
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Электромагнитные моменты от высших пространственных гармоник магнитного поля асинхронного двигателя
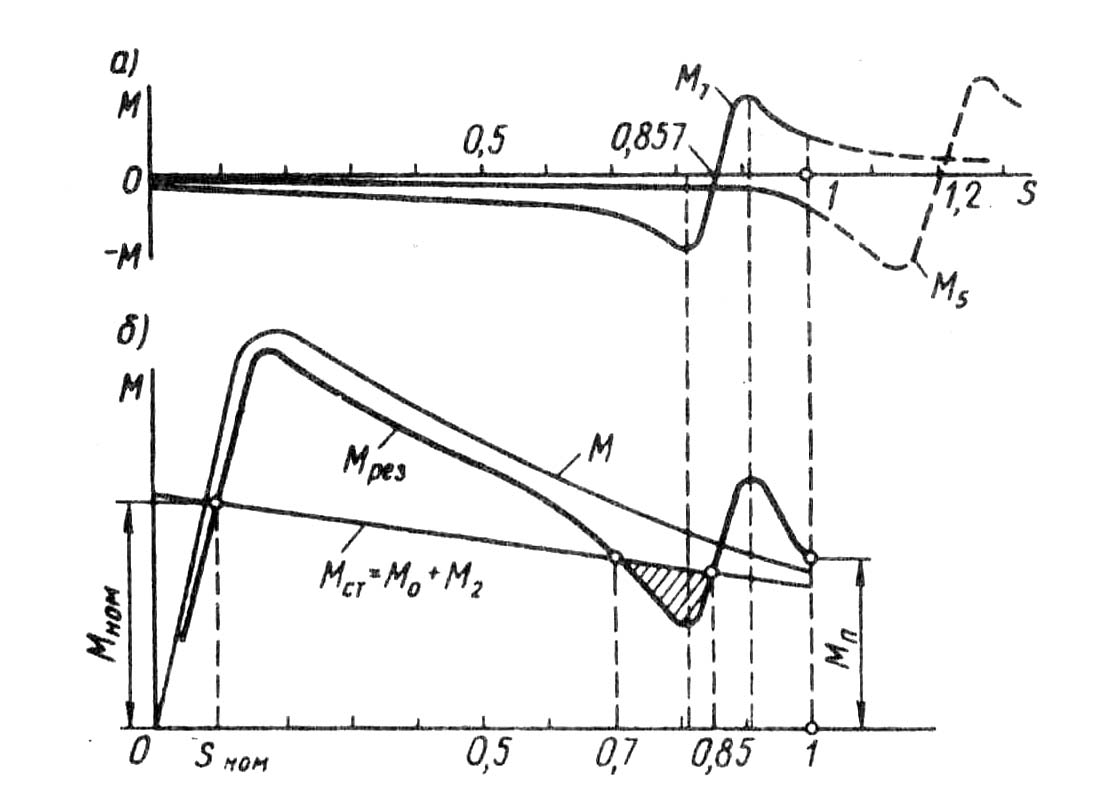
Ранее было установлено, что МДС трехфазной обмотки статора помимо основной гармоники содержит ряд высших пространственных гармоник (см. § 9.5). Каждая из этих гармоник создает в машине вращающееся магнитное поле, частота вращения которого в υ раз меньше частоты вращения поля основной гармоники [см. (9.18)]. При этом высшие пространственные гармоники МДС порядка υ = 6х + 1 создают прямовращающиеся (прямые) поля, а гармоники порядка υ = 6х - I — обратновращающиеся (обратные) поля. Асинхронные моменты.Магнитные поля от высших пространственных гармоник, сцепляясь с обмоткой ротора, наводят в ней ЭДС и создают в двигателе собственные электромагнитные асинхронные моменты. Эти моменты ухудшают свойства двигателя, поэтому их принято называть паразитными. При рассмотрении выражения электромагнитного момента и механической характеристики асинхронного двигателя (см. § 13.2) имелось в виду действие лишь магнитного поля основной гармоники. Если же учесть влияние высших пространственных гармоник поля, то кривая электромагнитного момента (см. рис. 13.3) окажется искаженной. В зависимости от направления и частоты вращения nυ магнитного поля высшей пространственной гармоники и направления создаваемого ею электромагнитного момента Mυ высшие пространственные гармоники поля могут создать в асинхронном двигателе три режима: двигательный режим, если поле высшей гармоники прямовращающееся и частота его вращения nυ > n2, а направление момента Mυ положительное, т. е. он направлен согласно с моментом основной гармоники М; генераторный режим, если поле высшей гармоники прямовращающееся и частота его вращения nυ < n2, а направление момента Mυ отрицательное, т. е. он направлен встречно моменту основной гармоники М; тормозной режим, если поле высшей гармоники обратновращающееся, a Mυ отрицательный, т. е. направлен встречно моменту основной гармоники М. На рис. 13.10, а представлены графики моментов асинхронного двигателя Mυ = f(s)от прямого поля седьмой гармоники и обратного поля пятой гармоники, где s - скольжение ротора относительно поля основной гармоники. Обратное поле пятой гармоники при s = 0 ÷ 1 создает