|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Тема 1.4. Функциональные подсистемы управления ЛА и механизацией крылаСтр 1 из 6Следующая ⇒
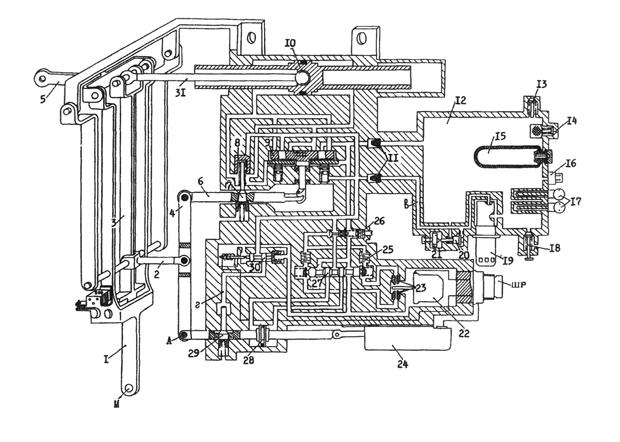
Лекция 3 Тема 1.4. Функциональные подсистемы управления ЛА и механизацией крыла Система управления летательным аппаратом Введение Система управления самолетом служит для обеспечения полета по заданной траектории путем создания на крыле и оперении потребных аэродинамических сил и моментов. Возможны три типа систем управления – неавтоматическая (ручное управление), полуавтоматическая и автоматическая. Ручное управление, в свою очередь, может быть бустерным и безбустерным. В неавтоматической системе управления летчик, оценивая обстановку, обеспечивает выработку управляющих сигналов и с помощью командных рычагов через проводку управления отклоняет рулевые поверхности. В полуавтоматической системе управляющие сигналы летчика преобразуются и усиливаются различного рода автоматами и усилителями, обеспечивая оптимальные характеристики устойчивости и управляемости самолета. Автоматические системы обеспечивают полную автоматизацию отдельных этапов полета, освобождая летчика от непосредственного участия в управлении самолетом. Однако и в этом случае предусматривается возможность перехода на ручное управление летчиком, для чего в кабине сохраняются обычные командные посты управления, связанные с рулями проводкой управления. В общем случае СУ включает: - звено управления, на которое непосредственно воздействует летчик (ручка управления, штурвальная колонка, педали, джойстик и др.); -устройства дистанционной передачи управляющего сигнала (механическая, электрическая или комбинированная проводка управления); -исполнительный механизм, приводящий в движение поверхность управления; -источник и система энергопитания. В зависимости от используемого источника энергопитания принято системы управления подразделять на следующие виды: -механическая СУ, когда единственным источником энергии, используемым для управления ЛА, является мускульная сила летчиков; -электромеханическая СУ, когда совместно с мускульной силой летчиков используется энергия бортовых источников электропитания; -электрогидромеханическая СУ, т.е. использующая мускульную силу летчиков, энергию бортовых источников электропитания и гидропитания. Электродистанционная система управления Передача управляющих сигналов от летчика к органу управления может обеспечиваться электродистанционной системой управления (ЭДСУ). В такой системе сохраняются обычные командные посты управления или могут использоваться командные рычаги управления уменьшенных размеров - уменьшенная штурвальная колонка, рукоятка на подлокотнике, джойстик и др. Механические перемещения командных рычагов в этой системе преобразуются в аналоговый или цифровой электросигнал, который передается электропроводкой к рулевому приводу, установленному непосредственно у рулевой поверхности. Перемещение силового привода управляется электросигналами командного рычага и за счет обратной связи создается следящая система, в которой руль строго следит за перемещениями командного рычага точно так же, как это происходит в системах с механической проводкой управления. Для повышения надежности ЭДСУ передача электросигналов происходит по 3-4 независимым каналам, проложенным в разных местах конструкции тех агрегатов, по которым проходит проводка управления. Электродистанционная проводка управления обеспечивает: -снижение массы системы управления; -практически не требует объемов для ее прокладки, проста и удобна в обслуживании; -упрощается включение в систему управления любых автоматических устройств, не требуя установки дополнительных силовых приводов. Это позволяет создавать единую автоматизированную бортовую систему - АБСУ, обеспечивающую высокое качество управления на всех режимах полета самолета. В такой системе сигналы летчика и автоматов суммируются на электрическом уровне и выдаются на единый силовой привод органа управления. Недостаточный опыт использования ЭДСУ пока еще заставляет дублировать ее резервной механической проводкой управления, но уже эксплуатируются самолеты без дублирования с многократно резервированной и высоконадежной системой электрического управления. Возникающие в полете усилия