|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Обобщенный состав системы управления.
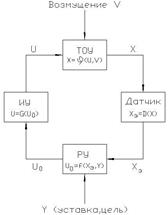
Как известно, любая система управления включает в себя четыре основных компонента: решающее устройство (РУ), датчики (Д), исполнительные устройства (ИУ) и технологический объект управления (ТОУ), соединенные между собой в соответствии с принципом обратной связи (см. рис.50). Функция U0 = f(хэ, Y), реализуемая РУ для оптимального (в некотором смысле) поддержания состояния Х ( управляемые параметры ) ТОУ в соответствии с уставкой Y (целью), называется законом управления, а функция х = φ (U, V), связывающая отклик ТОУ на управляющее воздействие ( управляющие параметры ) U - моделью ТОУ. Датчики регистрируют и преобразуют управляемые параметры X в сигналы Хэ, воспринимаемые РУ, где D(x) - калибровочная функция (модель датчика). ИУ выполняют " обратные" по отношению к датчикам действия, т.е. преобразуют управляющие сигналы U0 РУ во входные воздействия U на ТОУ, изменяющие его состояние.
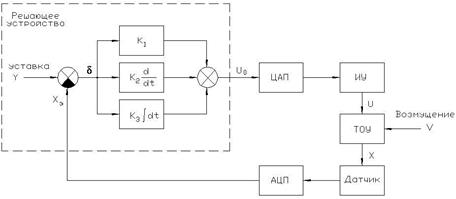
Установлено, что в большинстве практических случаев в качестве f(x) может быть выбрана аддитивная пропорционально-интегрально-дифференциальная функция ( ПИД-закон )
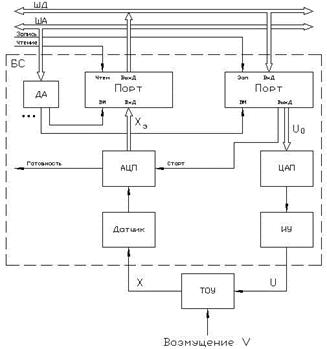
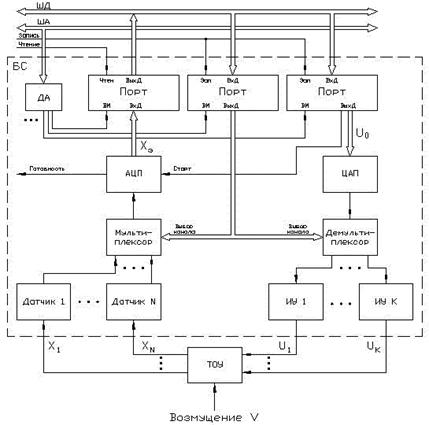
где d = Y - хэ - отклонение от уставки Y (ошибка); ki – коэффициенты пропорциональности. Значения коэффициентов определяются методом оптимизации из целевой функции и уравнения, описывающего контур управления. Таким образом, для построения МПС управления ТОУ необходимо определить математическую модель ТОУ, целевую функцию управления, выбрать датчик и ИУ с подходящими функциями преобразования, построить закон управления и реализовать его в программе МПС. Подключение технологического объекта управления к базовой МПС. Если функция решающего устройства реализует ПИД-закон по формуле (3), тогда система управления представима в виде, показанном на рисунке 51, где Ä - оператор суммирования, а закрашенный сектор - вычитание. В этом случае функции решающего устройства могут быть возложены на МПС. Учитывая, что входы-выходы ИУ и датчиков имеют аналоговую природу и для их сопряжения с МПС требуются АЦП и ЦАП, можно включить МП в контур управления так, как показано на рисунке 52 (однопараметрический случай, то есть с одним управляющим и одним управляемым параметрами). Для случая многопараметрического ТОУ существует два пути реализации контура управления на основе МПС. 1. На каждый контролируемый (управляемый) и управляющий параметры использовать свой контур, состоящий из датчика, АЦП, ЦАП и исполнительного устройства. Этот вариант характеризуется значительными аппаратными затратами, но, соответственно, и быстрой реакцией на изменения состояния объекта управления. 2. Мультиплексирование управляемых и управляющих параметров одним контуром " АЦП-МПС-ЦАП". В этом случае аппаратные затраты минимизируются, однако при этом увеличивается время реакции системы на меняющееся поведение объекта управления. Этот вариант подключения приведен на рисунке 53.
Режимы работы системы управления. Любая система автоматического управления имеет несколько режимов работы: · запуск – перевод системы в нормальный режим при включении системы; · нормальные режимы – реализация системой управления штатных задач своего функционирования; · аварийный режим – поведение системы управления в аварийных ситуациях; · выключение - перевод системы из нормального режима в состояние, при котором возможно ее отключение; · переход из режима в режим - перевод системы из одного нормального режима в другой. Поэтому разработка МПС должна включать создание соответствующих программных и аппаратных средств для каждого из этих режимов. Так как авария наносит серьезный (и даже недопустимый) ущерб, большое внимание должно уделяться разработке методов обнаружения предаварийного состояния и алгоритмов вывода системы из него. Управление ТОУ обычно осуществляется в реальном масштабе времени, поэтому необходимо серьезно отнестись к анализу быстродействия МПС. Особенности многопроцессорных систем. Популярное:
|
Последнее изменение этой страницы: 2017-03-11; Просмотров: 559; Нарушение авторского права страницы
 , (3)
, (3)