|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Потери и коэффициент полезного действия коллекторной машины постоянного тока
В машинах постоянного тока, как и в других электрических машинах, имеют место магнитные, электрические и механические потери (составляющие группу основных потерь) и добавочные потери. Магнитные потери Электрические потери в коллекторной машине постоянного тока обусловлены нагревом обмоток и щеточного контакта. Потери в цепи возбуждения определяются потерями в обмотке возбуждения и в реостате, включенном в цепь возбуждения:
Здесь
где сопротивление обмоток в цепи якоря Электрические потери также имеют место и в контакте щеток:
где Электрические потери в цепи якоря и в щеточном контакте зависят от нагрузки машины, поэтому эти потери называют переменными. Механические потери. В машине постоянного тока механические потери складываются из потерь от трения щеток о коллектор
трения в подшипниках
где окружная скорость коллектора (м/с) диаметром Механические и магнитные потери при стабильной частоте вращения Сумма магнитных и механических потерь составляют потери х.х.:
Если машина работает в качестве двигателя параллельного возбуждения в режиме х.х., то она потребляет из сети мощность Однако ввиду небольшого значения тока Таким образом, потери х.х. (магнитные и механические) могут быть определены экспериментально. В машинах постоянного тока имеется ряд трудно учитываемых потерь — добавочных. Эти потери складываются из потерь от вихревых токов в меди обмоток, потерь в уравнительных соединениях, в стали якоря из-за неравномерного распределения индукции при нагрузке, в полюсных наконечниках, обусловленных пульсацией основного потока из-за наличия зубцов якоря, и др. Добавочные потери составляют хотя и небольшую, но не поддающуюся точному учету величину. Поэтому, согласно ГОСТу, в машинах без компенсационной обмотки значение добавочных потерь Мощность (Вт) на входе машины постоянного тока (подводимая мощность): для генератора (механическая мощность)
где для двигателя (электрическая мощность)
Мощность (Вт) на выходе машины (полезная мощность): для генератора (электрическая мощность)
для двигателя (механическая мощность)
Здесь Коэффициент полезного действия. Коэффициент полезного действия электрической машины представляет собой отношение мощностей отдаваемой (полезной)
Определив суммарную мощность вышеперечисленных потерь
можно подсчитать КПД машины по одной из следующих формул: для генератора
для двигателя
Обычно КПД машин постоянного тока составляет 0, 75—0, 90 для машин мощностью от 1 до 100 кВт и 0, 90—0, 97 для машин мощностью свыше 100 кВт. Намного меньше КПД машин постоянного тока малой мощности. Например, для машин мощностью от 5 до 50 Вт
Рис. 29.13. Зависимость
