
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Механическое движение. Система отсчета, системы координат. Перемещение, траектория, путь. Скорость. Ускорение.Стр 1 из 16Следующая ⇒
Механическое движение. Система отсчета, системы координат. Перемещение, траектория, путь. Скорость. Ускорение.
Механическим движением называется изменение взаимного положения тел в пространстве с течением времени. Материальной точкой называют абстрактное тело, имеющее массу, но лишенное линейных размеров. Система отсчета – это совокупность системы координат, тела, принятого за начало отсчета, и прибора для измерения времени.
Если точка движется в одной плоскости, то ее положение можно определить в плоской системе координат XOY векторным или координатным способами. Траектория материальной точки – это непрерывная линия, которую она описывает в пространстве в процессе своего движения. Путь – это длина траектории от начального положения тела до конечного. Путь – величина скалярная и всегда положительная. Перемещение тела – вектор, соединяющий начальное и конечное положение тела и направленный к конечному положению. Скорость – отношение перемещения тела ко времени, за которое перемещение произошло. Скорость равна пути, пройденному за единицу времени. Ускорение – это величина, равная отношению изменения скорости ко времени. за которое это изменение произошло. Ускорение равно изменению скорости тела за единицу времени. Прямолинейное и криволинейное движение. Кинематика вращательного движения. Кинематические уравнения движения.
Прямолинейное движение – это движение, траектория которого есть прямая линия. Криволинейное движение – это движение, траектория которого представляет собой кривую линию. Кинематика вращательного движения — раздел кинематики, изучающий математическое описание движения материальных точек. Основной задачей кинематики является описание движения при помощи математического аппарата без выяснения причин, вызывающих это движение. Вращательным называется движение, при котором все точки тела движутся по окружностям, центры которых лежат на одной прямой – оси вращения. При движении материальной точки М ее координаты Поэтому для задания закона движения м.т. необходимо указать либо вид функциональной зависимости всех трех ее координат от времени:
либо зависимость от времени радиус-вектора этой точки
Три скалярных уравнения (1.2) или эквивалентное им одно векторное уравнение (1.3) называются кинематическими уравнениями движения материальной точки.
Классическая динамика частиц. Понятие состояния частицы в классической механике. Основная задача динамики. Динамика — раздел механики, в котором изучаются причины возникновения механического движения. Динамика оперирует такими понятиями, как масса, сила, импульс, энергия. Динамика, базирующаяся на законах Ньютона, называется классической динамикой. Эти методы перестают быть справедливыми для движения объектов очень малых размеров (элементарные частицы) и при движениях со скоростями, близкими к скорости света. Такие движения подчиняются другим законам. В классической механике всякая частица движется по определенной траектории, так что в любой момент времени точно фиксированы ее координаты и импульс. Основная задача динамики
Первый закон Ньютона. Понятие инерциальной системы отсчета.
· 1-й: Существуют такие системы отсчета, относительно которых поступательно движущееся тело сохраняет свою скорость постоянной, если на него не действуют другие тела или их действие скомпенсировано.
Инерциальные системы отсчета – это системы, относительно которых материальная точка при отсутствии на нее внешних воздействий или их взаимной компенсации покоится или движется равномерно и прямолинейно.
Единицы измерения Момент силы измеряется в ньютон-метрах. 1 Н·м — момент силы, который производит сила 1 Н на рычаг длиной 1 м. Сила приложена к концу рычага и направлена перпендикулярно ему. Измерение момента На сегодняшний день измерение момента силы осуществляется с помощью тензометрических, оптических и индуктивных датчиков нагрузки. В России при решении задач измерения момента в основном используется оборудование зарубежных производителей
Момент импульса относительно некоторой точки — это векторное произведение силы на кратчайшее расстояние от этой точки до линии действия силы. Характеризует количество вращательного движения. Величина, зависящая от того, сколько массы вращается, как она распределена относительно оси вращения и с какой скоростью происходит вращение. Определяется момент силы векторным произведением её радиус-вектора иимпульса:
где Для нескольких частиц момент импульса определяется как (векторная) сумма таких членов:
где (В пределе количество частиц может быть бесконечным, например, в случае твердого тела с непрерывно распределенной массой или вообще распределенной системы это может быть записано как В системе СИ момент импульса измеряется в единицах джоуль-секунда; Дж·с. Из определения момента импульса следует его аддитивность: как, для системы частиц в частности, так и для системы, состоящей из нескольких подсистем, выполняется:
Замечание: в принципе момент импульса может быть вычислен относительно любого начала отсчета (получившиеся при этом разные значения связаны очевидным образом); однако чаще всего (для удобства и определенности) его вычисляют относительно центра масс или закрепленной точки вращения твердого тела итп).
