|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Пропорциональный закон регулирования
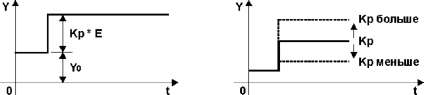
П - регулятор - это регулятор, реализующий простейший пропорциональный закон регулирования. Функционально он представляет собой безинерционный усилитель, а структурно – алгоритмически это пропорциональное звен. Таким образом, П – регулятор просто усиливает сигнал ошибки в некоторое число раз. Важность П – регулятора определяется тем, что в САР, где он используется, изменяя его коэффициент усиления, можно не только добиться устойчивости САР, но и оптимизируя значение этого коэффициента оптимизировать и качество всей САР. Однако, получить требуемые или просто хорошие показатели качества САР с помощью одного только П - регулятора не удается. Законом действия регулятора (законом регулирования или алгоритмом регулирования) называют функциональную взаимосвязь между погрешностью регулирования ε =узд-у и изменением управляющего воздействия Δ u: Δ u(τ )=f[ε (τ )] или u-u0=f(узд-у), где u – текущее значение управляющего воздействия; u0- значение управляющего воздействия, соответствующее заданному значению управляемого параметра узд. Пропорциональным называют линейный закон регулирования, отражающий прямо пропорциональную зависимость между изменением управляющего воздействия и погрешностью регулирования: Δ u(τ )=Крε (τ ), где Кр – коэф усиления, являющийся параметром настройки пропорционального регулятора. Параметрами П-регулятора являются коэффициент усиления Кр и рабочая точка Y0. Рабочая точка Y0 определяется как значение выходного сигнала, при котором рассогласование регулируемой величины равно нулю. При влиянии возмущающих воздействий возникает, в зависимости от Y0, отклонение регулирования.
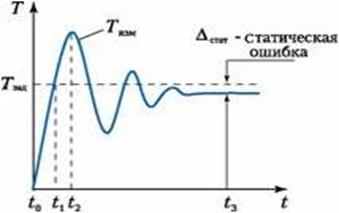
Переходная характеристика системы с П- регулятором приведена ниже.
Чем больше Кр, тем круче статическая характеристика, тем меньше статическая погрешность. При Кр=0 (линия 0) отклонение текущего значения параметра от заданного значения не вызывает никакого перемещения затвора регулирующего органа. Это равносильно отсутствию регулятора, и возмущение компенсировано быть не может. При Кр=∞ (линия 3) п-регулятор не давал бы статической погрешности (ε ∞ =0). Практически такой регулятор реализовать нельзя. Коэффициент усиления регулятора не должен превышать некоторого максимального допустимого значения. Отсюда следует, что избавиться от недостатка, присущего пропорциональному закону – статической погрешности – принципиально невозможно. Можно уменьшить статическую ошибку регулирования, увеличивая Кр. С увеличением Кр статическая ошибка уменьшается, однако при этом уменьшается и устойчивость системы. Поэтому при выборе значения Кр следует учитывать оба обстоятельства. Статические характеристики: допустим, что для компенсации некоторого возмущающего воздействия требуется некоторое управляющее воздействие. Для его формирования П-регулятору необходимо, чтобы регулируемый параметр принял новое значение, отличающееся от заданного, на некоторую величину (величину статической погрешности ε ∞ ).
Передаточная функция: Передаточная функция соответствует передаточной функции статического звена нулевого порядка и, следовательно, в динамическом отношении П – регулятор является статическим звеном нулевого порядка.
Переходная характеристика: h(τ )= Кр∙ 1(τ ). При изменении регулируемого параметра П-регулятор мгновенно формирует управляющее воздействие, т.е. является безынерционным. Частотная передаточная функция: Wp(jω )= Кр.
АФЧХ П-регулятора изображается одной точкой на действительной оси на расстоянии Kp от начала координат. Амплитудная и фазовая частотные характеристики: Ар(ω )= Кр; φ р(ω )=0.
Если на вход П-регулятора подать гармонические колебания, то выходная величина его изменяется по гармоническому закону без запаздывания. Амплитуда выходных колебаний в Кр раз отличается от амплитуды входных колебаний. П-регуляторы могут применяться для управления объектами с самовыравниванием и без самовыравнивания при небольших изменениях нагрузок, если технологическим режимом допустимо остаточное отклонение параметра от заданного значения (статическая ошибка). Достоинство П – регуляторов – простота и быстродействие, а так же малая динамическая ошибка в начале переходного процесса. САУ с таким регулятором обладают устойчивостью. Недостаток – установившаяся статистическая ошибка, приводящая к остаточному отклонению регулируемого параметра. |
Последнее изменение этой страницы: 2017-04-12; Просмотров: 1176; Нарушение авторского права страницы