Коэффициент полезного действия электрической машины можно определять: а) методом непосредственной нагрузки по результатам измерений подведенной Метод непосредственной нагрузки применим только для машин малой мощности, для остальных случаев применяется косвенный метод, как более точный и удобный. Установлено, что при Существует несколько косвенных способов определения КПД. Наиболее прост способ холостого хода двигателя, когда потребляемая машиной постоянного тока мощность затрачивается только на потери х.х. [см. (29.26)]. Что же касается электрических потерь, то их определяют расчетным путем после предварительного измерения электрических сопротивлений обмоток и приведения их к рабочей температуре. Пример 29.1. Двигатель постоянного тока параллельного возбуждения (см. рис. 29.3) включен в сеть с напряжением 220 В. При номинальной нагрузке и частоте вращения Решение. Ток возбуждения
Электрические потери в цепи якоря по (29.19)
Электрические потери в щеточном контакте по (29.20)
Подводимая к двигателю мощность по (29.28)
Добавочные потери
Суммарные потери по (29.31)
Полезная мощность двигателя
КПД двигателя при номинальной нагрузке
Из выражения (29.5) получим
ЭДС якоря при частоте вращения 1000 об/мин по (25.20)
Так как ток якоря прямо пропорционален моменту
Электрические потери в добавочном сопротивлении
Полезная мощность двигателя при частоте вращения 1000 об/мин
Расчет полезной мощности
§ 29.9. Машины постоянного тока серий 4П и 2П
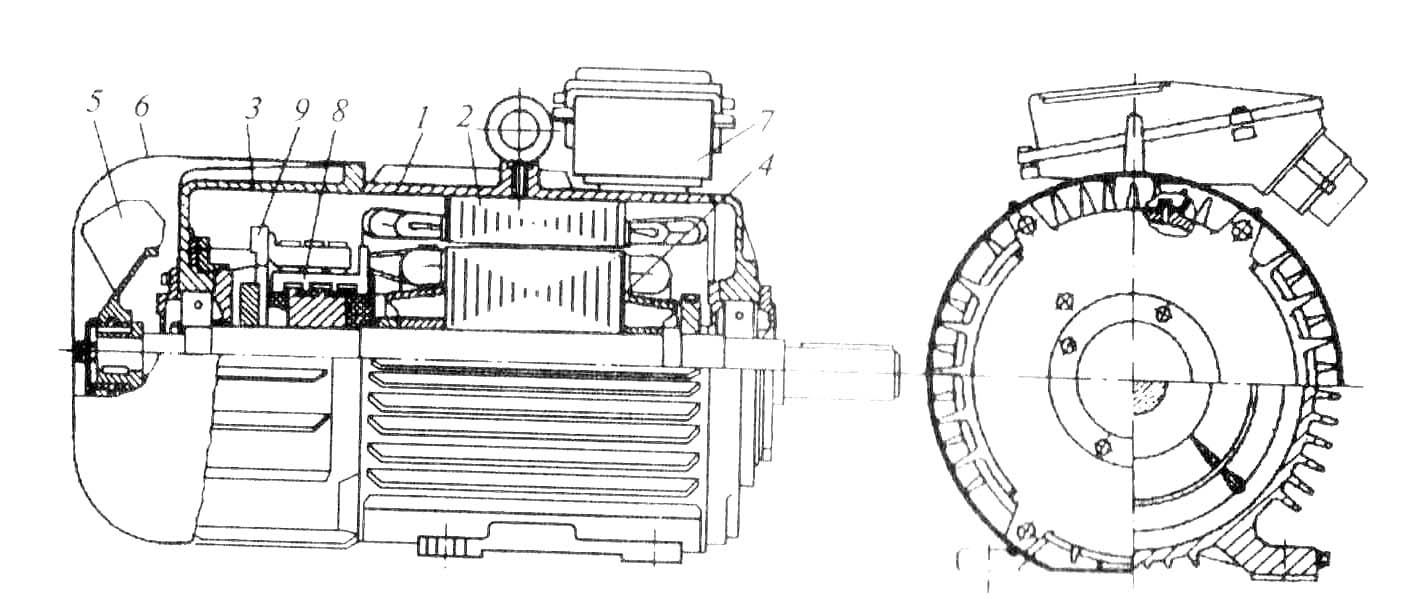
Стремительное развитие автоматизации производства привело к необходимости создания двигателей постоянного тока с широким диапазоном регулирования частоты вращения (до 1: 1000) с хорошими динамическими свойствами. Этим требованиям соответствуют двигатели серии 4П. Серия охватывает двигатели с высотой оси вращения от 80 до 450 мм следующих модификаций. Двигатели типа 4ПО и 4ПБ охватывают диапазон мощности от 0, 126 до 5, 5 кВт при номинальной частоте вращения от 750 до 3000 об/мин. Двигатели допускают регулирование частоты вращения вниз от номинальной уменьшением напряжения на обмотке якоря при снижении тока до 0, 5 Конструкция этих двигателей унифицирована с асинхронными двигателями серии 4А. Это позволило применить для производства некоторых узлов двигателей типа 4ПО и 4ПБ технологическое оборудование, применяемое в производстве двигателей серии 4А. В унифицированной конструкции этих двигателей магнитопровод статора неявнополюсный с распределенными в пазах обмотками. Так, обмотка возбуждения (независимая) укладывается в два паза в пределах каждого полюсного деления, остальные пазы занимает компенсационная обмотка. В двигателях типа 4ПО и 4ПБ и двигателях серии 4А одинакового габарита могут быть применены одинаковые станины, задние подшипниковые шиты, коробки выводов, подшипники и т. п. Применение распределенных обмоток на статоре двигателей типа 4ПО и 4ПБ улучшило процесс охлаждения и позволило увеличить токовые нагрузки на обмотки возбуждения и компенсационную. Кроме того, распределенная конструкция обмоток статора способствует лучшей компенсации реакции якоря и улучшению коммутации. Двигатели постоянного тока типов 4ПО и 4ПБ имеют закрытое исполнение со степенью защиты IР44 со способами охлаждения IС0141 (наружный обдув) в двигателях типа 4ПО (рис. 29.14) и IС0041 (естественное охлаждение) в двигателях типа 4ПБ.
