вставка, удаление фрагментов и т.п.); - View (Вид) – команды, управляющие внешним видом документа в окне редактора Mathcad, а также команды, создающие файлы анимации; - Insert (Вставка) – команды вставки различных объектов в документы; - Format (Формат) – команды форматирования текста, формул и графиков; - Math (Математика) – команды управления вычислительным процессом; - Symbolics (Символика) – команды символьных вычислений; - Window (Окно) – команды управления расположением окон с различными документами на экране; - Help (Справка) – команды вызова контекстно-зависимой справочной информации, доступа к центру ресурсов, опции совета дня и сведений о версии программы. Панели инструментов служат для быстрого (в один щелчок мыши) выполнения наиболее часто применяемых команд. Все действия, которые можно выполнить с помощью панелей инструментов, доступны и через верхнее меню. На рисунке 1.14 изображено окно Mathcad с тремя основными панелями инструментов, расположенными непосредственно под строкой меню.
Рис. 1.14 – Окно Mathcad с основными панелями инструментов
Кнопки в панелях сгруппированы по сходному действию команд: 1. Standart (Стандартная) – служит для выполнения большинства операций, таких как действия с файлами, редакторская правка, вставка объектов и доступ к справочным системам; 2. Formatting (Форматирование) – для форматирования (изменения типа и размера шрифта, выравнивания и т.п.) текста и формул; 3. Math (Математика) – для вставки математических символов и операторов в документы. Группы кнопок на панелях инструментов разграничены по смыслу вертикальными линиями – разделителями. При наведении указателя мыши на любую из кнопок рядом с кнопкой появляется всплывающая подсказка – короткий текст, поясняющий назначение кнопки. Наряду со всплывающей подсказкой, более развернутое объяснение готовящейся операции можно отыскать на строке состояния. Панель Math (Математика) предназначена для вызова на экран еще девяти панелей (рис. 1.15), с помощью которых, собственно, и происходит вставка математических операций в документы.
Рис. 1.15 – Математические панели инструментов
Чтобы показать какую-либо из них, нужно нажать соответствующую кнопку на панели Math. Перечислим назначение математических панелей: - Calculator (Калькулятор) – служит для вставки основных математических операций, получила свое название из-за схожести набора кнопок с кнопками типичного калькулятора; - Graph (График) – для вставки графиков; - Matrix (Матрица) – для вставки матриц и матричных операторов; - Evaluation (Выражения) – для вставки операторов управления вычислениями; - Calculus (Вычисления) – для вставки операторов интегрирования, дифференцирования, суммирования; - Boolean (Булевы операторы) – для вставки логических (булевых) операторов; - Programming (Программирование) – для программирования средствами Mathcad; - Greek (Греческие символы) – для вставки греческих символов; - Symbolic (Символика) – для вставки символьных операторов.
Гармонические осцилляторы Гармонический осциллятор – это система, уравнение движения которой описывается дифференциальным уравнением:
где
Колебания гармонического осциллятора есть важный пример периодического движения [10]. В качестве примеров гармонического осциллятора могут быть пружинный, физический и математический маятники, колебательный контур (для малых токов и напряжений). 1. Пружинный маятник - это груз массой m, который подвешен на абсолютно упругой пружине и совершает гармонические колебания под действием упругой силы:
где Уравнение движения маятника имеет вид:
Из формулы (2.1) вытекает, что пружинный маятник совершает гармонические колебания по закону:
с циклической частотой:
и периодом:
Формула (2.6) верна для упругих колебаний в границах, в которых выполняется закон Гука, т.е. если масса пружины мала по сравнению с массой тела. Потенциальная энергия пружинного маятника, используя (2.5) и формулу потенциальной энергии, равна:
2. Физический маятник - это твердое тело, которое совершает колебания под действием силы тяжести вокруг неподвижной горизонтальной оси, которая проходит через точку О, не совпадающую с центром масс С тела (рис. 2.1).
