|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
СИСТЕМЫ АВТОМАТИЗАЦИИ ХИМИКО-ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВСтр 1 из 13Следующая ⇒
СИСТЕМЫ АВТОМАТИЗАЦИИ ХИМИКО-ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ УЧЕБНО-МЕТОДИЧЕСКОЕ ПОСОБИЕ
по курсу: «Системы управления химико-технологическими процессами» для студентов, обучающихся по направлениям: «Химическая технология» и «Материаловедение и технологии материалов»
МОСКВА МИТХТ 2016 УДК: 66.012-52 ББК: 6П7.1 Подготовлено на кафедре «Автоматики, Электротехники и Электроники им. А.В. Нетушила»
Рецензенты:
Науменко Э.В. Системы автоматизации химико-технологических процессов: учебное пособие/ Э.В. Науменко. – М.: МТУ МИТХТ, 2016
Данное учебно-методическое пособие предназначено для студентов 3курса бакалавриата, изучающих дисциплину «Системы управления химико-технологическими процессами». Представляет собой дополненный и переработанный в соответствии с новыми требованиями и стандартами конспект лекций, опирающийся на современную учебную литературу по данной дисциплине.
©Науменко Э.В, 2016 ХИМИКО-ТЕХНОЛОГИЧЕСКИЕ ПРОЦЕССЫ И СИСТЕМЫ АВТОМАТИЗАЦИИ. Исторический путь развития автоматики Со времён глубокой древности человечество занималось созданием автоматических устройств, предназначенных для облегчения быта, защиты от окружающих опасностей и развлечений. Ещё Герон Александрийский в одной из первых книг по технике описал устройство, в котором исполнялись различные действия автоматами - куклами. На рубеже нашей эры арабы снабдили водяные часы поплавковым регулятором уровня. В средние века в России был сконструирован автомат в виде фигуры Петра I, встававшей с трона при входе кого-нибудь в комнату. В 1675 г. Гюйгенс встроил в механические часы маятниковый регулятор хода. В это же время применяются центробежные маятниковые уравнители хода водяных мельниц. Быстрое развитие автоматики началось в эпоху первой промышленной революции в Европе на рубеже XVIII и XIX веков. В России в г. Барнауле Ползуновым И.И. в 1765 г. сконструирован первый промышленный регулятор – автоматический поплавковый регулятор питания котла паровой машины. Английский механик Д. Уатт в 1784 г. получил патент на центробежный регулятор скорости паровой машины. Тем самым был открыт фундаментальный принцип управления – принцип обратной связи (принцип Ползунова-Уатта). В 1868 г. английский физик Д. Максвелл в работе “О регуляторах” впервые поставил и рассмотрел математическую задачу об устойчивости систем регулирования, где рассмотрены переход к исследованию малых отклонений и линеаризация дифференциальных уравнений, совместное рассмотрение уравнений регулятора и машины, формулировка условий устойчивости линейных систем третьего порядка и постановка перед математиками задачи о нахождении условий устойчивости для уравнений произвольного порядка, в результате чего, появилась работа Рауса (критерий Рауса). В 1876 г. в трудах Парижской академии И.А. Вышнеградский опубликовал статьи “Об общей теории регуляторов” и “О регуляторах прямого действия”. В этих работах содержались не только основные этапы работы Максвелла: системный подход, линеаризация, исследование устойчивости, но и делался существенный шаг вперёд при рассмотрении основных показателей качества процесса регулирования: монотонность, колебательность, апериодичность. Работами И.А. Вышнеградского было вскрыто и объяснено знаменитое противоречие между точностью и устойчивостью регулирования: при уменьшении статической ошибки регулирования ниже некоторого критического значения система теряет устойчивость. Дальнейшее развитие техники регулирования пошло по пути поиска способов преодоления этого противоречия. Переход от регуляторов прямого действия, перемещающих регулирующие органы непосредственно за счёт энергии измерительного органа, к регуляторам непрямого действия, осуществляющим такие перемещения через силовые усилители, с одной стороны, осложнило проблему устойчивости, введя в контур дополнительные инерционные звенья, с другой стороны, сделало схемы регуляторов более гибкими, дав возможность введения в различные точки схемы дополнительных связей и корректирующих звеньев. В 1830 г. Понселе предложил построить регулятор, действующий по возмущению. Принцип Понселе (принцип компенсации возмущающего воздействия) – второй фундаментальный принцип управления. В 1845 г. братья Сименсы предложили воздействовать на регулируемый объект в функции производной отклонения регулируемой величины (принцип управления по производным). В 1892 г. вышла работа знаменитого русского учёного А.