отрицательный момент М5 (тормозной режим); прямое поле седьмой гармоники при 0, 857 < s < 1 создает положительный момент M7 (двигательный режим), а при s < 0, 857 — отрицательный момент М7 (генераторный режим). Сложив ординаты моментов М7 и М5 с ординатами момента основной гармоники М, получим кривую результирующего асинхронного момента (рис. 13.10, б): MРЕЗ = M + М5 + М7. (13.26) «Провал» кривой момента МРЕЗ, (участок при 0, 7 < s < 0, 85, на котором МРЕЗ < Мст) затрудняет процесс разгона двигателя и может вызвать «застревание» ротора на малой частоте вращения. Наибольшую опасность представляют собой паразитные асинхронные моменты при короткозамкнутой обмотке ротора, так как в этом случае токам, наведенным высшими гармониками магнитного поля в стержнях ротора, оказывается небольшое электрическое сопротивление. В двигателях с фазным ротором действие паразитных асинхронных моментов намного слабее. Заметное влияние на форму кривой электромагнитного момента оказывают асинхронные паразитные моменты от гармоник поля зубцового порядка (обусловленных наличием зубцов на статоре и роторе): vZ1 = (Z1/p) ± l; vZ2 = (Z2/p) ± l. (13.27)
Рис. 13.10. Асинхронные моменты от основной и высших (5-й и 7-й) гармоник поля
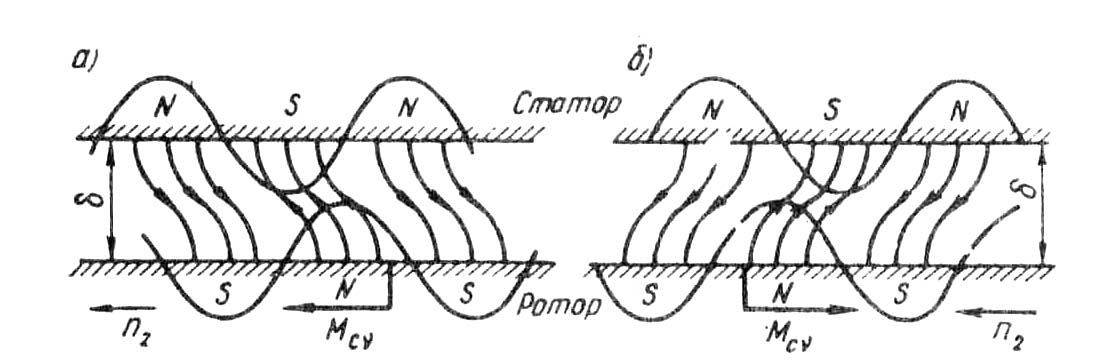
Рис. 13.11. Влияние взаимного расположения в пространстве полюсов высших пространственных гармоник поля статора и ротора на направление синхронного момента: а— синхронный момент положительный, б— синхронный момент отрицательный
Эффективное средство ослабления влияния высших гармоник на свойства двигателей — скос пазов ротора в пределах зубцового деления.В этом случае ЭДС в стержнях ротора от зубцовых гармоник поля статора снижаются почти до нуля. Действие высших гармоник поля ослабляют также правильным выбором числа пазов статора Z1 и ротора Z2.Рекомендуется соотношение Z2 ≤ l, 25 (Z1 ± p ). Синхронные моменты.Между вращающимися магнитными полями высших пространственных гармоник статора и ротора, имеющими одинаковый порядок, возникают силы магнитного взаимодействия. Результатом этого взаимодействия является возникновение синхронного момента Мcυ . В общем случае поля статора и ротора от высших пространственных гармоник вращаются с разными частотами (nυ 1 ≠ nυ 2), а поэтому направление синхронного момента Mcυ меняется в зависимости