Вычисление момента импульса Так как момент импульса определяется векторным произведением, он является псевдовектором, перпендикулярным обоим векторам
где Запишем
Закон сохранения момента импульса формулируется так: момент импульса замкнутой системы тел относительно любой неподвижной точки не изменяется с течением времени. Это один из фундаментальных законов природы. Для замкнутой системы тел момент внешних сил всегда равен нулю, так как внешние силы вообще не действуют на замкнутую систему.
Аналогично для замкнутой системы тел, вращающихся вокруг оси z:
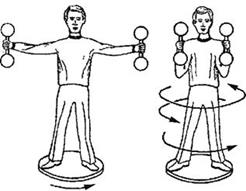
Если момент внешних сил относительно неподвижной оси вращения тождественно равен нулю, то момент импульса относительно этой оси не изменяется в процессе движения. Именно закон сохранения момента импульса используется танцорами на льду для изменения скорости вращения. Или еще известный пример – скамья Жуковского.(см. рисунок).
Закон в упрощенном виде: 20. Движение в центральном поле сил. Задача двух тел. Центральным называют такое силовое поле, в котором потенциальная энергия частицы является функцией только от расстояния r до определенной точки - центра поля: U=U(r). Сила, действующая на частицу в таком поле, тоже зависит лишь от расстояния r и направлена в каждой точке пространства вдоль радиуса, проведенного в эту точку из центра поля. Одномерное движение Движение будем называть одномерным, если положение механической системы (частицы), определяется с помощью одного параметра. В качестве такого параметра могут выступать координата, угол поворота и др. Данный параметр будем обозначать Кинетическая энергия в данном случае имеет вид -
где
Если потенциальная энергия явно не зависит от времени, то
Движение возможно, если Используя определение кинетической энергии (5.1), равенство в (5.3) можно записать так:
Отсюда получаем уравнение движения частицы в дифференциальной форме:
Конкретный закон движения
5.2 Задача двух тел Задачей двух тел называется задача о движении двух частиц, составляющих замкнутую систему. Считаем, что частицы взаимодействуют между собой посредством потенциальных стационарных сил. Внутренние силы не влияют на движение центра инерции системы; центр инерции системы движется прямолинейно и равномерно либо покоится. В дальнейшем движение частиц будем рассматривать в системе центра инерции (рис.5.2).
Рис. 5.2
Используя третий закон Ньютона, согласно которому
где
находим законы движения частиц системы. Из (5.9) следует, что траектории движения изображающей точки и частиц системы являются подобными.