М. Ляпунова ”Общая задача об устойчивости движения”. Теория устойчивости движения, созданная А.М. Ляпуновым, имеет исключительное значение для многих прикладных дисциплин. К началу XX в. теория регулирования выходит из прикладной механики и формируется в общетехническую дисциплину. В начале ХХ в. выходят работы словацкого учёного А. Стодолы по регулированию гидротурбин и книга русского учёного Н.Е. Жуковского “Регулирование силовых машин”. В 1932 г. американский учёный Х. Найквист предложил критерий устойчивости по частотным характеристикам системы в разомкнутом состоянии, а в 1936 г. А.В. Михайлов показывает преимущества применения частотных методов, предложив свой критерий устойчивости, не требующий предварительного размыкания цепи. С введением частотных методов начинается новый этап ускоренного развития теории управления. Американские учёные Г. Боде и Л. Маккол в 1946 г., русский учёный В.В. Солодовников в 1948 г. разработали метод логарифмических частотных характеристик (ЛЧХ). Если ранее синтез систем осуществлялся путём интуиции и изобретательства, то метод ЛЧХ открыл новые возможности для исследования качества регулирования и создания теории синтеза структур и параметров математическими методами. В 1940-1950 годы сформировалась по существу новая современная теория автоматического управления: в области устойчивости разработаны методы, существенно облегчающие применение различных критериев устойчивости, введены различные количественные оценки показателей качества процессов регулирования (время регулирования, перерегулирование, колебательность, выброс, степень устойчивости). К.Ф. Теодорчиком, Г.А. Бендриковым, У. Ивенсом, Дж. Тракселом разработан метод корневого годографа. П.С. Стрелков и Э.Г. Удерман получили важные результаты по детальному изучению влияния на переходный процесс расположения нулей и полюсов передаточной функции, в частности путём выделения доминирующих полюсов с целью упрощения исследования. Были развиты различные интегральные оценки качества с помощью определённых интегралов с бесконечным верхним пределом. Впервые в 1940 г. В.В. Солодовниковым предложен метод исследования регуляторов путём воспроизведения условий работы системы на электронных моделях. Значительный вклад в развитие теории управления внесли А.А. Красовский, А.А. Фельдбаум, Г. Джеймс, Н. Никольс, Р. Филлипс, И.Н. Вознесенский, Г.В. Щипанов, Б.Н. Петров, Е.П. Попов, В.А. Бесекерский, А.В. Фатеев, А.А. Вавилов, С.М. Фёдоров, Я.З. Цыпкин. Терминология
Основные понятия Теория автоматического управления (ТАУ) ставит перед собой задачу поддержания заданного состояния в течение необходимого времени без участия человека. До 19 века науки об управлении не существовало. Ее развитие началось в период промышленной революции. Сначала решались задачи регулирования – поддержания заданного значения какой- либо технической характеристики, например: частоты вращения, температуры, давления и т.д. Далее заметили, что принципы управления успешно можно применять не только в технике, но и в экономике, биологии и других науках. Процессы управления и обработки информации в системах любой природы изучает кибернетика. ТАУ является одним из ее разделов, связанных с техническими системами и решает классические задачи регулирования и оптимизации законов управления, а так же вопросы адаптации (самонастройки). Часто названия «теория автоматического регулирования» (ТАР) и «теория автоматического управления» (ТАУ ) используются как синонимы. В зарубежной литературе встречается только один термин « control theory». Мы будем использовать следующую терминологию: 1. Объекты управления 2. Входные и выходные (регулирующие и регулируемые) параметры объекта 3. Возмущающие и управляющие воздействия 4. Управляющая часть в САУ 5. Измерительные преобразователи 6. Исполнительные устройства Для более наглядного пояснения обратимся к примеру, предложенному А.Ю. Ощепковым (1): мы видим лошадь и хотим как можно больше узнать об этом животном. Узнать о заинтересовавшем нас объекте можно многими способами – книги, интернет, рассказы специалистов и т.д. Дальше мы решили на ней прокатиться и сели на лошадь. Теперь конь для нас не объект изучения, а объект управления. Повод в руке всадника – управляющее устройство, взгляд всадника – датчик направления движения, руки реализуют обратную связь, заставляя объект двигаться в нужном направлении с заданной скоростью. Все вместе образует систему управления с обратной связью.