Рис. 29.14. Двигатель постоянного тока типа 4IIО унифицированной конструкции; / — корпус; 2 — магнитопровод статора с распределенными обмотками; 3 — шит подшипниковый передний; 4 — сердечник якоря; 5 — вентилятор, 6 — кожух вентилятора; 7 — коробка выводов; 8 — коллектор, 9 — траверса.
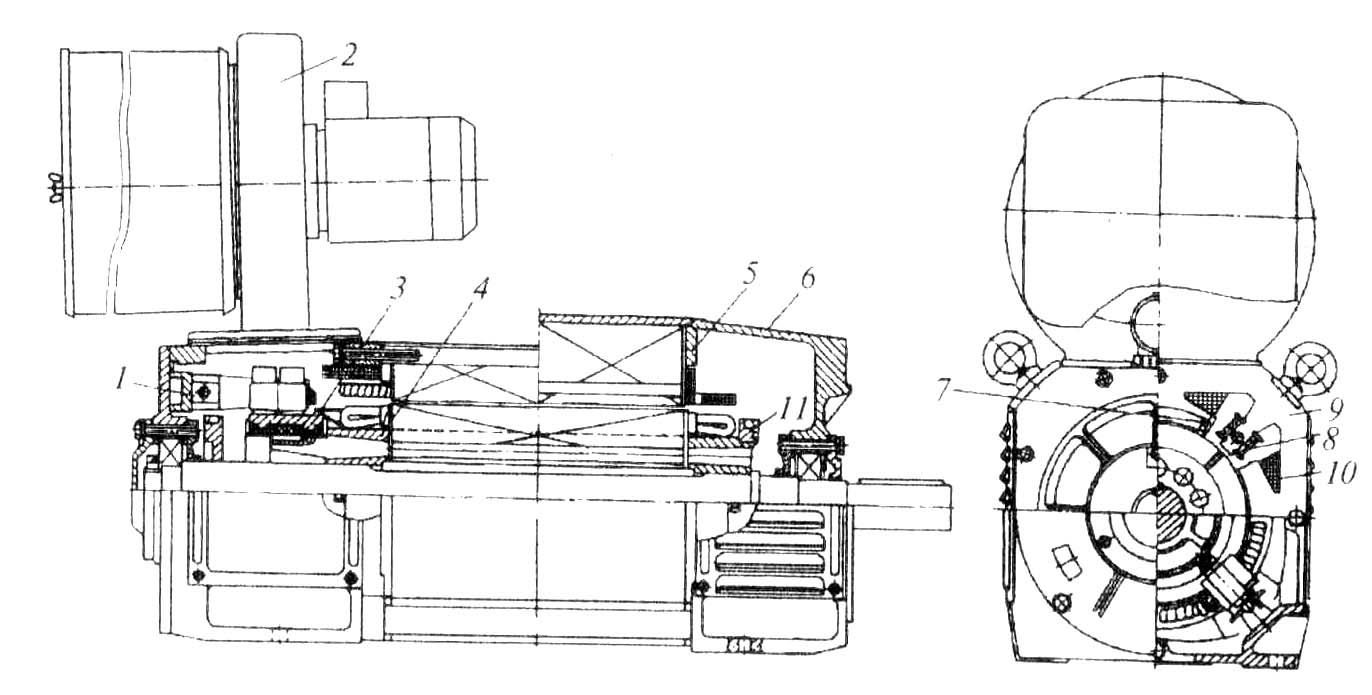
Широкорегулируемые двигатели типа 4ПФ предназначены для привода станков с программным управлением, роботизированных производственных комплексов. Исполнение двигателей по степени защиты IР23 (защищенные), способ охлаждения IС06 (независимая вентиляция). Двигатели охватывают номинальные мощности от 2, 0 до 250 кВт при высоте оси вращения от 112 до 250 мм. Напряжение питания 220 и 440 В. Регулирование частоты вращения возможно изменением подводимого к обмотке якоря напряжения от 0 до 460 В. Допускается также регулирование частоты вращения ослаблением поля возбуждения (уменьшением тока в обмотке возбуждения). Статор двигателей восьмигранный шихтованный, явнополюсный (рис. 29.15). Пакет статора запрессован между двумя нажимными плитами толщиной 10 мм. Подшипниковые шиты литые чугунные.