Рассмотрим движение частицы под действием центральной силы
Сила (5.10) может быть записана через потенциальную энергию частицы:
Потенциальная энергия частицы не зависит явным образом от времени. Это означает, что механическая энергия частицы сохраняется (первый интеграл движения):
При движении частицы под действием силы (5.10) сохраняется орбитальный момент (второй интеграл движения):
Из этого закона сохранения следует, что движение частицы происходит в некоторой плоскости, траекторией движения является плоская кривая (обобщение первого закона Кеплера). Из (5.13) вытекает, что секторная скорость движения частицы постоянна (второй закон Кеплера):
Т.к. движение частицы является плоским, то для его описания целесообразно перейти в полярную систему координат (рис. 5.3). Скорость частицы в полярной системе координат записывается следующим образом:
где
С учетом формул (5.15) и (5.16) интегралы движения частицы в полярной системе координат имеют вид
Раскрыв скобки в формуле (5.17), можно записать
где
- эффективный потенциал. Эффективный потенциал может быть положительным, отрицательным и равным нулю. Первое слагаемое в (5.19) представляет собой кинетическую энергию радиального движения частицы, первое слагаемое в (5.20) – кинетическую энергию обращения частицы вокруг силового центра. Из уравнения (5.19) получаем
- дифференциальное уравнение радиального движения частицы. Интегрируем (5.21) и находим зависимость расстояния частицы до силового центра как функцию времени (закон радиального движения частицы):
Интегрируя последнее уравнение, получим закон изменения угла поворота частицы вокруг силового центра:
Интегрируя (5.23), найдем уравнение траектории частицы: Траектория движения частицы в центральном поле есть плоская кривая. Она симметрична относительно прямой, проходящей через силовой центр и ближайшую (наиболее удаленную) точку траектории к силовому центру, если такая имеется (на это указывают знаки
Формулы (5.21-5.23) позволяют полностью решить задачу о движении частицы в центрально-симметричном поле, если известна сила, действующая на частицу, или потенциальная энергия частицы в данном силовом поле. Часто требуется решить обратную задачу: по известной траектории движения частицы в центральном поле найти силу, действующую на частицу. В этом случае удобно пользоваться уравнением Бине, которое мы сейчас получим. Запишем формулу для ускорения частицы в полярной системе координат:
При движении частицы в центральном поле ускорение частицы направлено вдоль радиус-вектора частицы (по направлению действующей силы). Поэтому составляющая ускорения
Производная
Чтобы найти силу по формуле (5.25) необходимо вычислить
и далее находим
Подставив формулы (5.26) и (5.27) в формулу (5.25), проведя алгебраические преобразования, получим уравнение Бине
Данное дифференциальное уравнение может служить для нахождения траектории движения частицы по заданной силе или для нахождения силы, действующей на частицу, по заданной траектории движения. Пример 5.1. Траектория частицы в центральном поле имеет вид: Находим:
Подставив последнюю формулу в (5.28), найдем силу:
21.Неинерциальные системы отсчета. Силы инерции Как известно, законы Ньютона выполняются только в инерциальных системах отсчета. Системы отсчета, которые движутся относительно инерциальной системы с ускорением, называются неинерциальными. В неинерциальных системах законы Ньютона, вообще говоря, уже применять нельзя. Однако законы динамики можно применять и для них, если кроме сил, которые обусловленны воздействием тел друг на друга, ввести в рассмотрение понятие силы особого рода - так называемую силу инерции.
Так как F =m a ( a - ускорение тела в инерциальной системе отсчета), то
Силы инерции обусловлены ускоренным движением системы отсчета относительно измеряемой системы, поэтому в общем случае следует учитывать следующие случаи возниконовения этих сил: 1) силы инерции при ускоренном поступательном движении системы отсчета; 2) силы инерции, которые действуют на тело, покоящееся во вращающейся системе отсчета; 3) силы инерции, которые действуют на тело, движущееся во вращающейся системе отсчета. 1. Силы инерции при ускоренном поступательном движении системы отсчета. На тележке к штативу на нити подвешен шарик массой m (рис. 1). Пока тележка покоится или движется прямолинейно и равномерно, нить, которая удерживает шарик, занимает вертикальное положение и сила тяжести Р уравновешивается силой реакции (натяжения) нити Т.