Рисунок №1
Так как в этой системе участвует человек, то это не система автоматического управления. Автоматика – область знаний об устройствах и системах, действующих самостоятельно, без участия человека. Автоматизация – применение математических методов, технических средств и систем сбора и обработки информации для обеспечения функций управления технологическими процессами. Объект автоматизации – технологическое оборудование с реализованным в нем процессом, рассматриваемым с точки зрения управления. Поэтому его обозначают «ТОУ» - технологический объект управления.
Рисунок №3
Автоматизация производства имеет экологическое, социальное и технико-экономическое значение. Средний срок окупаемости САУ около трех лет, что позволило совершить «рывок» в их развитии. Значения автоматизации 1. Благодаря возможности более строго выдерживать технологический регламент повышается объем качественной продукции. 2. Снижаются сырьевые и энергетические затраты на единицу продукции. 3. Повышается производительность труда. 4. Реализуются процессы, которые были невозможны без автоматизации. Экологическое значение заключается в том, что строже регламентируется сброс вредных веществ в окружающую среду и, при этом, уменьшается вероятность непредвиденного сброса отходов. Социальное значение состоит в том, что 1. Облегчаются условия труда. 2. Ликвидируются составляющие, оказывающие вред здоровью обслуживающего персонала. 3. Уменьшается количество обслуживающего персонала на производстве.
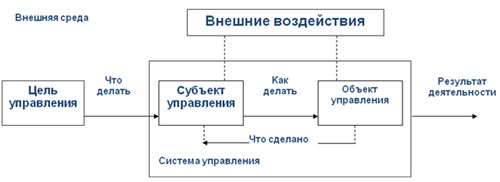
Рисунок №4 СИСТЕМЫ УПРАВЛЕНИЯ. Общие понятия Управление – целенаправленное воздействие на объект с целью обеспечения его оптимального функционирования. Процесс управления в общем виде:
Центральной составляющей для любой САУ является объект управления. К примеру, объектом управления может быть температура воздуха в комнате и температура протекания химической реакции, скорость транспортного средства и скорость протекания химической реакции, количество народонаселения и количество исходной продукции. Второй необходимой составляющей является понятие цели управления, которая состоит в том, чтобы перевести объект в нужное состояние. Субъект управления содержит информацию о ресурсах системы ( подвод электричества или тепла, но и механическая энергия за счет подачи продуктов), контрольную информацию, чтобы знать как проходит процесс, а управляющую – для того, чтобы влиять на этот процесс. С точки зрения управления процесс выглядит так:
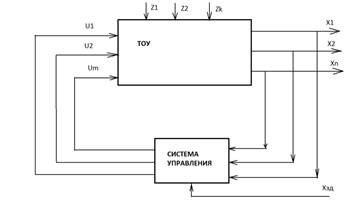
Здесь X – это технологические параметры, характеризующие протекание процесса (расход, давление, температура, состав продукта и т.д.), Xзд – заданные значения технологических параметров, которые являются фиксированными или изменяются по заданному алгоритму, U – управляющие воздействия, т.е. изменение расходов вещества или энергии, подаваемых в объект управления. Система управления формирует управляющие воздействия и вводит их в ТОУ. Технологический объект управления не находится в равновесии из-за наличия возмущающих воздействий Z (состав сырья, расход сырья, изменение коэффициентов теплопередачи в аппарате и т.д.) Таким образом, устройство автоматического управления на основании входящих сигналов должно количественно обработать полученную информацию и выработать сигналы управления по определенному человеком алгоритму или программе. Информационный сигнал не связан с физической природой объекта управления, поэтому САУ рассматривают как абстрактную математическую модель, называемую кибернетическим блоком. В общем виде схему системы управления можно изобразить так:
Рисунок №7
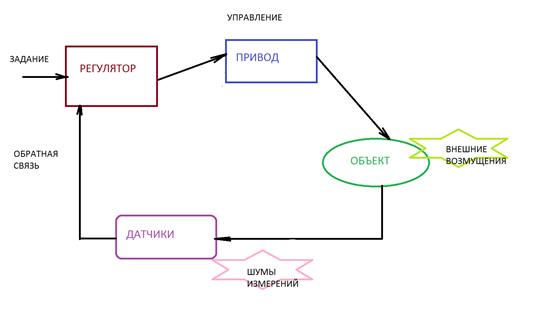
Рассмотрим теперь схему управления в структурном виде:
В типичную схему управления входят объект, регулятор, привод и датчики. Набор этих элементов еще не система, для превращения в систему нужны каналы связи, через которые идет обмен информацией между элементами системы. Для передачи информации используется электрический ток, воздух (пневматические системы), жидкость (гидравлические системы) и компьютерные сети. Взаимосвязанные элементы – это уже система, которая обладает определенными свойствами, присущими только ей. И если бы на объект не действовала окружающая среда – внешние возмущения, которые носят случайный характер, то задача автоматизации решалась бы проще. Внешние возмущения мешают регулятору выполнить поставленную задачу. И еще необходимо понимать, что все датчики измеряют параметры с некоторой погрешностью (шумы измерений). В зависимости от способов решения этих задач рассматривают разные типы СУ. Задачи управления Задачи управления всегда состоят из двух элементов – управляющий (регулятор) и управляемый (объект управления «ТОУ»). Во многих современных системах регуляторы – это микропроцессорные устройства, компьютеры, регулятор температуры – это электронная схема. Рассмотрим одну из основных задач управления – регулирование. Частным, но широко распространенным видом САУ является система автоматического регулирования САР, задача которой заключается в стабилизации выходной величины или обеспечение изменения величины, характеризующей процесс, по определенному закону. Регулирование – это стабилизация технологического параметра около заданного значения с некоторой точностью. Объект, физическая величина которого регулируется, называется объектом регулирования. Для поддержания технологической величины на заданном значении с определенной точностью используют локальные системы регулирования. Следующий тип систем регулирования – разомкнутые системы.
В этом случае регулятор не получает никакой информации о реальном состоянии объекта, следовательно, мы должны заранее знать, как этот объект себя ведет в этих условиях. Тогда можно заранее рассчитать, как нужно управлять этим объектом и составить нужную программу управления. Однако при этом трудно гарантировать, что задание будет выполнено. Такие системы называют разомкнутыми системами или системами программного управления. Пример таких систем: информационное табло, система управления двигателем, в котором не нужно точно поддерживать частоту вращения. В отличие от разомкнутых систем, в замкнутых системах регулирования информация как бы ходит по кругу, регулятор выдает сигнал управления на привод, который воздействует непосредственно на объект, после чего информация об объекте через датчики возвращается обратно к регулятору. Про такие системы говорят, что они содержат обратную связь (регулятор использует информацию о состоянии объекта для выработки сигнала управления). Системы с обратной связью называют замкнутыми.
Рассмотрим, как работает регулятор в такой системе: регулятор сравнивает заданный сигнал x с сигналом обратной связи от датчиков между заданным и фактическим состоянием. Если оно равно нулю, следовательно, управления не требуется. В случае существования рассогласования, регулятор выдает управляющий сигнал, который стремится свести рассогласование к нулю. Такая схема характеризует управление по ошибке (отклонению). Из заданного значения вычитается сигнал обратной связи (измеренное значение). Вывод: если обратная связь используется для того, чтобы уменьшить разницу между заданным и фактическим значением, то она называется отрицательной (сигнал обратной связи вычитается из задающего сигнала). В случае если обратная связь увеличивает рассогласование, то она является положительной и такая схема называется «управление по отклонению с положительной обратной связью» (генераторы с незатухающими электрическими колебаниями).