от взаимного расположения магнитных полюсов взаимодействующих полей. Обычно частота изменения знака момента Mcυ велика, и из-за большой инерции ротора этот момент не оказывает заметного влияния на вращение ротора. Но при некоторой частоте вращения ротора поля высших гармоник статора и ротора начинают вращаться с одинаковой частотой вращения (nυ 1 = nυ 2). В этом случае направление синхронного момента Mcυ становится стабильным. В зависимости от взаимного расположения магнитных полюсов магнитных полей момент Mcυ может быть положительным или отрицательным (рис. 13.11). Синхронные моменты в асинхронном двигателе нежелательны, т. е. являются паразитными, так как они могут вызвать провалы в механической характеристике двигателя. Наибольшего значения синхронные моменты достигают при наличии зубцовых гармоник поля статора и ротора одинакового порядка, т. е. при υ z1 = υ z2. Синхронные моменты наиболее опасны при следующих соотношениях пазов статора и ротора (Z1и Z2): Z1 = Z2; Z1 - Z2 = ±2p. (13.28) Особенно нежелательно равенство числа пазов на статоре и роторе (Z1 = Z2), так как это может привести к «прилипанию» ротора к статору: зубцы ротора силами магнитного тяжения удерживаются под зубцами статора. Уменьшению синхронных моментов способствует скос пазов на роторе. Контрольные вопросы 1.Какие виды потерь имеют место в асинхронном двигателе? 2.Почему магнитные потери в сердечнике ротора не учитывают? 3.На какие виды потерь влияют величина воздушного зазора и толщина пластин сердечника статора? 4.Используя данные примера 13.1 и задавшись значениями тока статора I1 = 0, 5, 0, 75, 1, 15 I1ном, определите соответствующие значения КПД и постройте график η = f(P2), при расчетах примите следующие значения коэффициента мощности: cos φ 1.0, 5 = 0, 4, cos φ 1.0, 75 = 0, 6; cos φ 1.1, 15 = 0, 8. 5.Почему график I1 = f(P2)не выходит из начала координат? 6.Почему при нагрузках двигателя меньше номинальной его cos φ 1, имеет низкие значения? 7.При каких условиях высшие пространственные гармоники поля создают и асинхронном двигателе двигательный, генераторный и тормозной режимы? 8. Какими причинами может быть вызван «провал» в механической характеристике? 9.При каких условиях может происходить «прилипание» ротора к статору? 10. Какими мерами можно ослабить паразитные моменты в двигателе?
