|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Цель и задачи расчетно-графической работыСтр 1 из 5Следующая ⇒
Введение
Методической целью расчетно-графической работы является приобретение и закрепление студентами практических навыков использования современного программного обеспечения для анализа и синтеза относительно простых систем на примере исследования замкнутой системы автоматического регулирования.
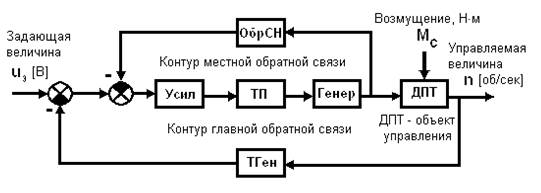
Цель и задачи расчетно-графической работы Цель работы: оптимизация типичной линейной системы автоматического регулирования (САР) с использованием программного пакета моделирования систем VisSim. Задачи работы: · анализ задания и исходных данных; · описание принципа действия САР; · построение структурно-аналитической модели САР; · оценка устойчивости и стабилизация САР; · оптимизация модели; · экспериментальное определение запасов устойчивости САР; · экспериментальное определение частотных характеристик САР; · оценка качества модели; По мере выполнения работы задачи и способы их решения могут и должны обоснованно уточняться и конкретизироваться. Например, стабилизация разомкнутого контура может потребовать изменения не одного, а нескольких параметров, оптимизация модели - не только изменения параметров, но и структуры модели. 2. Задание и исходные данные Тема расчетно-графической работы: " Анализ и оптимизация САР частоты вращения вала двигателя постоянного тока (САР ЧВ ДПТ) ". Задание: Построить модель САР, исследовать ее, оптимизировать и оценить качество полученной САР; Исходные данные: · функциональная схема САР ЧВ ДПТ; · параметры элементов САР ЧВ ДПТ. Функциональная схема САР ЧВ ДПТ приведена на рис.1.
Рис. 1. Функциональная схема САР ЧВ ДПТ: У - усилитель; ТП - тиристорный преобразователь; Г - генератор; ДПТ - двигатель постоянного тока; ТГ - тахогенератор; ОСН - гибкая обратная связь по напряжению. ДПТ – двигатель постоянного тока независимого возбуждения. ДПТ – объект управления, его выходная величина, частота вращения вала n должна соответствовать заданию. uз - напряжение задания, в соответствии с которым должна изменяться частота n вращения вала ДПТ. Мc - возмущающий момент силы, приложенный к валу ДПТ от той машины, которую он приводит в действие Параметры элементов: (N - номер варианта задания) У - усилитель моделируется апериодическим звеном с передаточной функцией:
с параметрами: ТП - тиристорный преобразователь моделируется апериодическим звеном с передаточной функцией:
с параметрами: ОСН - гибкая обратная связь по напряжению, инерционно-дифференцирующее звено:
с параметрами: ТГ - тахогенератор, усилительное (пропорциональное) звено:
где: Г - генератор, апериодическое звено:
с параметрами: ДПТ- двигатель постоянного тока, колебательное звено. Его передаточная функция по каналу управления:
а по каналу возмущения:
где:
Анализ исходных данных Выполняется с целью установления достаточности исходных данных для реализации модели и их непротиворечивости. Примечание: анализ проводится в процессе выполнения всей работы и вносится в пояснительную записку после ее окончания. Если выясняется, что каких-то данных недостаточно, студент должен обоснованно ввести их. В случае противоречивости исходных данных, необходимо найти компромиссное решение и обосновать его. Построение структурной и аналитической моделей САР Моделирование может выполняться с использованием программного пакета VisSim. Цель моделирования: обеспечить возможность анализа, а по его результатам и оптимизации САР. Определение передаточных функций элементов САР Определить значения параметров передаточных функций элементов в соответствии с номером варианта. Ввести эти значения в соответствующие блоки. Рационально разместить блоки диаграммы, предусмотреть место для надписей и комментариев. Указать что это за работа, кем и когда она выполняется, номер варианта и др. Коррекция замкнутой САР Коррекция осуществляется с целью получения работоспособной САР путем оптимизации коэффициента усиления контура управления. Если этого оказывается недостаточно, то в главный контур вводится и настраивается ПИ-регулятор. Формально, подбор наилучшего значения коэффициента усиления следует называть параметрической оптимизацией системы, в то время как введение ПИ-регулятора и определение его наилучших настроечных параметров является простым случаем структурно-параметрической оптимизации САР, поскольку во втором случае изменяется структурная схема. По ЛАЧХ и ЛФЧХ разомкнутого контура определить необходимую величину изменения коэффициента усиления в дБ, с тем, чтобы запасы устойчивости вошли в требуемые интервалы, предпочтительнее ближе к их верхним границам. По фазе это 350 ÷ 650 и по амплитуде 6 ÷ 12 ÷ 20 дБ. Изменение усиления контура следует провести путем введения П-регулятора (усилителя) непосредственно за сумматором главного контура управления. Если при этом усиление контура окажется меньше 20 дБ, следует ввести в контур главной обратной связи, сразу после П-регулятора, ПИ-регулятор с передаточной функцией:
где: · kp – коэффициент усиления ПИ-регулятора; · Ти – постоянная времени интегратора, обратно пропорциональная частоте сопряжения аппроксимаций участков ЛАЧХ с наклонами 0 дБ/дек и -20 дБ/дек соответственно. Примечание. Усиление П-регулятора можно учесть в ПИ-регуляторе, с тем, чтобы уменьшить количество блоков в схеме. После корректировки усиления или, может быть, введения ПИ-регулятора, следует заново выделить элементы разомкнутого контура, построить ЛАЧХ и ЛФЧХ и убедиться в том, что запасы по фазе и амплитуде соответствуют требованиям. Коэффициент усиления контура в астатической системе напрямую не регламентируется, а косвенно он характеризует быстродействие системы. Оценка качества САР Оценка выполняется с целью сравнения показателей качества переходного и установившегося режимов оптимизированной САР с требованиями, предъявляемыми к САР заказчиком. Оценка качества переходного режима САР осуществляется по переходной функции замкнутой САР. Замкнуть главный контур управления, переключить осциллограф на выход САР, к выходу ДПТ. Запустить на счет. Оценить время регулирования, перерегулирование. Перерегулирование хорошей системы находится в пределах 0% ÷ 20 %. Если полученное перерегулирование превышает величину 40%, следует вернуться к коррекции системы и уменьшить усиление контура. Приближенно определить по ЛАЧХ разомкнутого контура окончательно скорректированной системы коэффициенты ошибок с0, с1 и с2. Возможно определение коэффициентов ошибок и альтернативным способом, непосредственно в VisSim'е. Заключение Здесь следует кратко изложить основные результаты работы, сделать выводы и дать рекомендации. Смысл выводов - достигнута ли цель работы и решены ли ее задачи. Рекомендации могут быть как по оптимизации методов решения поставленных задач, способам и возможному дальнейшему улучшению системы, так и по ее применению. 4 Пример выполнения расчетно-графической работы
4.1 Пояснения к требованиям по составлению пояснительной записки
При работе с методическим руководством, его окно целесообразно расположить внизу, а окно программы VisSim – в верхней части экрана. Текст пояснительной записки студент должен изложить своими словами, в безличной форме. Не следует употреблять выражения «мы (или, тем более, я) сделали …», «…в нашей работе…», «..на рисунке мы видим …» и т.п. Следует писать «в работе было выполнено …», «на рисунке представлена схема …», «…получена формула …» и т.д. Следует обратить внимание на то, чтобы описание было по существу излагаемого вопроса и соответствовало названию, цели и задачам соответствующего пункта. Для этого нужно в каждом пункте ответить на главные вопросы: · зачем, · как, · почему. Ответ на вопрос зачем предполагает формулировку цели пункта, т.е. обосновывает зачем он введен, что полезного должно быть получено в результате его выполнения. Кроме того, здесь же следует поставить и задачи, которые предполагается решить для достижения цели. Вопрос как предполагает изложение того, что и каким образом выполняется в данном пункте работы. Например, как осуществляется преобразование формулы или схемы к нужному виду. Вопрос почему требует обосновать то, что поставленная задача должна решаться именно излагаемым способом. Наконец, пункт должен завершаться выводами, которые нетрудно сделать, если цель и задачи поставлены правильно. Число рисунков и подписи к ним в пояснительной записке должны быть такими, чтобы давать общее представление о работе только из просмотра рисунков. Рисунки следует подписывать так, чтобы подпись содержала три кратких раздела: · содержательное название рисунка, отражающее то, что на нем изображено; · то, на что следует обратить внимание читателя (что видно на рис.); · что из этого следует. Результаты исследований, анализа и оптимизации системы должны быть иллюстрированы следующим минимальным набором рисунков: 1. Схема исходной замкнутой САР и ее переходная характеристика. 