управления можно разделить на балансировочные и маневренные. Балансировочные усилия управления действуют в длительном установившемся режиме полета и обеспечивают уравновешивание (балансировку) самолета на этом режиме. Такие усилия лишь утомляют летчика и поэтому от них желательно избавиться. Снятие балансировочных усилий с командных рычагов обеспечивается установкой на рулях триммеров - небольших поверхностей, шарнирно подвешенных в хвостовой части руля, и имеющих дополнительное, обычно электромеханическое, управление от летчика. С помощью электрического переключателя летчик отклоняет триммер в сторону, противоположную отклонению руля и добивается полного уравновешивания шарнирного момента триммером. В результате будет достигнута балансировка самолета при нулевых усилиях на командных рычагах. В системах управления с необратимым бустером шарнирный момент руля полностью воспринимается этим бустером, а усилия на командных рычагах, в том числе и балансировочные, создаются специальными загрузочными механизмами. В этом случае триммеры на рулях не ставятся, а балансировочные усилия, приходящие от загрузочного механизма, снимаются специальным устройством, включенным в конструкцию загружателя. Маневренные усилия управления возникают при выполнении самолетом кратковременных маневров. Эти усилия необходимы летчику для естественного чувства управления, по ним он судит о поведении самолета, интенсивности выполняемого маневра и перегрузке. Маневренные усилия должны укладываться в строго регламентированные нормы, выработанные длительной летной практикой. Для больших по размерам самолетов, для самолетов с большой скоростью полета приходится предусматривать специальные меры по снижению маневренных усилий. Ручной режим управления ЛА При ручном управлении отклонение лётчиком органа управления (ОУ) может выполняться непосредственно (так называемое обратимое ручное управление), когда лётчик, прикладывая усилия к рычагам управления, уравновешивает полностью или частично аэродинамический шарнирный момент отклоняемого ОУ. В этом случае перемещение рычагов управления требует от лётчика непрерывной затраты энергии. Другой вид ручного управления — необратимое. Он связан с использованием для отклонения ОУ каких-либо вспомогательных устройств и источников энергии, например гидравлической или электрической системы. Гидравлический рулевой привод (бустер) в системе необратимого управления уравновешивает полностью шарнирный момент ОУ, а лётчик перемещает только золотник бустера, для чего требуется небольшое усилие (порядка 10—15 Н). Поскольку рулевой привод представляет собой систему с жёсткой обратной связью, то перемещение лётчиком рычага управления однозначно (и, как правило, линейно) связано с перемещением выходного штока бустера и, следовательно, с отклонением ОУ. Такое устройство позволяет управлять ЛА на больших скоростях и при его больших размерах. Однако для появления у лётчика необходимых ощущений изменения режима полёта (скорости, перегрузки, угловых скоростей и др.) на рычагах управления должны искусственно имитироваться соответствующие изменения усилий, строго регламентированные в соответствии с опытом лётной эксплуатации. Применяемые для этого имитаторы усилий, которые обычно называются загрузочными устройствами, имеют различные принципы действия. Они могут быть пневматическими, гидравлическими и механическими. Последний тип получил наибольшее распространение (в виде регулируемых пружин). Загрузочные устройства должны обеспечивать регулирование усилий в зависимости от параметров полёта. Управление рулем высоты Управление самолетом в продольной плоскости, помимо управляемого (переставного) стабилизатора, осуществляется рулем высоты, расположенным на задней кромке стабилизатора. РВ, например, у самолета Ил-76 отклоняется вверх на 21° и вниз на 15°. Проводка управления РВ жесткая, выполнена двумя ветвями, разнесенными по бортам. Управление РВ осуществляется с помощью двух штурвальных колонок на местах летчиков, а также с помощью двух рулевых машин (РМ) автопилота, подключенных к ветвям проводки управления РВ. Ветвь проводки от левой штурвальной колонки проложена по левому борту и присоединена к левой секции РВ, а от правой штурвальной колонки - по правому борту и присоединена к правой