ГЛАВА 14 • Опытное определение параметров и расчет рабочих характеристик асинхронных двигателей Основные понятия
Существует два метода получения данных для построения рабочих характеристик асинхронных двигателей: метод непосредственной нагрузки и косвенный метод. Метод непосредственной нагрузки заключается в опытном исследовании двигателя в диапазоне нагрузок от холостого хода до режима номинальной нагрузки с измерением необходимых параметров. Этот метод обычно применяется для двигателей мощностью не более 10—15 кВт. С ростом мощности двигателя усложняется задача его нагрузки, растут непроизводительный расход электроэнергии и загрузка электросети (исключение составляют установки, содержащие несколько электрических машин, включенных по схеме с частичным возвратом электроэнергии в сеть). Применение этого метода ограничивается еще и тем, что не всегда представляется возможным создать испытательную установку по причине отсутствия требуемого оборудования и недопустимости перегрузки электросети. Широкое применение получил более универсальный косвенный метод, применение которого не ограничивается мощностью двигателя. Этот метод заключается в выполнении двух экспериментов: опыта холостого хода и опыта короткого замыкания. Опыты х.х. и к.з. асинхронных двигателей в основном аналогичны таким же опытам трансформаторов (см. § 1.11). Но они имеют и некоторые особенности, обусловленные главным образом наличием у двигателя вращающейся части — ротора. Кроме того, при переходе из режима х.х. в режим к.з. параметры обмоток двигателя (активные и индуктивные сопротивления) не остаются неизменными, что объясняется зубчатой поверхностью статора и ротора. Все это создает некоторые затруднения в проведении опытов и в последующей обработке их результатов. Опыт холостого хода
Питание асинхронного двигателя при опыте х.х. осуществляется через индукционный регулятор напряжения ИР (рис. 14.1) или регулировочный автотрансформатор, позволяющие изменять напряжение в широких пределах. При этом вал двигателя должен быть свободным от механической нагрузки. Опыт начинают с повышенного напряжения питания U1 = 1, 15 Uном, затем постепенно понижают напряжение до 0, 4 Uном так, чтобы снять показания приборов в 5—7 точках. При этом один из замеров должен соответствовать номинальному напряжению U1ном. Измеряют линейные значения напряжений и токов и вычисляют их средние значения: Uср = (UАВ + UВС + UСА)/ 3 (14.1) I0ср = (IОА + IОВ + IOC)/ 3 (14.2) а затем в зависимости от схемы соединения обмотки статора определяют фазные значения напряжения и тока х.х.: при соединении в звезду U1 = Uср/ при соединении в треугольник U1 = Ucp; U0 = I0cp/