2. Схема исходной разомкнутой САР и ее переходная характеристика. 3. Схема стабилизированной разомкнутой САР и ее переходная характеристика. 4. ЛАЧХ и ЛФЧХ стабилизированной разомкнутой САР с указанием запасов устойчивости. 5. ЛАЧХ и ЛФЧХ предварительно скорректированной статической разомкнутой САР с указанием запасов устойчивости и величины усиления на низких частотах. Здесь же построение для определения параметров ПИ-регулятора. 6. Схема оптимизированной САР с ПИ-регулятором и ее переходная характеристика с указанием времени регулирования и величины перерегулирования. 7. ЛАЧХ и ЛФЧХ оптимизированной САР с указанием запасов устойчивости. 8. Диаграмма определения коэффициентов ошибок с0 и с1 оптимизированной САР, характеризующих качество работы САР в установившемся режиме. Эти файлы должны быть представлены на диске, прилагаемом к пояснительной записке. Последовательность анализа и оптимизации САР должна быть зарегистрирована в виде диаграмм промежуточных и окончательной моделей: 1. Модель исходной замкнутой САР. 2. Модель исходной разомкнутой САР. 3. Модель стабилизированной в разомкнутом состоянии САР. 4. Модель САР, предварительно скорректированной посредством изменения коэффициента усиления контура. 5. Модель разомкнутой САР с введенным ПИ-регулятором. 6. Модель замкнутой САР с введенным ПИ-регулятором. 7. Модель с определением коэффициентов ошибок оптимизированной САР. Эти файлы должны быть представлены на диске, прилагаемом к пояснительной записке. Работа САР ЧВ ДПТ в статике В статике входные, а, следовательно, и выходные, сигналы САР постоянны. На первый, левый сумматор контура главной обратной связи, его сравнивающее устройство, подается задающая величина и величина с выхода тахогенератора, пропорциональная частоте вращения вала. Разностный сигнал e = uз – yтг = uз - kтгn, имеющий малую величину, усиливается усилителем, тиристорным преобразователем и генератором, в результате чего получается входной, управляющий сигнал ДПТ (двигателя постоянного тока, объекта управления), т.е. напряжение на якоре. Вследствие наличия этого напряжения вал двигателя вращается. Поскольку произведение коэффициентов усиления усилителя, тиристорного преобразователя и генератора велико, то получить некоторое конкретное управляющее напряжение на якоре двигателя можно только в том случае, если разностный сигнал e – мал. Это значит, что частота n вращения вала с некоторой точностью пропорциональна заданию uз. Звено обратной связи инерционно-дифференцирующее, поскольку обратная связь по напряжению гибкая, и поэтому оно не влияет на работу САР в статике. Т.о. САР выполняет свои функции: обеспечивает слежение в статике, поддерживая частоту вращения вала пропорциональной заданию. Задание параметров блоков Далее следует задать параметры отдельных блоков с тем, чтобы они соответствовали своему назначению, т.е. их передаточные функции были такими, как вычислены выше для САР. Усилитель. Щелкнуть дважды левой кнопкой или один раз правой по блоку усилителя и в появившемся окне ввести значения усиления и коэффициенты знаменателя его передаточной функции Аналогично вводятся параметры тиристорного преобразователя и генератора, поскольку они также как и усилитель моделируются апериодическими звеньями. Двигатель постоянного тока. Щелкнуть дважды по будущей модели двигателя и в диалоговом окне ввести параметры в соответствии с передаточной функцией Отметим, что коэффициенты полинома знаменателя вводятся в порядке убывания их степеней и разделяются пробелами. Звено обратной связи по напряжению (ОСН). Введение параметров имеет особенность: числитель не содержит свободного члена, о чем следует сообщить VisSim’у, явно указав нулевое значение коэффициента свободного члена Тахогенератор моделируется безинерционным усилителем, в окне свойств которого нужно установить только значение коэффициента усиления, равного в данном случае 0.02. Надписи. Напомним, что надписи выполняются с использованием блока label подменю Annotation меню Blocks. Может оказаться необходимым уменьшить время моделирования, с тем, чтобы колебания не достигали огромных величин. Для этого выбрать в главном меню VisSim: Simulate – Simulation Properties – на вкладке Range установить нужное значение параметра End. Заодно имеет смысл установить шаг интегрирования Step Size величиной 0.001. Щелкнуть по кнопке ОК. Запустить моделирование. В результате будет построена модель, схема которой приведена на рис. 4.2.