секции РВ. В отсеке между шпангоутами 76-78 расположены три автономные рулевые машины (АРМ), из них две АРМ установлены в левой ветви проводки, а одна АРМ - в правой. В связи с тем, что бустеры АРМ работают по необратимой схеме, имеются левое и правое загрузочные устройства (ЗУ), расположенные под полом кабины летчиков, причем каждое ЗУ создает половину требуемой загрузки штурвальных колонок. В обычных условиях работают все три АРМ. Обе ветви проводки управления РВ соединены между собой элементами жесткой связи в районе установки штурвалов, а также в районе установки АРМ (за АРМ и до АРМ). В аварийной обстановке ветви проводок управления РВ могут быть рассоединены с помощью пиромеханизмов. Положение РВ определяется по индикатору, расположенному на приборной доске левого летчика. Таким образом, принципиальная особенность самолета Ил-76 заключается в том, что система управления не является функциональной подсистемой ГС, а источником энергии является автономный гидравлический привод в виде АРМ. Рассмотрим его конструкцию подробнее. Автономная рулевая машина (APМ) является следящим гидроприводом с индивидуальным источником питания автономного типа. Рассмотрим конструкцию и работу АРМ на примере АРМ-62 самолета Ил-76. Гидропривод входит в систему управления самолетом и предназначен для перемещения основных поверхностей управления. АРМ (см.Рис.1.31) конструктивно представляет собой единый агрегат, смонтированный из блоков: -блок бака; -рулевой механизм; -насосная станция; -система рычагов и качалок и др. Распределитель с плоским поворотным золотником 9, силовой гидроцилиндр 10 и входной рычаг 1, который связан с золотником посредством тяг и качалок 2, 4, 6 и с исполнительным штоком посредством тяги 3 и двух качалок образуют бустер. Электромеханический преобразователь (поляризованное реле) 22, золотник демпфера 27, дроссели 25, сопла 23, редукционный клапан 26, цилиндр демпфера 28 и датчик обратной связи 24 образуют рулевую машину демпфера. Бустер и рулевая машина демпфера подсоединены к источнику гидропитания (насосной станции 19) параллельно и вместе с ним составляют гидропривод с замкнутой и закрытой циркуляцией гидрожидкости и дроссельным регулированием. В блок бака входят бак 12, гидрокомпенсатор 15, зарядный клапан 14, клапан стравливания 13, предохранительный клапан слива 18, приемники электротермометров сопротивления 17 и узел реле давления 20. Бак 12 является резервуаром гидросистемы АРМ. Гидрокомпенсатор 15, помещенный внутри бака, поддерживает начальное давление на входе в насосную станцию, компенсирует температурные изменения объема жидкости и сглаживает колебания давления в гидросистеме АРМ. Он представляет собой оболочку из эластичной маслостойкой резины, в которой находится сжатый азот. Предохранительный клапан слива 18 ограничивает максимальное давление жидкости в баке. Для распределения рабочей жидкости в полости гидроцилиндра служит распределитель, в состав которого входит плоский поворотный золотник 9. Золотник поворачивается в полости, образованной распределительной втулкой, опорным кольцом и опорной пятой, с помощью центральной оси. Золотник посредством центральной оси, качалки, тяги и дифференциальной качалки шарнирно соединен с входным рычагом 1, перемещения которого преобразуются в угловые повороты золотника. Основными элементами узла поляризованного реле 22 являются кронштейн, реле, рычаг, контактная колодка и вилка ШР. Рычаг служит заслонкой гидроусилителя типа сопло-заслонка и крепится на оси реле. Электромагнитное поляризованное реле преобразует ток управления в пропорциональные ему отклонения заслонки гидроусилителя демпфера. Насосная станция состоит из аксиально-плунжерного насоса переменной производительности и приводного электродвигателя переменного тока. Насос переменной производительности выполняет также функцию регулирующего элемента системы и создает такую мощность, которая требуется для преодоления шарнирного момента. Насосная станция крепится к стенке бака резьбовыми шпильками. Входной канал насоса соединяется с внутренним каналом в корпусе бака.
Лекция 3 Тема 1.4. Функциональные подсистемы управления ЛА и механизацией крыла Популярное:
|
Последнее изменение этой страницы: 2017-03-11; Просмотров: 991; Нарушение авторского права страницы