Рис. 14, 1. Схема включения трехфазного асинхронного двигателя при опытах х.х. и к.з.
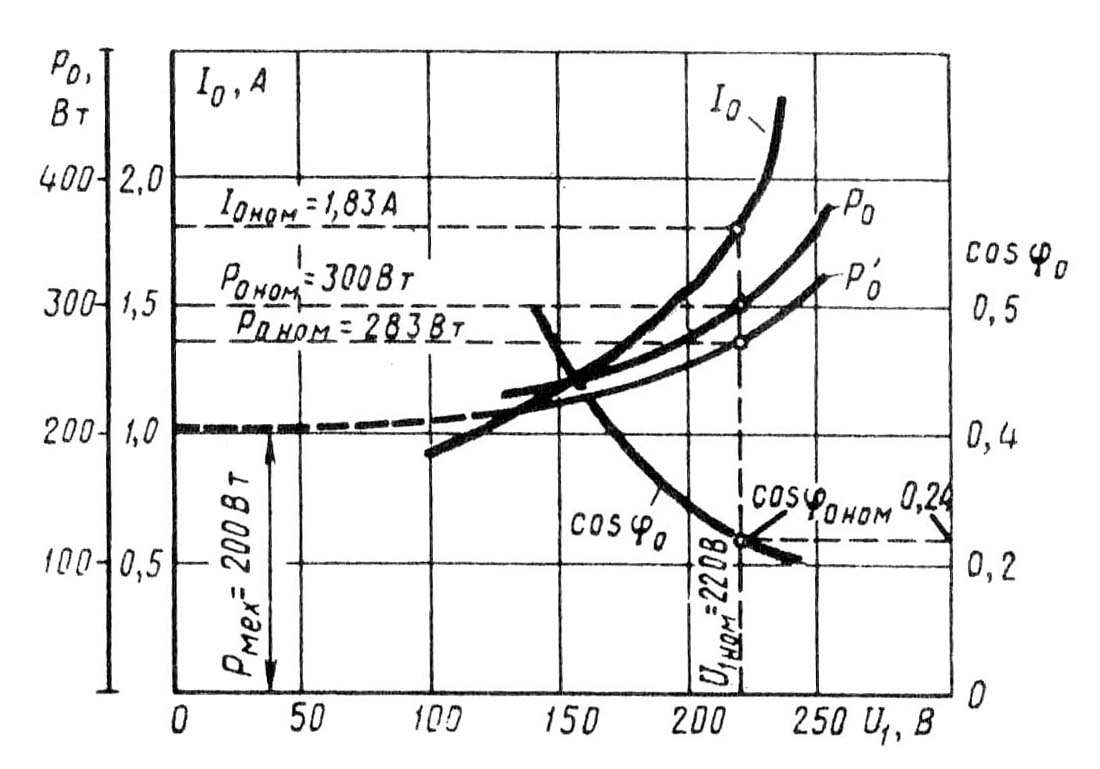
Ваттметр W измеряет активную мощность Р0, потребляемую двигателем в режиме х.х., которая включает в себя электрические потери в обмотке статора m1 I20 r1, магнитные потери в сердечнике статора Рми механические потери Рмех (Вт): Р0 = m1 I20 r1 + Рм + Рмех (14.5) Здесь r1 - активное сопротивление фазы обмотки статора (Ом), измеренное непосредственно после отключения двигателя от сети, чтобы обмотка не успела охладиться. Сумма магнитных и механических потерь двигателя (Вт) P/0 = Рм + Рмех = Р0 – m1 I20 r1 (14.6) Коэффициент мощности для режима х.х. cоs φ 0 = Р0/ (m1 U1 I0). (14.7) По результатам измерений и вычислений строят характеристики х.х. I0, P0, P/0и соs φ 0 = f(U1), на которых отмечают значения величин I0ном, Р0ном, Р/0ном и соs φ 0 соответствующих номинальному напряжению U1ном(рис. 14.2). Если график Р/0 =f(U1) продолжить до пересечения с осью ординат (U1 = 0), то получим величину потерь Рмех. Это разделение магнитных и механических потерь основано на том, что при неизменной частоте сети f1 частота вращения двигателя в режиме х.х. n0, а следовательно, и механические потери Рмех неизменны. В то же время магнитный поток Ф прямо пропорционален ЭДС статора Е1. Для режима х.х. U1 ≈ E1, а поэтому при U1 = 0 и магнитный поток Ф = 0, а следовательно, и магнитные потери Рм = 0. Определив величину механических потерь Рмех, можно вычислить магнитные потери (Вт): Рм = Р/0 – Рмех (14.8) Для асинхронных двигателей с фазным ротором в опыте холостого хода определяют
Рис. 14.2. Характеристики х.х. трехфазного асинхронного двигателя (3, 0 кВт, 220/380 В, 1430 об/мин)
коэффициент трансформации напряжений между обмотками статора и ротора. Этот коэффициент с достаточной точностью может быть определен по отношению средних арифметических линейных (междуфазовых) напряжений статора к аналогичным напряжениям ротора.
Опыт короткого замыкания Схема соединений асинхронного двигателя при опыте к.з. остается, как и в опыте х.х. (см. рис. 14.1). Но при этом измерительные приборы должны быть выбраны в соответствии с пределами измерения тока, напряжения и мощности. Ротор двигателя следует жестко закрепить, предварительно установив его в положение, соответствующее среднему току к.