Задачи исследования Цель любого управления – изменить состояние объекта нужным образом. При этом нас интересуют не материальные и тепловые потоки, а влияние одних величин ОУ (объекта управления) на другие. ТАР (теория автоматического регулирования) должна ответить на вопрос «как построить АСР и выбрать регулятор, который будет ПРАВИЛЬНО управлять данным объектом»? Для этого необходимо построить модель системы: объекта, привода, датчиков, каналов связи (информационные каналы, которые показывают влияние входных величин ОУ на выходные), возмущений, шумов. Связь «входа» и «выхода» Любой объект взаимодействует с внешней средой с помощью входов и выходов. Входы – возможные воздействия на объект, выходы – те сигналы, которые можно измерить. Входы независимы, они приходят из внешней среды или от автоматического регулятора. При изменении информации на входе меняются и выходы.
Следовательно, существует некоторое правило, по которому элемент преобразует вход в выход. Это правило называется ОПЕРАТОРОМ и обозначается U[x]. Запись y=U[x] означает, что выход получен в результате применения оператора U к входу х. Построить модель – найти оператор. С его помощью можно предсказать реакцию объекта на любой входной сигнал. Если бы не существовало возмущений, то зафиксировав управляющее воздействие U один раз, можно было бы всегда знать значение выходной величины Y. При наличии возмущения необходимо сформировать такое воздействие U, чтобы скомпенсировать действие возмущения. Для любого ТОУ можно построить множество моделей, которые будут учитывать (или не учитывать) те или иные факторы. На первом этапе стараются описать объект как можно подробней, но при этом бывает трудно теоретически рассчитать закон управления. Но даже если такой расчет возможен, то оказывается сложно это реализовать, или экономически невыгодно его реализовать. Можно упростить модель, отбросив некоторые маловажные, на взгляд разработчика, детали. Закон управления в таком случае получается проще, и часто с его помощью можно добиться желаемого результата, но нет гарантии, что реальная модель будет точно описывать процессы. Обычно используется компромиссный вариант: начинают с простых моделей, стараясь спроектировать регулятор так, что бы он подходил и для сложных моделей. Это свойство называют РОБАСТНОСТЬЮ (грубостью) регулятора (системы). Оно означает нечувствительность к ошибкам моделирования. Затем проверяют модель на реальном объекте, и если результат не удовлетворяет, то усложняют модель. Задача анализа и синтеза Как мы отметили ранее: технологический процесс как объект управления характеризуется входными и выходными переменными. На структурной схеме объекта управления (рисунок 17) выделяются соответствующие группы переменных.
Переменные процесса связаны между собой функциональными зависимостями, и рассматриваются их изменения во времени. Соответственно, должна быть решена задача анализа системы, определено состояние объекта как функция регулирования, возмущающих параметров и времени
и задачи синтеза, расчета регулирующих воздействий в соответствии с заданным критерием
В результате САУ представляет систему, состоящую из последовательно соединенных элементов, выполняющих определенные функции (рисунок 18).
Рисунок 18 Действительное значение регулируемого параметра (X) с помощью датчика “Д” преобразуется в сигнал (Xg) и поступает на элемент сравнения “ЭС”, на который поступает заданное значение (Xзд) регулируемого параметра. В “ЭС” вырабатывается сигнал рассогласования (DX), поступающий на регулирующее устройство “РУ”, в котором сигнал усиливается и формируется регулирующее воздействие (Xр) в соответствии с принятым законом регулирования. Регулирующее воздействие поступает на исполнительный механизм “ИМ”, который перемещает регулирующий орган “РО”, изменяя, соответственно, расход вещества или энергии так, чтобы привести регулируемый параметр к заданному значению. При анализе АСР принято рассматривать упрощенные блок-схемы, в которых элементы “Д”, “ИМ”, “РО” относят к объекту регулирования (рисунок 18).
