|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Подсистема управления предкрылками и закрылками
Закрылки — отклоняемые поверхности, симметрично расположенные на задней кромке крыла. Закрылки в убранном состоянии являются продолжением поверхности крыла, тогда как в выпущенном состоянии могут отходить от него с образованием щелей. Используются для улучшения несущей способности крыла во время взлёта, набора высоты, снижения и посадки, а также при полёте на малых скоростях. Принцип работы закрылков заключается в том, что при их выпуске увеличивается кривизна профиля, а в случае выдвижных закрылков также площадь поверхности крыла, следовательно, увеличивается и подъёмная сила. Возросшая подъёмная сила позволяет летательным аппаратам лететь без сваливания при меньшей скорости. Таким образом, выпуск закрылков является эффективным способом снижения взлётной и посадочной скоростей. Вместе с тем, при выпуске закрылков увеличивается сопротивление, что является нежелательным. Поэтому на взлёте закрылки выпускаются всегда на меньший угол, нежели при посадке. При выпуске закрылков также меняется продольная балансировка самолёта из-за возникновения дополнительного продольного момента. Это усложняет управление самолётом (на многих современных самолётах пикирующий момент при выпуске закрылков компенсируется перестановкой стабилизатора на заданный отрицательный угол). Закрылки, образующие при выпуске профилированные щели, называют щелевыми. Закрылки могут состоять из нескольких секций, образуя несколько щелей (как правило, от одной до трёх). К примеру, на Ту-154М применяются двухщелевые закрылки, а на Ту-154Б — трёхщелевые. Наличие щели позволяет потоку перетекать из области повышенного давления (нижняя поверхность крыла) в область пониженного давления (верхняя поверхность крыла). Щели спрофилированы так, чтобы вытекающая из них струя была направлена по касательной к верхней поверхности, а сечение щели должно плавно сужаться для увеличения скорости потока. Пройдя через щель, струя с высокой энергией взаимодействует с «вялым» пограничным слоем и препятствует образованию завихрений и отрыву потока. Это мероприятие и позволяет «отодвинуть» срыв потока на верхней поверхности крыла на бо́ льшие углы атаки и бо́ льшие значения подъемной силы. Предкрылки — отклоняемые поверхности, установленные на передней кромке крыла. При отклонении образуют щель, аналогичную таковой у щелевых закрылков. Предкрылки, не образующие щели, называются отклоняемыми носками. Как правило, предкрылки автоматически отклоняются одновременно с закрылками, но могут и управляться независимо. В целом, эффект функционирования предкрылков заключается в увеличении допустимого угла атаки, то есть срыв потока с верхней поверхности крыла происходит при бо́ льшем угле атаки. На современных самолетах предкрылки и закрылки обычно выполняют многосекционными, что предотвращает их заклинивание при деформациях консолей крыла под действием внешних нагрузок. Учитывая особую важность синхронного выпуска предкрылков и закрылков для обеспечения безопасности полетов, на современных ЛА часто используют для их выпуска и уборки винтовые механизмы, приводимые в движение от гидравлической или электрической систем. Так, на рис.1.35 изображена принципиальная схема управления предкрылками самолета Ил-86. На каждой консоли крыла установлено шесть секций предкрылков, которые отклоняются при помощи девяти винтовых механизмов. В свою очередь крутящий момент на винтовые механизмы передается трансмиссией, проходящей через всю консоль крыла. Такая конструкция системы позволяет достаточно просто обеспечить синхронность выпуска предкрылков.
Источником энергии является гидравлическая система (ГС1 и ГС3), которая обеспечивает работу рулевого привода. В систему управления предкрылками входят: ручка управления предкрылками и закрылками; электродистанционная система контроля и управления с задающим блоком предкрылков МКВ-47; рулевой привод РП71-01; блок концевых выключателей МКВ-45; трансмиссия; обводной и два угловых редуктора, 18 винтовых механизмов с муфтой предельных нагрузок в каждом. При перемещении ручки замыкаются соответствующие контакты в МКВ-47 и подается питание на блок концевых выключателей МКВ-45 и электрогидравлические клапаны рулевого привода. Рулевой привод РП71-01 - двухканальный электрогидравлический механизм реверсивного действия вращательного типа. Мощность привода составляет 8, 8 л.с. Вращение от рулевого привода передается на редуктор, от которого трансмиссия идет в двух направлениях: к левым и правым предкрылкам. На редукторе установлен блок концевых выключателей МКВ-45, который механически связан с трансмиссией предкрылков. Замыкание и размыкание контактов в МКВ-45 происходит в зависимости от положения предкрылков. Назначение трансмиссии - передача движения от рулевого привода к винтовым механизмам предкрылков. Трансмиссия, кроме того, обеспечивает синхронный выпуск и уборку левых и правых предкрылков. Трансмиссия представляет собой ряд валов, соединенных между собой в одну непрерывную цепь карданами. Валы вращаются в 22 опорах на переднем лонжероне крыла. В местах выхода трансмиссии из центроплана установлены угловые редукторы. Угловые редукторы предназначены для изменения направления прокладки трансмиссии. Подобную конструкцию может иметь и система управления закрылками. В качестве примера рассмотрим систему управления