з. С этой целью к двигателю подводят небольшое напряжение (UK = 0, 1Uном) и, медленно поворачивая ротор, следят за показанием амперметра, стрелка которого будет колебаться в зависимости от положения ротора двигателя. Объясняется это взаимным смещением зубцовых зон ротора и статора, вызывающего колебания индуктивных сопротивлений обмоток двигателя. Предельное значение тока статора при опыте к.з. устанавливают исходя из допустимой токовой нагрузки питающей сети и возможности провести опыт в минимальный срок, чтобы не вызвать опасного перегрева двигателя. Для двигателей мощностью до 1 кВт возможно проведение опыта начиная с номинального напряжения UK = 0, 1Uном.В этом случае предельный ток Iк = (1, 5 ÷ 2, 5)х I1ном. Для двигателей большей мощности сила предельного тока Iк = (2, 5 ÷ 5)х I1ном. При выполнении опыта к.з. в учебных целях можно ограничиться предельным током Iк = (1, 5 ÷ 2, 5)х I1ном. При выполнении опыта к.з. желательно соединение обмотки статора звездой. Определив диапазон изменения тока статора при опыте к.з., опыт начинают с предельного значения этого тока, установив на индукционном регуляторе соответствующее напряжение к.з. UK. Затем постепенно снижают это напряжение до значения, при котором ток Iк достигнет нижнего предела установленного диапазона его значений. При этом снимают показания приборов для 5—7 точек, одна из которых должна соответствовать номинальному току статора (IК = I1ном). Продолжительность опыта должна быть минимально возможной. С этой целью измеряют лишь одно линейное напряжение (например, UкАВ), так как некоторая несимметрия линейных напряжений при опыте к.з. не имеет значения. Линейные токи измеряют хотя бы в двух линейных проводах (например, IкА и IкВ). За расчетное значение тока к.з. принимают среднее арифметическое этих двух значений. После снятия последних показаний приборов двигатель следует отключить и сразу же произвести замер активного сопротивления фазы обмотки статора r/1, чтобы определить температуру обмотки. Линейные напряжения и токи пересчитывают на фазные Uк и Iк по формулам, аналогичным (14.3) и (14.4). Ваттметр W измеряет активную мощность к.з. Pк По полученным значениям напряжений UK, токов Iк и мощностей Рквычисляют следующие параметры: коэффициент мощности при к.з. cos φ к = Pк (m1 Uк Iк); (14.9) полное сопротивление к.з. (Ом) zк = Uк / Iк; (14.10) активные и индуктивные составляющие этого сопротивления (Ом) rк = rк соs φ к; (14.11) xк = Измеренные и вычисленные величины заносят в таблицу, а затем строят характеристики к.з.: Iк; Рк и cos φ к = f(Uк) (рис. 14.3). При опыте к.з. обмотки двигателя быстро нагреваются до рабочей температуры, так как при неподвижном роторе двигатель не вентилируется. Температуру (°С) обмотки Θ 1, обычно определяют по сопротивлению фазы r/2, измеренному непосредственно после