Рис. 29.15. Двигатель постоянного тока типа 4ПФ: 1 — траверса; 2 — вентилятор наружный; 3 — коллектор; 4 — обмоткодержатель якоря; 5 — нажимная плита статора; 6 — подшипниковый щит; 7 — обмотка компенсационная; 8 — дополнительный полюс; 9 — статор; 10 — обмотка независимого возбуждения; 11 — балансировочное кольцо
Катушки возбуждения намотаны на главные полюса, катушки дополнительной обмотки надеты на добавочные полюса, компенсационная обмотка расположена в пазах полюсных наконечников. Наружный вентилятор может быть снабжен фильтром для очистки воздуха от пыли и мелких частиц. Вентилятор расположен на боковой или торцевой поверхности со стороны коллектора. Крупные двигатели 4П для тяжелых условий эксплуатации предназначены для привода крупных металлорежущих станков, механизмов металлургического производства, с частыми пусками, остановками, реверсами, набросами и неравномерностью нагрузки. Двигатели изготавливаются с высотой оси вращения 355 и 450 мм мощностью от 110 до 800 кВт; напряжение питания 440 и 600 В. Возбуждение независимое напряжением 220 В. Вентиляция от постороннего вентилятора. Двигатели имеют степень защиты IР44 и IР23.
Популярное:
|
Последнее изменение этой страницы: 2017-03-09; Просмотров: 757; Нарушение авторского права страницы
 происходят только в сердечнике якоря, так как только этот элемент магнитопровода машины постоянного тока подвергается перемагничиванию. Величина магнитных потерь, состоящих из потерь от гистерезиса и потерь от вихревых токов, зависит от частоты перемагничивания
происходят только в сердечнике якоря, так как только этот элемент магнитопровода машины постоянного тока подвергается перемагничиванию. Величина магнитных потерь, состоящих из потерь от гистерезиса и потерь от вихревых токов, зависит от частоты перемагничивания  значений магнитной индукции в зубцах и спинке якоря, толщины листов электротехнической стали, ее магнитных свойств и качества изоляции этих листов в пакете якоря.
значений магнитной индукции в зубцах и спинке якоря, толщины листов электротехнической стали, ее магнитных свойств и качества изоляции этих листов в пакете якоря. (29.18)
(29.18) — напряжение на зажимах цепи возбуждения. Потери в обмотках цепи якоря
— напряжение на зажимах цепи возбуждения. Потери в обмотках цепи якоря (29.19)
(29.19) , приведенное к расчетной рабочей температуре
, приведенное к расчетной рабочей температуре  , определяется по (13.4) с учетом данных, приведенных в § 13.1 и § 8.4.
, определяется по (13.4) с учетом данных, приведенных в § 13.1 и § 8.4. (29-20)
(29-20) — переходное падение напряжения, В, на щетках обеих полярностей, принимаемое в соответствии с маркой щеток по табл. 27.1.
— переходное падение напряжения, В, на щетках обеих полярностей, принимаемое в соответствии с маркой щеток по табл. 27.1. (29.21)
(29.21) и на вентиляцию
и на вентиляцию 
 (29.22)
(29.22) — коэффициент трения щеток о коллектор
— коэффициент трения щеток о коллектор 
 — поверхность соприкосновения всех щеток с коллектором, м2;
— поверхность соприкосновения всех щеток с коллектором, м2;  — удельное давление, Н/м2, щетки [для машин общего назначения
— удельное давление, Н/м2, щетки [для машин общего назначения  (м)
(м) . (29.23)
. (29.23) можно считать постоянными.
можно считать постоянными. . (29.24)
. (29.24) . (29.25)
. (29.25) электрические потери
электрические потери  и
и  весьма малы и обычно не превышают 3% потерь
весьма малы и обычно не превышают 3% потерь  . Поэтому, не допуская заметной ошибки, можно записать
. Поэтому, не допуская заметной ошибки, можно записать  , откуда потери х.х.
, откуда потери х.х. . (29.26)
. (29.26) принимают равным 1% от полезной мощности для генераторов или 1% от подводимой мощности для двигателей. В машинах с компенсационной обмоткой значение добавочных потерь принимают равным соответственно 0, 5%.