Если тележку привести в поступательное движение с ускорением а 0, то нить будет отклоняться от вертикали в сторону, обратную движению, до такого угла α, пока результирующая сила F = P + T не даст ускорение шарика, равное а 0. Значит, результирующая сила F направлена в сторону ускорения тележки а 0 и для установившегося движения шарика (теперь шарик движется вместе с тележкой с ускорением а 0) равна F=mgtgα =ma0, откуда
2. Силы инерции, действующие на тело, покоящееся во вращающейся системе отсчета. Пусть диск равномерно вращается с угловой скоростью ω (ω =const) вокруг перпендикулярной ему оси, которая проходит через его центр. На диске установлены маятники, на разных расстояниях от оси вращения и на нитях висят шарики массой m. Когда диск начнет вращаться, шарики отклоняются от вертикали на некоторый угол (рис. 2). В инерциальной системе отсчета, которая связана, например, с помещением, где установлен диск, происходит равномерное вращение шарика по окружности радиусом R (расстояние от центра вращающегося шарика до оси вращения). Значит, на него действует сила, равная F=mω 2R и которая направлена перпендикулярно оси вращения диска. Она является равнодействующей силы тяжести Р и силы реакции (натяжения) нити Т: F = P + T. Когда движение шарика установится, то F=mgtgα =mω 2R, откуда
т. е. углы отклонения нитей маятников будут тем больше, чем больше угловая скорость вращения & omega и чем больше расстояние R от центра шарика до оси вращения диска;.
На практике действие центробежных сил инерции испытывают, например, пассажиры в движущемся автобусе на поворотах, летчики при выполнении фигур высшего пилотажа; центробежные силы инерции используются во всех центробежных механизмах: насосах, сепараторах и т. д., где они достигают очень больших значений. При проектировании быстро вращающихся деталей машин (винтов самолетов, роторов и т. д.) используются специальные механизмы для уравновешивания центробежных сил инерции. 3. Силы инерции, действующие на тело, движущееся во вращающейся системе отсчета. Пусть шарик массой m движется с постоянной скоростью ν ' вдоль радиуса равномерно вращающегося диска (ν '=const, ω =const, ν перпендикулярно ω ). Если диск не начал вращаться, то шарик, движется по радиальной прямой и попадает в точку А, если же диск привести во вращение в направлении, которое указанно стрелкой, то шарик покатится по кривой OВ (рис. 3а), причем его скорость ν ' относительно диска сменит свое направление. Это возможно лишь в случае, если на шарик действует сила, которая перпендикулярна скорости ν '.
Чтобы заставить шарик катиться по вращающемуся диску вдоль радиуса, будем использовать жестко укрепленный вдоль радиуса диска стержень, на котором шарик движется без трения прямолинейно равномерно со скоростью ν ' (рис. 3б). При отклонении шарика стержень действует на него с некоторой силой F. Во вращающейся системы отсчета, т.е. относительно диска, шарик движется прямолинейно и раномерно, что объясняется тем, что сила F уравновешивается приложенной к шарику силой инерции F k, которая перпендикулярной скорости ν '. Эта сила называется кориолисовой силой инерции. Вектор F k перпендикулярен векторам скорости v ' тела и угловой скорости вращения системы отсчета в соответствии с правилом правого винта.
31. Специальная теория относительности. Преобразование Лоренца. Интервал. Границы применимости ньютоновской механики. Специальная теория относительности — теория, описывающая движение, законы механики и пространственно-временные отношения при произвольных скоростях движения, меньших скорости света в вакууме, в том числе близких к скорости света. В рамках специальной теории относительности классическая механика Ньютона является приближением низких скоростей. Обобщение СТО для гравитационных полей называется общей теорией относительности. Описываемые специальной теорией относительности отклонения в протекании физических процессов от предсказаний классической механики называют релятивистскими эффектами, а скорости, при которых такие эффекты становятся существенными, — релятивистскими скоростями. Преобразования Лоренца: Пусть координатные оси двух инерциальных систем отсчёта S и S' параллельны друг другу, (t, x, y, z) — время и координаты некоторого события, наблюдаемого относительно системы S, а (t', x', y', z') — время и координатытого же события относительно системы S'. Если система S' движется равномерно и прямолинейно со скоростью v относительно S, то справедливы преобразования Лоренца:
где
Подобный предельный переход является отражением принципа соответствия, согласно которому более общая теория (СТО) имеет своим предельным случаем менее общую теорию (в данном случае — классическую механику). |
Последнее изменение этой страницы: 2017-03-14; Просмотров: 3374; Нарушение авторского права страницы
 и радиус-вектор
и радиус-вектор  изменяются с течением времени t.