закрылками самолета Ил-76 (рис.1.36). Трехщелевые раздвижные закрылки, предназначенные для увеличения подъемной силы крыла при взлете и посадке, расположены за задним лонжероном крыла и разделены на внутренние и внешние. Время выпуска закрылков не более 30 сек, время уборки - не более 30 сек. Закрылками управляют с помощью ручки, установленной на центральном пульте в кабине летчиков слева от ручки управления предкрылками. Ручка приводит в действие электросистему, которая управляет гидроприводом РП60-3, получающем питание от гидросистем ГС1 и ГС2. Гидропривод, установленный в отсеке гидрооборудования за центропланом, с помощью обводного, угловых редукторов и валов трансмиссии приводит в действие шариковые винтовые механизмы, которые, в свою очередь, приводят в действие основное звено каждого закрылка. Раздвижка звеньев закрылка осуществляется механизмом раздвижки, расположенным внутри закрылка. Выпуск закрылков до 30° происходит без раздвижки. С увеличением угла выпуска более 30° закрылки раздвигаются. При уборке закрылков порядок обратный. Для фиксации закрылков в крайнем или любом промежуточном положении служат тормоза, имеющиеся в гидроприводе, установлены противоуборочные электромеханические тормоза ТЭМ-4, предназначенные для автоматического останова закрылков в случае обрыва (рассоединения) трансмиссии. Крайние положения закрылков определяются регулировкой механизма концевых выключателей, который установлен на корпусе гидропривода. При отладке и регулировке управления закрылками на техническом обслуживании пользуются ручным приводом. При установке ручки управления закрылками на центральном пульте в положение " Уборка" или " Выпуск" питание подается на обмотки гидроклапанов привода РП60-3. Гидроклапаны, срабатывая, подводят давление из гидросистем 1 и 2 по каналам к управляющим золотникам привода и в полости тормозов. Положение золотников обусловливает вращение гидродвигателей в направлении, соответствующем уборке или выпуску закрылков. Одновременно освобождаются тормоза и с ними вся трансмиссия управления закрылками. Гидродвигатели через дифференциальный редуктор приводят в действие выходной вал привода. Далее с помощью обводного и угловых редукторов, валов и редукторов винтовых механизмов пригодятся во вращение ходовые винты винтовых механизмов, что вызывает перемещение гаек и, таким образом, движение закрылков. При установке ручки управления закрылками в среднее положение электроцепи гидроклапанов размыкаются дважды: по плюсовой и минусовой цепям, что повышает надежность электросистемы управления. Обесточенные гидроклапаны перекрывают магистрали подачи, вследствие чего падает давление жидкости в каналах управляющих золотников и полостях тормозов. Золотники занимают нейтральное положение, гидродвигатели останавливаются. Одновременно затормаживаются валы тормозов, а вместе с ними и вся трансмиссия управления закрылками. Закрылки удерживаются в заданном положении тормозами привода. Аналогично действие системы при размыкании электроцепей гидроклапанов в крайних положениях закрылков.
Рулевой привод РП-60 предназначен для отклонения закрылков и предкрылков на самолете Ил-76 через механическую трансмиссию и является реверсивным электрогидравлическим усилительным механизмом вращательного типа. Для увеличения надежности работы гидравлические и электрические элемента привода зарезервированы и составляет два одновременно работающих канала, имеющих общую механическую часть - дифференциальный редуктор, суммирующий мощность двух каналов на выходной валу привода. Гидравлическое питание каждого канала осуществляется от независимых гидросистем самолета, а электрическое питание - от независимых источников питания. При отказе одного из каналов привода скорость вращения на выходном валу снижается в два раза при сохранении крутящего момента. При техническом обслуживании и отсутствии давления в гидросистемах самолета вращение выходного вала привода производится от ручного привода с помощью съемного приспособления Рулевой привод состоит из следующих основных узлов:
-редуктора; -двух гидродвигателей и двух тормозов.
Рис.1.37. Схема рулевого привода РП-60
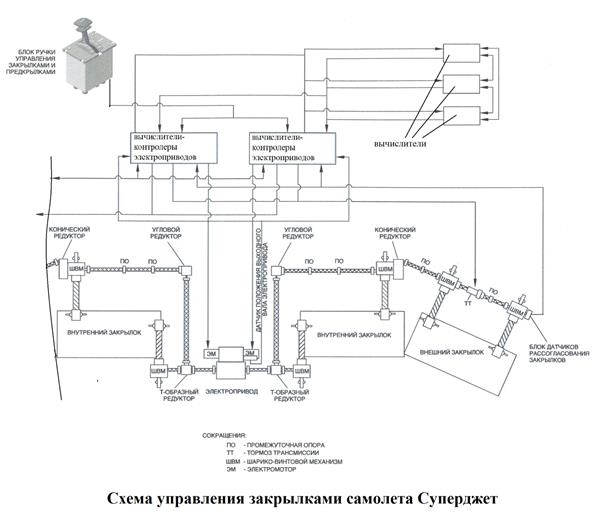
Головка управления (Рис.1.37) является двухкаскадным электрогидроусилителем, преобразующим электрический сигнал в расход рабочей жидкости и служит для управления работой гидродвигателя и тормоза. Редуктор предназначен для суммирования мощности двух каналов и передачи вращения от двух гидродвигателей или ручного привода на выходной вал, а также для привода механизма концевых выключателей МКВ-42А-2сер. При этом редуктор понижает число оборотов гидродвигателей до требуемого числа оборотов на выходном валу. Гидродвигатель предназначен для преобразования энергии рабочей жидкости в механическую работу и представляет собой девятиплунжерный двигатель аксиального типа с вращавшимся блоком цилиндров (ротором) и неподвижным наклонным диском. Тормоз предназначен для фиксации вала гидродвигателя в любом положении, предотвращая проворачивание его от внешней нагрузки при отсутствии сигнала управления. На современных самолетах может использоваться и электрическая система управления закрылками, например, на самолете Суперджет (рис.1.38).
Рис.1.38
Популярное:
|
Последнее изменение этой страницы: 2017-03-11; Просмотров: 2298; Нарушение авторского права страницы

 -двух головок управления;
-двух головок управления;