Рисунок 19 Здесь X – регулируемый параметр, Xз – заданное значение регулируемого параметра, В задачу анализа входит исследование устойчивости и качества работы САУ, в задачу синтеза входит построение схем регулирования, выбор законов управления, расчет параметров отдельных элементов системы. Моделирование ОУ Существует два способа получения модели объекта управления : формальный и физический. При формальном подходе используют модель типа «черный ящик», в которой не содержится информация о физических процессах, происходящих в объекте, или о его структуре. Синтез формальной модели сводится к выбору одной из небольшого числа моделей, описанных ниже, и идентификации ее параметров. При физическом подходе модель объекта составляют в виде системы уравнений, описывающих физические процессы в объекте. При этом в качестве параметров модели могут использоваться геометрия объекта, физические параметры материала, фундаментальные физические константы. В физическую модель могут быть добавлены несколько формальных параметров, которые необходимо определить экспериментально из условия минимизации погрешности моделирования. Достоинством физических моделей является то, что в процессе построения физической модели в нее вносится информация о структуре объекта. Наличие в модели информации о структуре объекта позволяет лучше отфильтровать помехи и возмущения в процессе подгонки модели к экспериментальным данным. Для аналитического исследования САУ необходимо иметь уравнения, описывающие движение этих систем. Решением этих уравнений определяется изменение во времени регулируемой величины или ошибки системы. По характеру изменения этих величин можно получить полное представление о работоспособности и качестве работы системы. В зависимости от характера управляющего или возмущающего воздействий происходят различные изменения регулируемой величины системы. Процесс изменения регулируемой величины системы за все время ее работы называют процессом управления. В процессе управления различают переходные и установившиеся процессы. Переходным процессом называется изменение регулируемой величины при переходе системы из одного состояния в другое установившееся состояние. Установившийся режим системы, относительно которого рассматривается движение системы в процессе управления, называется исходным режимом. Если воздействия после их приложения больше не изменяют своей величины, то в системе устанавливается статический режим. Режим слежения с постоянной скоростью или режим установившихся колебаний выходной величины в устройстве являются не статическими, а установившимися. Полное движение системы (как в переходном, так и в установившемся режимах) описывается уравнением динамики. Обычно эти уравнения бывают дифференциальными.
Приравнивая к нулю члены, содержащие производные по времени, из уравнения динамики получаем уравнение статики:
ТИПЫ ТЕСТОВЫХ ВОЗДЕЙСТВИЙ. Динамические модели характеризуются непостоянством во времени входных, выходных и промежуточных величин, и описываются дифференциальными уравнениями 1-ого или 2-ого порядка ( в основном), содержащими производные ( скорости и ускорения изменения сигналов). Такие модели получают из физических законов, которые заложены в основу изучаемого объекта и, как правило, являются нелинейными. Модель должна описывать связи реальных сигналов в системе, ее внутреннее устройство. Но если внутреннее устройство можно игнорировать, то часто нам достаточно знать, как будет реагировать объект на заданный входной сигнал. Поэтому такие уравнения, составленные без учета внутренних изменений, называют уравнением «вход – выход». Часто необходимо привести модель к стандартному виду. Стандартом в ТАУ считается система дифференциальных уравнений 1-ого порядка, которая называется нормальной формой Коши. Зная значения, описывающие состояние объекта в некоторый момент времени t и входной сигнал u(t), можно рассчитать поведение объекта для любого последующего момента. Обозначив вектор состояния через x(t), а вход объекта (сигнал управления) через u(t), можно назвать модель, связывающую вход с вектором состояния моделью « вход – состояние». Если модель содержит еще и уравнение выхода, которое показывает, как формируется выход, называется «вход – состояние – выход». Линеаризация
Для упрощения решения систем дифференциальных уравнений применяют их линеаризацию. Линеаризацией называется замена нелинейных уравнений линеаризованными. Линеаризация возможна, если характер линеаризуемого уравнения не имеет разрывов и неоднозначностей. Линеаризация методом малых отклонений заключается в следующем. Нелинейная функция переменных, характеризующих движение системы, имеет вид:
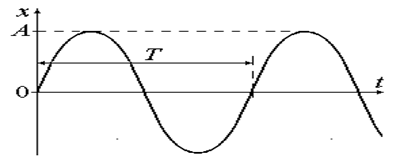
Она раскладывается по степеням малых отклонений ее переменных от значений этих переменных для центра разложения, соответствующих исходному режиму движения в ряд Тейлора. Для удобства пользования уравнения динамики обычно приводят к стандартному виду. Переходная функция Любое движение в системе автоматического управления вызывается воздействием, приложенным к системе. Воздействия могут быть управляющими, которые определяют требуемый закон изменения регулируемой величины, и возмущающими, которые стремятся нарушить требуемую функциональную связь между регулируемой величиной и управляющим воздействием. В общем случае воздействия могут изменяться во времени по закону, который заранее определить невозможно. Но среди многообразия воздействий можно выбрать наиболее типичные для рассматриваемой системы и данных условий ее работы. Изучив движение системы под влиянием данного типового воздействия, можно сделать выводы относительно ее динамических свойств. Кроме того, любое сложное воздействие можно представить суммой простых воздействий. Если известна реакция системы на простое воздействие и система линеаризована, то, используя принцип суперпозиции, можно найти реакцию системы на воздействие сложной формы. Поэтому для анализа и синтеза САУ часто используют эталонные типовые воздействия: 1)Единичная ступенчатая функция; 2)Единичная импульсная функция; 3)Гармоническая функция; Единичная ступенчатая функция 1(t) (функция включения Хевисайда) является математическим описанием величины, изменяющейся мгновенно м момент времени t=0 от 0 до 1 и остающейся неизменной впоследствии.