изменяются с течением времени t.


 — радиус-вектор частицы относительно выбранного неподвижного в данной системе отсчёта начала отсчёта,
— радиус-вектор частицы относительно выбранного неподвижного в данной системе отсчёта начала отсчёта,  — импульс частицы.
— импульс частицы.
 — радиус-вектор и импульс каждой частицы, входящей в систему, момент импульса которой определяется.
— радиус-вектор и импульс каждой частицы, входящей в систему, момент импульса которой определяется. где
где  — импульс бесконечно малого точечного элемента системы).
— импульс бесконечно малого точечного элемента системы). .
.
 — угол между
— угол между  , где
, где  — составляющая радиус-вектора, параллельная вектору импульса, а
— составляющая радиус-вектора, параллельная вектору импульса, а  — аналогично, перпендикулярная ему.
— аналогично, перпендикулярная ему.  и перпендикулярную ему
и перпендикулярную ему  . Теперь, используя линейность векторного произведения, а также свойство, согласно которому произведение параллельных векторов равно нулю, можно получить ещё два выражения для
. Теперь, используя линейность векторного произведения, а также свойство, согласно которому произведение параллельных векторов равно нулю, можно получить ещё два выражения для  .
.
 , то есть
, то есть  или
или 
 отсюда
отсюда  или
или  .
.
 , если система находится в равновесии.
, если система находится в равновесии. .
. , (5.1)
, (5.1) - коэффициент инерции (в случае, если параметром является координата – масса), потенциальная энергия есть функция параметра и времени -
- коэффициент инерции (в случае, если параметром является координата – масса), потенциальная энергия есть функция параметра и времени -  . Согласно теореме об изменении механической энергии
. Согласно теореме об изменении механической энергии  :
:  (5.2)
(5.2) и механическая энергия сохраняется. Т.к. кинетическая энергия не отрицательна, то
и механическая энергия сохраняется. Т.к. кинетическая энергия не отрицательна, то . (5.3)
. (5.3) Данное неравенство накладывает ограничения на допустимую область движения. Пусть функция
Данное неравенство накладывает ограничения на допустимую область движения. Пусть функция  имеет вид, показанный на рис.5.1, механическая энергия системы
имеет вид, показанный на рис.5.1, механическая энергия системы  .
. . Если
. Если  , движение ограничено в пространстве и называется финитным. Если частица может уйти на бесконечность движение называется инфинитным. Движение невозможно, если
, движение ограничено в пространстве и называется финитным. Если частица может уйти на бесконечность движение называется инфинитным. Движение невозможно, если  .
. . (5.4)
. (5.4) . (5.5)
. (5.5) определяется видом функции потенциальной энергии
определяется видом функции потенциальной энергии  . Период одномерного финитного периодического движения определяется по формуле
. Период одномерного финитного периодического движения определяется по формуле . (5.6)
. (5.6)



 С
С 
 . (5.7)
. (5.7) , и
, и  , получим, что два уравнения системы (5.7) эквивалентны одному уравнению
, получим, что два уравнения системы (5.7) эквивалентны одному уравнению , (5.8)
, (5.8) - приведенная масса системы. Таким образом, задача двух тел сводится к задаче о нахождении закона движения изображающей точки с приведенной массой системы в поле центральной силы. Решая уравнение (5.8), находим закон движения изображающей точки
- приведенная масса системы. Таким образом, задача двух тел сводится к задаче о нахождении закона движения изображающей точки с приведенной массой системы в поле центральной силы. Решая уравнение (5.8), находим закон движения изображающей точки  . Далее по формулам
. Далее по формулам (5.9)
(5.9) . (5.10)
. (5.10) . (5.11)
. (5.11) . (5.12)
. (5.12) . (5.13)
. (5.13) . (5.14)
. (5.14) , (5.15)
, (5.15) - орты полярной системы координат. Орбитальный момент частицы в полярной системе координат записывается так:
- орты полярной системы координат. Орбитальный момент частицы в полярной системе координат записывается так:  . (5.16)
. (5.16) , (5.17)
, (5.17) . (5.18)
. (5.18)








 , (5.19)
, (5.19) (5.20)
(5.20) (5.21)
(5.21) . Далее из (5.18) находим
. Далее из (5.18) находим . (5.22)
. (5.22) . Разделив уравнение (5.22) на (5.21), найдем дифференциальное уравнение траектории движения частицы:
. Разделив уравнение (5.22) на (5.21), найдем дифференциальное уравнение траектории движения частицы:  . (5.23)
. (5.23) . Таким образом, задача о движении частицы в центральном поле полностью решена.
