|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Продольное управление ЛА. Стабилизатор и руль высоты
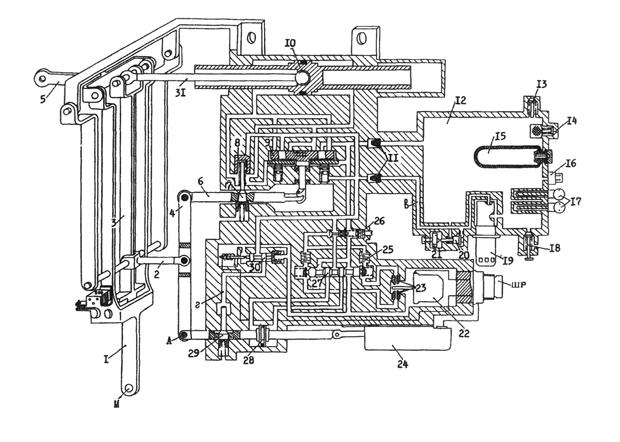
На современном ЛА в канале продольного управления используются переставной стабилизатор и руль высоты (РВ). Переставной стабилизатор является составной частью горизонтального оперения самолёта. Он состоит из правой и левой секций, соединенных между собой. Управление стабилизатором обеспечивает балансировку самолёта в полёте по продольному каналу путем перестановки стабилизатора на заданные балансировочные углы. При этом руль высоты удерживается в положении близком к нейтральному. Стабилизатор (совместно с рулём высоты) предназначен для обеспечения продольной устойчивости и управляемости самолёта. Управление переставным стабилизатором осуществляется на этапах взлёта, крейсерского полёта и посадки. Перестановка стабилизатора может осуществляться автоматически или вручную. В зависимости от режима полёта и положения устройств механизации крыла скорость перестановки стабилизатора различная. При выпущенных устройствах механизации крыла обычно скорость перестановки стабилизатора – максимальная. Управление переставным стабилизатором На современных ЛА в качестве исполнительного механизма управления переставным стабилизатором обычно используется винтовой механизм, приводимый в движение либо от электрической системы ЛА, либо от гидравлической. Так как в настоящем курсе мы рассматриваем гидромеханические системы, то в дальнейшем будем рассматривать лишь те конструкции, в которых источником энергии является ГС ЛА. В качестве примера рассмотрим систему управления переставным стабилизатором самолета Ил-86. Винтовой механизм (см.Рис.1.30) предназначен для отклонения стабилизатора и фиксации его в заданном положении. Механизм изменяет угол установки стабилизатора, поднимая или опуская узел, закрепленный на его переднем лонжероне, и тем самым отклоняя стабилизатор относительно оси вращения, расположенной в районе заднего лонжерона. Винтовой механизм состоит их ходового винта, верхнего и нижнего приводов (блоков гидромоторов с тормозом, редуктора и блока концевых выключателей), верхнего и нижнего карданных подвесов.