4.4 Оценка устойчивости и стабилизация разомкнутой САР. Предварительная коррекция замкнутой САР ДПТ
Вернемся к разомкнутой САР рис. 4.8. Частотные характеристики строятся именно для разомкнутого контура, а по ним можно судить об устойчивости замкнутой САР, пользуясь критерием устойчивости Найквиста. Предварительная коррекция замкнутой САР осуществляется посредством изменения и оптимизации значения коэффициента усиления разомкнутого контура. Технически этот коэффициент можно менять, установив в схеме рис. 4.8 П-регулятор (усилитель - gain) между сумматорами и меняя его усиление, а контролировать его значение - по установившемуся значению переходной функции. Изменение коэффициента усиления контура управления приводит к вертикальным смещениям ЛАЧХ и не влияет на ЛФЧХ. Оценка качества САР Понятие качество линейной САР объединяет точность ее слежения за задающим сигналом и подавления возмущений, а также быстродействие. Качество САР оценивается прямыми и (или) косвенными показателями переходного и установившегося режимов. Косвенные показатели это запасы устойчивости САР по фазе и амплитуде и порядок астатизма. Для статических систем следует назвать и коэффициент усиления контура. Существует и множество других косвенных показателей качества. Прямые показатели качества разделяются на показатели переходного режима – это время регулирования tpег и перерегулирование σ %, и показатели установившегося режима: коэффициенты ошибок по положению с0, по скорости с1 и по ускорению с2. Введение
Методической целью расчетно-графической работы является приобретение и закрепление студентами практических навыков использования современного программного обеспечения для анализа и синтеза относительно простых систем на примере исследования замкнутой системы автоматического регулирования.
Цель и задачи расчетно-графической работы Цель работы: оптимизация типичной линейной системы автоматического регулирования (САР) с использованием программного пакета моделирования систем VisSim. Задачи работы: · анализ задания и исходных данных; · описание принципа действия САР; · построение структурно-аналитической модели САР; · оценка устойчивости и стабилизация САР; · оптимизация модели; · экспериментальное определение запасов устойчивости САР; · экспериментальное определение частотных характеристик САР; · оценка качества модели; По мере выполнения работы задачи и способы их решения могут и должны обоснованно уточняться и конкретизироваться. Например, стабилизация разомкнутого контура может потребовать изменения не одного, а нескольких параметров, оптимизация модели - не только изменения параметров, но и структуры модели. 2. Задание и исходные данные Тема расчетно-графической работы: " Анализ и оптимизация САР частоты вращения вала двигателя постоянного тока (САР ЧВ ДПТ) ". Задание: Построить модель САР, исследовать ее, оптимизировать и оценить качество полученной САР; Исходные данные: · функциональная схема САР ЧВ ДПТ; · параметры элементов САР ЧВ ДПТ. Функциональная схема САР ЧВ ДПТ приведена на рис.1.
Рис. 1. Функциональная схема САР ЧВ ДПТ: У - усилитель; ТП - тиристорный преобразователь; Г - генератор; ДПТ - двигатель постоянного тока; ТГ - тахогенератор; ОСН - гибкая обратная связь по напряжению. ДПТ – двигатель постоянного тока независимого возбуждения. ДПТ – объект управления, его выходная величина, частота вращения вала n должна соответствовать заданию. uз - напряжение задания, в соответствии с которым должна изменяться частота n вращения вала ДПТ. Мc - возмущающий момент силы, приложенный к валу ДПТ от той машины, которую он приводит в действие Параметры элементов: (N - номер варианта задания) У - усилитель моделируется апериодическим звеном с передаточной функцией:
с параметрами: ТП - тиристорный преобразователь моделируется апериодическим звеном с передаточной функцией:
с параметрами: ОСН - гибкая обратная связь по напряжению, инерционно-дифференцирующее звено:
с параметрами: ТГ - тахогенератор, усилительное (пропорциональное) звено:
где: Г - генератор, апериодическое звено:
с параметрами: ДПТ- двигатель постоянного тока, колебательное звено. Его передаточная функция по каналу управления:
а по каналу возмущения:
где:
Популярное:
|
Последнее изменение этой страницы: 2017-03-11; Просмотров: 586; Нарушение авторского права страницы