. Таким образом, задача о движении частицы в центральном поле полностью решена. в формуле (5.23)).
в формуле (5.23)). . (5.24)
. (5.24) равна нулю. Второй закон Ньютона для частицы в центральном поле, следовательно, можно представить в виде
равна нулю. Второй закон Ньютона для частицы в центральном поле, следовательно, можно представить в виде . (5.25)
. (5.25) . (5.26)
. (5.26) . Для этого вычисляем
. Для этого вычисляем
 . (5.27)
. (5.27) . (5.28)
. (5.28) . Найти силу
. Найти силу  , действующую на частицу.
, действующую на частицу. .
. , где
, где  - интеграл движения.
- интеграл движения. (1)
(1)
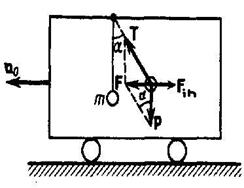 РИС 1.
РИС 1. 
 (2)
(2) 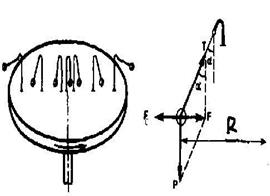 РИС 2.
РИС 2. 
 (3)
(3)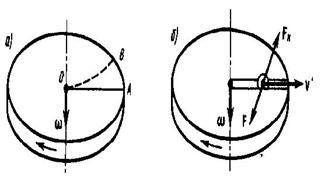 РИС 3.
РИС 3. 
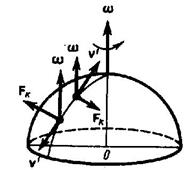 РИС 4.
РИС 4.  где силы инерции задаются формулами (2) - (4). Еще раз подчеркнем, что силы инерции вызываются не взаимодействием тел, а ускоренным движением системы отсчета. По этой причине они не подчиняются третьему закону Ньютона, так как если на тело действует сила инерции, то не существует силы, противодействующей ей и приложенной к данному телу. Два основных положения механики, по которым ускорение всегда вызывается силой, а сила всегда обусловлена взаимодействием между телами, в системах отсчета, движущихся с ускорением, одновременно не выполняются. Для любого из тел, которые находятся в неинерциальной системе отсчета, силы инерции являются внешними; Значит, здесь нет замкнутых систем, т.е. в неинерциальных системах отсчета не выполняются также и законы сохранения импульса, энергии и момента импульса. Значит, силы инерции действуют только в неинерциальных системах отсчета. В инерциальных системах отсчета таких сил не существует. Возникает вопрос о реальном или фиктивном существовании сил инерции. В ньютоновской механике, в которой сила является результатом взаимодействия тел, на силы инерции можно смотреть как на не существующие в инерциальных системах отсчета илификтивные. Однако возможна и другая их интерпретация. Поскольку взаимодействия тел осуществляются посредством силовых полей, то силы инерции рассматриваются как воздействия, которым подвергаются тела со стороны каких-то реальных силовых полей, и тогда их можно считать реальными. Независимо рассмотрения сил инерции в качестве реальных или фиктивных, многие явления, упоминающиеся в настоящем параграфе, объясняются с помощью сил инерции. Силы инерции, которые действуют на тела в неинерциальной системе отсчета, пропорциональны их массам и при прочих равных условиях сообщают этим телам одинаковые ускорения. Значит в поле сил инерции эти тела движутся абсолютно одинаково, если только одинаковы начальные условия. Тем же свойством обладают тела, которые находятся под действием сил поля тяготения. Возможны условия, при которых силы инерции и силы тяготения невозможно различить. Например, движение тел в равноускоренном лифте происходит точно так же, как и в неподвижном лифте, висящем в однородном поле тяжести. Никакой эксперимент, выполненный внутри лифта, не может отделить однородное поле сил инерции от однородного поля тяготения. Аналогия между силами тяготения и силами инерции лежит в основе принципа эквивалентности сил инерции и гравитационных сил (принципа эквивалентности Эйнштейна): все физические явления в поле тяготения происходят так же, как и в соответствующем поле сил инерции, если напряженности обоих полей в соответствующих точках пространства совпадают, а остальные начальные условия для рассматриваемых тел одинаковы. Этот принцип является основой общей теории относительности.