Рис. 2.1 – Физический маятник
Если маятник из положения равновесия отклонили на некоторый угол α, то, используя уравнение динамики вращательного движения твердого тела, момент M возвращающей силы:
где
Уравнение (2.8) запишем как:
Принимая
получим уравнение:
идентичное с (2.1), решение, которого (2.1) найдем и запишем как:
Из формулы (2.12) вытекает, что при малых колебаниях физический маятник совершает гармонические колебания с циклической частотой
где введена величина Точка О' на продолжении прямой ОС, которая отстоит от точки О подвеса маятника на расстоянии приведенной длины L, называется центром качаний физического маятника (рис. 2.1). Применяя теорему Штейнера для момента инерции оси, найдем:
т. е. ОО' всегда больше ОС. Точка подвеса О маятника и центр качаний О' имеют свойство взаимозаменяемости: если точку подвеса перенести в центр качаний, то прежняя точка О подвеса будет новым центром качаний, и при этом не изменится период колебаний физического маятника. 3. Математический маятник - это идеализированная система, состоящая из материальной точки массой m, которая подвешена на нерастяжимой невесомой нити, и которая колеблется под действием силы тяжести. Хорошее приближение математического маятника есть небольшой тяжелый шарик, который подвешен на длинной тонкой нити. Момент инерции математического маятника:
где Поскольку математический маятник есть частный случай физического маятника, если предположить, что вся его масса сосредоточена в одной точке - центре масс, то, подставив (2.15) в (2.13), найдем выражение для периода малых колебаний математического маятника:
Сопоставляя формулы (2.13) и (2.16), видим, что если приведенная длина L физического маятника равна длине
Ангармонический осциллятор Уравнение колебаний физического маятника имеет вид [14]:
где
Разложение
При малых углах отклонения (
Полученное уравнение может быть решено методами теории возмущений в виде:
Если углы отклонения
Решением возмущенного уравнения является суперпозиция колебаний с частотами В случае не очень больших колебаний период колебаний равен:
Для произвольных углов:
где
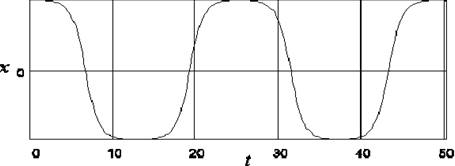
- полный эллиптический интеграл первого рода. Уравнение (2.30) описывает ангармонический осциллятор. Его решение можно представить в виде суперпозиции нескольких гармонических решений. Результаты решения уравнения (2.30) представлены на рис. 2.4 (зависимость Рис.2.4 – Зависимость
Рис.2.5 – Зависимость
Любопытно поведение ангармонического осциллятора под действием внешней гармонической силы. Наличие в решении высших гармоник приводит к тому, что резонанс может наступить на различных частотах, кратных собственной частоте гармонического осциллятора. Неизохронность колебаний, то есть зависимость периода (частоты колебаний) от амплитуды приводит к тому, что при резонансе собственная частота осциллятора меняется, и он выходит из резонанса.
Параметрические колебания Параметрическими колебаниями называются колебания, при которых происходит периодическое изменение какого-либо параметра колеблющейся системы. Если изменение параметра системы к увеличению амплитуды колебаний, то такой процесс называют параметрическим резонансом [15]. Популярное:
|
Последнее изменение этой страницы: 2017-03-09; Просмотров: 882; Нарушение авторского права страницы














 , (2.1)
, (2.1) - величина, совершающая колебания;
- величина, совершающая колебания;  – циклическая частота.
– циклическая частота. , (2.2)
, (2.2) - жесткость пружины.
- жесткость пружины. . (2.3)
. (2.3) , (2.4)
, (2.4) , (2.5)
, (2.5) . (2.6)
. (2.6) . (2.7)
. (2.7)
 , (2.8)
, (2.8) - момент инерции маятника относительно оси, которая проходит через точку подвеса О;
- момент инерции маятника относительно оси, которая проходит через точку подвеса О;  - расстояние между осью и центром масс маятника;
- расстояние между осью и центром масс маятника;  – возвращающая сила (знак минус указывает на то, что направления
– возвращающая сила (знак минус указывает на то, что направления  и
и  всегда противоположны;
всегда противоположны;  поскольку колебания маятника считаются малыми, т.е. маятник из положения равновесия отклоняется на малые углы).
поскольку колебания маятника считаются малыми, т.е. маятник из положения равновесия отклоняется на малые углы). . (2.9)
. (2.9) , (2.10)
, (2.10) , (2.11)
, (2.11) . (2.12)
. (2.12) и периодом:
и периодом:  , (2.13)
, (2.13) - приведенная длина физического маятника.
- приведенная длина физического маятника. , (2.14)
, (2.14) , (2.15)
, (2.15) . (2.16)
. (2.16) , (2.30)
, (2.30) ;
;  – масса маятника;
– масса маятника;  – ускорение свободного падения;
– ускорение свободного падения;  – угол отклонения из положения равновесия.
– угол отклонения из положения равновесия. в ряд Тейлора:
в ряд Тейлора:  (2.31)
(2.31) )
)  и уравнение (2.30) переходит в уравнение гармонического осциллятора (2.1). Для уточнения решения можно учесть следующий член в разложении (2.31), тогда:
и уравнение (2.30) переходит в уравнение гармонического осциллятора (2.1). Для уточнения решения можно учесть следующий член в разложении (2.31), тогда:  . (2.32)
. (2.32) . (2.33)
. (2.33) . (2.34)
. (2.34) . Решение уравнения (2.30) будет содержать набор высших гармоник. Наличие в спектре колебаний с кратными частотами (гармоник) – наиболее важная характерная черта нелинейных колебаний.
. Решение уравнения (2.30) будет содержать набор высших гармоник. Наличие в спектре колебаний с кратными частотами (гармоник) – наиболее важная характерная черта нелинейных колебаний. . (2.35)
. (2.35) , (2.36)
, (2.36) , (2.37)
, (2.37) ) и на рис. 2.5 (зависимость
) и на рис. 2.5 (зависимость  ).
).