Рис. 14.3. Характеристики к.з. трехфазного асинхронного двигателя (3, 0 кВт, 220/380 В, 1430 об/мин)
проведения опыта, по формуле Θ 1 = [(r/1 – r1.20)(255/r1.20) ] + 20, (14.13) где — r1.20 сопротивление фазы обмотки статора в холодном состоянии (обычно при температуре 20 °С), Ом. Если же температура обмотки оказалась меньше расчетной рабочей температуры Θ 2 для соответствующего класса нагревостойкости изоляции двигателя (см. § 8.4), то активное сопротивление к.з. кк (Ом) пересчитывают на рабочую температуру: rк = r/к [1 + α (Θ 2 – Θ 1)] (14.14) где rк' - активное сопротивление к.з. при температуре Θ 1 отличающейся от расчетной рабочей; α = 0, 004. Затем пересчитывают на рабочую температуру полное сопротивление к.з. zk = На характеристиках к.з. (рис. 14.3) отмечают значения величин Рк.ном, Uк.ном, соответствующих току к.з. Iк = I1ном. Ток и мощность к.з. пересчитывают на номинальное напряжение U1ном: I/к = Iп ≈ I1ном (U1ном / Uк.ном); (14.15) Р/к ≈ Рк.ном (U1ном / Uк.ном)2 (14.16) Следует иметь в виду, что такой пересчет является приближенным, так как при UK = U1ном наступает магнитное насыщение сердечников (особенно зубцовых слоев) статора и ротора; это приводит к уменьшению индуктивного сопротивления хк, что не учитывается формулами (14.15) и (14.16). Кратность пускового тока равна Iп /Iном. Электромагнитная мощность в режиме к.з., передаваемая на ротор двигателя, равна электрическим потерям в обмотке ротора РЭ2к, поэтому электромагнитный момент при опыте к.з. (Н Мк ≈ Мп = Pэ2к /ω 1 = (Рк.ном - Рэ1к - Рм.к)/ω 1, где Рэ1к = m1 I2к.ном r1 — электрические потери в обмотке статора при опыте к.з. Магнитные потери при опыте к.з. Рм.к приближенно определяют по характеристикам х.х. (см. рис. 14.2) при напряжении U1 = UK. В режиме х.х. магнитный поток Ф больше, чем в режиме к.з., но если в режиме х.х. магнитные потери происходят только в сердечнике статора (см. § 13.1), то в режиме к.з. (s = 1) магнитные потери происходят еще и в сердечнике ротора, так как f2 = f1. Начальный пусковой момент получают пересчетом момента Мк на начальный пусковой ток Iп: Мп ≈ МК (IП/ IК)2. Затем определяют кратность пускового момента Мп/ Мном. Популярное:
|
Последнее изменение этой страницы: 2017-03-09; Просмотров: 1955; Нарушение авторского права страницы
 ; I0 = Iср (14.3)
; I0 = Iср (14.3)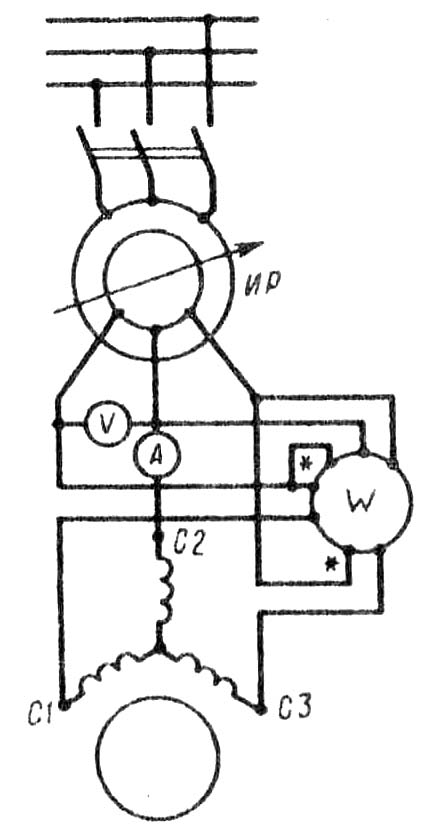
 (14.12)
(14.12)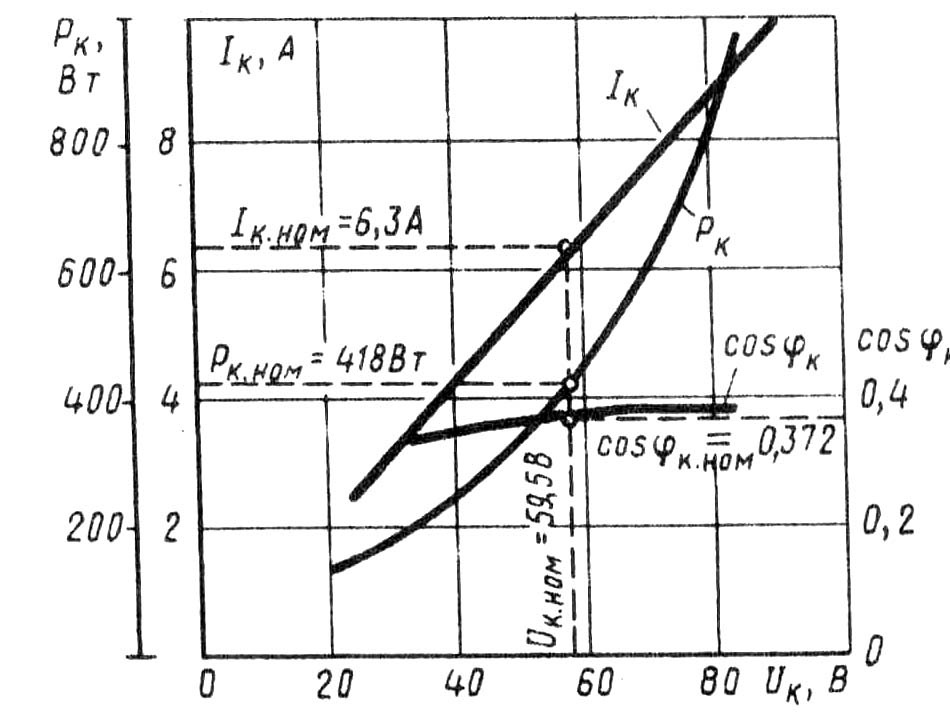
 , напряжение к.з. Uк = Iк zk и мощность к.з. Рк = m1 I2к rк.
, напряжение к.з. Uк = Iк zk и мощность к.з. Рк = m1 I2к rк. м)
м)