где силы инерции задаются формулами (2) - (4). Еще раз подчеркнем, что силы инерции вызываются не взаимодействием тел, а ускоренным движением системы отсчета. По этой причине они не подчиняются третьему закону Ньютона, так как если на тело действует сила инерции, то не существует силы, противодействующей ей и приложенной к данному телу. Два основных положения механики, по которым ускорение всегда вызывается силой, а сила всегда обусловлена взаимодействием между телами, в системах отсчета, движущихся с ускорением, одновременно не выполняются. Для любого из тел, которые находятся в неинерциальной системе отсчета, силы инерции являются внешними; Значит, здесь нет замкнутых систем, т.е. в неинерциальных системах отсчета не выполняются также и законы сохранения импульса, энергии и момента импульса. Значит, силы инерции действуют только в неинерциальных системах отсчета. В инерциальных системах отсчета таких сил не существует. Возникает вопрос о реальном или фиктивном существовании сил инерции. В ньютоновской механике, в которой сила является результатом взаимодействия тел, на силы инерции можно смотреть как на не существующие в инерциальных системах отсчета илификтивные. Однако возможна и другая их интерпретация. Поскольку взаимодействия тел осуществляются посредством силовых полей, то силы инерции рассматриваются как воздействия, которым подвергаются тела со стороны каких-то реальных силовых полей, и тогда их можно считать реальными. Независимо рассмотрения сил инерции в качестве реальных или фиктивных, многие явления, упоминающиеся в настоящем параграфе, объясняются с помощью сил инерции. Силы инерции, которые действуют на тела в неинерциальной системе отсчета, пропорциональны их массам и при прочих равных условиях сообщают этим телам одинаковые ускорения. Значит в поле сил инерции эти тела движутся абсолютно одинаково, если только одинаковы начальные условия. Тем же свойством обладают тела, которые находятся под действием сил поля тяготения. Возможны условия, при которых силы инерции и силы тяготения невозможно различить. Например, движение тел в равноускоренном лифте происходит точно так же, как и в неподвижном лифте, висящем в однородном поле тяжести. Никакой эксперимент, выполненный внутри лифта, не может отделить однородное поле сил инерции от однородного поля тяготения. Аналогия между силами тяготения и силами инерции лежит в основе принципа эквивалентности сил инерции и гравитационных сил (принципа эквивалентности Эйнштейна): все физические явления в поле тяготения происходят так же, как и в соответствующем поле сил инерции, если напряженности обоих полей в соответствующих точках пространства совпадают, а остальные начальные условия для рассматриваемых тел одинаковы. Этот принцип является основой общей теории относительности.

 - скорость света. При скоростях много меньше скорости света (
- скорость света. При скоростях много меньше скорости света (  ) преобразования Лоренца переходят в преобразования Галилея:
) преобразования Лоренца переходят в преобразования Галилея: 