принимают равным 1% от полезной мощности для генераторов или 1% от подводимой мощности для двигателей. В машинах с компенсационной обмоткой значение добавочных потерь принимают равным соответственно 0, 5%. (29.27)
(29.27) — вращающий момент приводного двигателя, Н∙ м;
— вращающий момент приводного двигателя, Н∙ м;  . (29.28)
. (29.28) ; (29.29)
; (29.29) . (29.30)
. (29.30) и
и  — момент на валу электрической машины, Н-м;
— момент на валу электрической машины, Н-м;  — частота вращения, об/мин.
— частота вращения, об/мин. к подводимой (потребляемой)
к подводимой (потребляемой)  ,:
,:  .
. , (29.31)
, (29.31) ; (29.32)
; (29.32) . (29.33)
. (29.33) = 0, 15÷ 0, 50. Указанные значения КПД соответствуют номинальной нагрузке машины. Зависимость КПД машины постоянного тока от нагрузки выражается графиком
= 0, 15÷ 0, 50. Указанные значения КПД соответствуют номинальной нагрузке машины. Зависимость КПД машины постоянного тока от нагрузки выражается графиком  , форма которого характерна для электрических машин (рис. 29.13).
, форма которого характерна для электрических машин (рис. 29.13).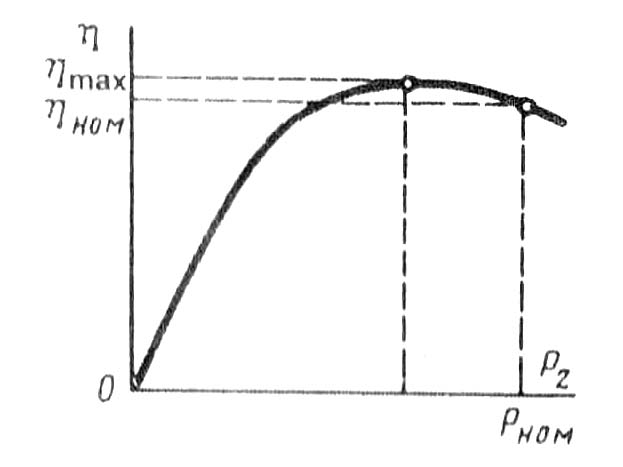
 > 80 % измерять КПД методом непосредственной нагрузки нецелесообразно, так как он дает большую ошибку, чем косвенный метод.
> 80 % измерять КПД методом непосредственной нагрузки нецелесообразно, так как он дает большую ошибку, чем косвенный метод. об/мин он потребляет ток
об/мин он потребляет ток  = 43 А. Определить КПД двигателя при номинальной нагрузке, если ток х.х.
= 43 А. Определить КПД двигателя при номинальной нагрузке, если ток х.х.  = 4 А, а сопротивления цепей якоря
= 4 А, а сопротивления цепей якоря  = 0, 25 Ом и возбуждения
= 0, 25 Ом и возбуждения  = 150 Ом. При каком добавочном сопротивлении
= 150 Ом. При каком добавочном сопротивлении  , включенном последовательно в цепь якоря, частота вращения двигателя будет
, включенном последовательно в цепь якоря, частота вращения двигателя будет  )?
)?  = 220/150 =1, 47 А. Ток якоря в режиме х.х.
= 220/150 =1, 47 А. Ток якоря в режиме х.х.  = 4 - 1, 47 = 2, 53 А. Ток якоря номинальный
= 4 - 1, 47 = 2, 53 А. Ток якоря номинальный  = 43 - 1, 47 = 41, 53 А. Сумма магнитных и механических потерь
= 43 - 1, 47 = 41, 53 А. Сумма магнитных и механических потерь  = 220- 2, 53 -2, 532- 0, 25 = 555 Вт. Электрические потери в цепи возбуждения по (29.18)
= 220- 2, 53 -2, 532- 0, 25 = 555 Вт. Электрические потери в цепи возбуждения по (29.18) Вт.
Вт. Вт.
Вт. Вт.
Вт. Вт.
Вт. Вт.
Вт. Вт.
Вт. Вт.
Вт. .
.
 В.
В. [см (25.24)], то при
[см (25.24)], то при  сила тока
сила тока  после включения
после включения  А. Из выражения тока якоря (29.2) получим
А. Из выражения тока якоря (29.2) получим Ом.
Ом. Вт.
Вт. Вт.
Вт. является приближенным, так как он не учитывает уменьшение механических потерь двигателя при его переходе на меньшую частоту вращения.
является приближенным, так как он не учитывает уменьшение механических потерь двигателя при его переходе на меньшую частоту вращения.