Рис.1.30
Ходовой винт представляет собой полый стержень с наружной трапецеидальной резьбой. Для увеличения надежности внутрь винта установлен стяжной стержень (дублер). При разрушении одного стержня второй полностью несет всю нагрузку. На обоих концах винта установлены механические упоры. На нижней части винта закреплены два двуплечих рычага с роликами на концах, которые при движении винта вверх-вниз перемещаются по двум неподвижным направляющим и не позволяют винту вращаться. Управление рулем высоты Управление самолетом в продольной плоскости, помимо управляемого (переставного) стабилизатора, осуществляется рулем высоты, расположенным на задней кромке стабилизатора. РВ, например, у самолета Ил-76 отклоняется вверх на 21° и вниз на 15°. Проводка управления РВ жесткая, выполнена двумя ветвями, разнесенными по бортам. Управление РВ осуществляется с помощью двух штурвальных колонок на местах летчиков, а также с помощью двух рулевых машин (РМ) автопилота, подключенных к ветвям проводки управления РВ. Ветвь проводки от левой штурвальной колонки проложена по левому борту и присоединена к левой секции РВ, а от правой штурвальной колонки - по правому борту и присоединена к правой секции РВ. В отсеке между шпангоутами 76-78 расположены три автономные рулевые машины (АРМ), из них две АРМ установлены в левой ветви проводки, а одна АРМ - в правой. В связи с тем, что бустеры АРМ работают по необратимой схеме, имеются левое и правое загрузочные устройства (ЗУ), расположенные под полом кабины летчиков, причем каждое ЗУ создает половину требуемой загрузки штурвальных колонок. В обычных условиях работают все три АРМ. Обе ветви проводки управления РВ соединены между собой элементами жесткой связи в районе установки штурвалов, а также в районе установки АРМ (за АРМ и до АРМ). В аварийной обстановке ветви проводок управления РВ могут быть рассоединены с помощью пиромеханизмов. Положение РВ определяется по индикатору, расположенному на приборной доске левого летчика. Таким образом, принципиальная особенность самолета Ил-76 заключается в том, что система управления не является функциональной подсистемой ГС, а источником энергии является автономный гидравлический привод в виде АРМ. Рассмотрим его конструкцию подробнее. Автономная рулевая машина (APМ) является следящим гидроприводом с индивидуальным источником питания автономного типа. Рассмотрим конструкцию и работу АРМ на примере АРМ-62 самолета Ил-76. Гидропривод входит в систему управления самолетом и предназначен для перемещения основных поверхностей управления. АРМ (см.Рис.1.31) конструктивно представляет собой единый агрегат, смонтированный из блоков: -блок бака; -рулевой механизм; -насосная станция; -система рычагов и качалок и др. Распределитель с плоским поворотным золотником 9, силовой гидроцилиндр 10 и входной рычаг 1, который связан с золотником посредством тяг и качалок 2, 4, 6 и с исполнительным штоком посредством тяги 3 и двух качалок образуют бустер. Электромеханический преобразователь (поляризованное реле) 22, золотник демпфера 27, дроссели 25, сопла 23, редукционный клапан 26, цилиндр демпфера 28 и датчик обратной связи 24 образуют рулевую машину демпфера. Бустер и рулевая машина демпфера подсоединены к источнику гидропитания (насосной станции 19) параллельно и вместе с ним составляют гидропривод с замкнутой и закрытой циркуляцией гидрожидкости и дроссельным регулированием. В блок бака входят бак 12, гидрокомпенсатор 15, зарядный клапан 14, клапан стравливания 13, предохранительный клапан слива 18, приемники электротермометров сопротивления 17 и узел реле давления 20. Бак 12 является резервуаром гидросистемы АРМ. Гидрокомпенсатор 15, помещенный внутри бака, поддерживает начальное давление на входе в насосную станцию, компенсирует температурные изменения объема жидкости и сглаживает колебания давления в гидросистеме АРМ. Он представляет собой оболочку из эластичной маслостойкой резины, в которой находится сжатый азот. Предохранительный клапан слива 18 ограничивает максимальное давление жидкости в баке. Для распределения рабочей жидкости в полости гидроцилиндра служит распределитель, в состав которого входит плоский поворотный золотник 9. Золотник поворачивается в полости, образованной распределительной втулкой, опорным кольцом и опорной пятой, с помощью центральной оси. Золотник посредством центральной оси, качалки, тяги и дифференциальной качалки шарнирно соединен с входным рычагом 1, перемещения которого преобразуются в угловые повороты золотника. Основными элементами узла поляризованного реле 22 являются кронштейн, реле, рычаг, контактная колодка и вилка ШР. Рычаг служит заслонкой гидроусилителя типа сопло-заслонка и крепится на оси реле. Электромагнитное поляризованное реле преобразует ток управления в пропорциональные ему отклонения заслонки гидроусилителя демпфера. Насосная станция состоит из аксиально-плунжерного насоса переменной производительности и приводного электродвигателя переменного тока. Насос переменной производительности выполняет также функцию регулирующего элемента системы и создает такую мощность, которая требуется для преодоления шарнирного момента. Насосная станция крепится к стенке бака резьбовыми шпильками. Входной канал насоса соединяется с внутренним каналом в корпусе бака.
Популярное:
|
Последнее изменение этой страницы: 2017-03-11; Просмотров: 3071; Нарушение авторского права страницы