Рисунок 20.
При ступенчатом изменении функции на произвольную величину А, отличную от единицы, используют произведение Примером ступенчатого воздействия может явиться воздействие, оказываемое на систему регулирования напряжения резким сбросом или подключением нагрузки на генератор. Единичная импульсная функция
Функцию Практически за импульсные воздействия можно принимать воздействия, сообщающие системе за время, значительно меньшее продолжительности переходного процесса, конечное количество энергии. Гармоническая функция описывает величины, изменяющиеся во времени по гармоническому закону:
Рисунок
Вещественная форма записи гармонической функции: |
Последнее изменение этой страницы: 2017-04-12; Просмотров: 1214; Нарушение авторского права страницы








 и определяет рассогласование
и определяет рассогласование  – разницу
– разницу



 – вектор входных переменных, характеризует состояние процесса и называют управляемыми (регулируемыми) параметрами. Это такие параметры, как температура, давление, состав, концентрация, расход и т.п.
– вектор входных переменных, характеризует состояние процесса и называют управляемыми (регулируемыми) параметрами. Это такие параметры, как температура, давление, состав, концентрация, расход и т.п. – вектор входных переменных, называемых управляющими (регулирующими) воздействиями. К ним относятся параметры, с помощью которых можно изменять материальные и энергетические потоки, в основном расход, давление, температура и т.п.
– вектор входных переменных, называемых управляющими (регулирующими) воздействиями. К ним относятся параметры, с помощью которых можно изменять материальные и энергетические потоки, в основном расход, давление, температура и т.п. – вектор входных переменных, называемых возмущающими воздействиями, являющихся внешними воздействиями по отношению к объекту. Это параметры, связанные с изменением режимов работы процесса и внешней среды такие, как изменение расходов, температур, давлений, состава сырья и т.п.
– вектор входных переменных, называемых возмущающими воздействиями, являющихся внешними воздействиями по отношению к объекту. Это параметры, связанные с изменением режимов работы процесса и внешней среды такие, как изменение расходов, температур, давлений, состава сырья и т.п.



 , где
, где и
и  - коэффициенты, зависящие от параметров системы, x – регулируемая величина, g – управляющая величина, изменяющаяся во времени, m и n – числа, показывающие порядок производных по времени.
- коэффициенты, зависящие от параметров системы, x – регулируемая величина, g – управляющая величина, изменяющаяся во времени, m и n – числа, показывающие порядок производных по времени. или x=k
или x=k  , где
, где  – передаточный коэффициент.
– передаточный коэффициент.


 .
. (дельта- функция Дирака) обозначает бесконечно короткий (по длительности) и бесконечно большой по амплитуде импульс с единичной площадью:
(дельта- функция Дирака) обозначает бесконечно короткий (по длительности) и бесконечно большой по амплитуде импульс с единичной площадью:  =
=  при t=0 и
при t=0 и  при этом
при этом
 можно представить как предельное значение прямоугольного импульса с длительностью
можно представить как предельное значение прямоугольного импульса с длительностью  и амплитудой
и амплитудой  при
при  , при этом
, при этом  ,
,  . Дельта-функцию можно определить и как производную от единичного ступенчатого воздействия:
. Дельта-функцию можно определить и как производную от единичного ступенчатого воздействия:  .
.