|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
КАЗАНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙСтр 1 из 13Следующая ⇒
КАЗАНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ им. А.Н.ТУПОЛЕВА
Г.С.ГОРШЕНИН
ЛАБОРАТОРНЫЙ ПРАКТИКУМ ПО ОБОРУДОВАНИЮ АВТОМАТИЗИРОВАННОГО ПРОИЗВОДСТВА
2008 г. Министерство образования и науки Российской Федерации
КАЗАНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ им. А.Н. ТУПОЛЕВА
Г.С.ГОРШЕНИН
ЛАБОРАТОРНЫЙ ПРАКТИКУМ ПО ОБОРУДОВАНИЮ АВТОМАТИЗИРОВАННОГО ПРОИЗВОДСТВА
2008 г.
Г.С. Горшенин Оборудованию автоматизированного производства: Лабораторный практикум. / Казань: Издательство Казан. гос. техн. ун-та, 2008. 42с.
Лабораторные работы предназначены для закрепления теоретического материала по дисциплине «Оборудованию автоматизированного производства» студентами специальности 151001. Дано описание конструкций и технических характеристик оборудования современного автоматизированного производства, промышленных роботов, гибких производственных систем. Рассмотрены системы управления основного и вспомогательного оборудования.
Табл. - Ил. - Библиогр:. назв
Рецензенты:
Рекомендовано к изданию Учебно-методическим центром КГТУ им. А.Н. Туполева
Лабораторная работа №1 Токарно-револьверный автомат 1Д112
Цель : Изучение конструкции, принципа работы токарно-револьверного автомата 1Д112 и поверочный расчет кулачка системы управления. Токарно-револьверный автомат мод. 1Д112 предназначен для изготовления деталей сложной формы из пруткового материала с применением различного режущего инструмента. Технические характеристики: Максимальный диаметр прутка, мм………………………..………………12 Мощность привода главного движения, кВт……………………………….2, 2 Мощность привода вспомогательного вала, кВт…………………………. 0, 6 Диапазон частот вращения шпинделя, об/мин…………………..…..5000 – 160 Переключение частот вращения шпинделя……………………….ступенчатое Количество позиции в револьверной головке…………….………………….6 Количество суппортов ………………………………………….……………..3 Система управления ………………………………………..централизованная, кулачковая от распределительного вала. Размеры длина х ширина х высота, мм………………… Вес, кг…………………………………………………..……………………
Кинематическая схема станка 1Д112 Главное движение - вращение шпиндель получает от электродвигателя АОЛ2-32-6 (рис.2) (N=2, 2 кВт,
На правых оборотах происходит нарезание резьбы, а на левых более высоких - свинчивание резьбонарезного инструмента, а также точение, сверление и другие операции. Для настройки чисел оборотов шпинделя к станку прилагается три пары сменных колёс А и Б. Кинематические цепи привода вспомогательного вала и распределительного вала - см. разделы: «Вспомогательный вал», «Распределительный вал» . Проверочный расчет a. Используя уравнения (3) – (6) для заданной пары зубчатых колес А, Б рассчитываем частоту вращения шпинделя - b. Скорость резания рассчитывается по формуле
где d – диаметр детали в рассматриваемом переходе,
3. Определяем частоту вращения распределительного вала для выбранных сменных зубчатых колес а, б, в, г, д по уравнению
При работе автомата деталь изготавливается за 1 оборот распределительного вала, т.е. длительность цикла составляет
4. Определяем число оборотов шпинделя за 1 оборот распределительного вала, т.е. за время одного цикла
2. Для определения количества оборотов шпинделя для каждого перехода необходимо иметь чертеж кулачка револьверной головки и накладной трафарет (кальки) с нанесением 100 лучей (от 0 до 100). Разделив число оборотов, идущее на изготовление детали, на 100, определяют число оборотов, приходящихся на 1 луч:
3. Накладывая трафарет на чертеж кулачка, определяют сколько лучей приходится на каждый переход (см. рис.6). На рисунке показан изготовленный кулачок, цифрами по окружности указаны № лучей. Например: 0-2, т.е. с 0 по 2 луч происходит подача прутка – переход занял 2 луча, с 2 по 4- луч - поворот револьверной головки – этот переход занял 2 луча; с 4 по 11 луч - центровка - этот переход занял 7 лучей и т.д. 4. Зная количество лучей на каждый переход (
5. Определяем длительность каждого перехода
6. По чертежу кулачка определяем путь инструмента на каждом переходе по формуле:
где
7. Для определения подач, используемых на станке при изготовлении детали, необходимо путь инструмента разделить на количество оборотов шпинделя данного перехода:
Порядок выполнения работы
1. Изучить конструкцию, технические характеристики и кинематику токарно-винторезного автомата. 2. Выполнить поверочный расчет для.заданной детали. Контрольные вопросы
1. Из каких узлов состоит токарно-винторезный автомат? 2. Основные технические характеристики автомата? 3. Как работает механизм подачи и зажима прутка? 4. Как работает механизм отвода и поворота револьверной головки? 5. Кинематика автомата. 6. Какая система управления автомата 7. Как осуществляется наладка автомата? 8. Как выполняется поверочный расчет?
Приложение Частоты вращения шпинделя токарно-винторезный автомат 1Д112 Таблица 1.
Длительность одного оборота распределительного вала (время цикла) Таблица 2
Лабораторная работа №2 Агрегатный автомат АА-2 Цель – изучить конструкцию, технологические характеристики и наладку агрегатного автомата АА-2.
Рис. 1 Общий вид агрегатного Автомата АА-2 1 – станина; 2 – револьверный барабан; 3 – цанговый зажим; 4 – приемная призма; 5 – головка загрузочная; 6 – магазин; 7 - бункер; 8 – рычаг; 9 – инструментальные головки; 10 – пульт управления; электрошкаф
Обрабатываемые изделия Наибольший диаметр изделия для закрепления в цанге, мм. 4 Наибольшая длина обрабатываемого изделия, мм 50 Наибольший диаметр сверления, мм. 3 Наибольшая глубина сверления, мм. 20 Наибольшая длина фрезерования, мм. 20 Сверлильная головка Электродвигатель трехфазного тока АОЛ-12/Щ-2 Мощность электродвигателя, вт. 76 Число оборотов, в мин. 3000 Число оборотов шпинделя в мин. 7500 Наибольшее осевое перемещение шпинделя, мм. 30 Описание автомата Автомат АА-2 (рис. 1) восьмипозиционный, агрегатный, карусельного типа с вертикальным расположением оси револьверного барабана. Барабан имеет восемь гнезд с цанговыми зажимами (рис. 3). Вокруг барабана на столе станины расположены рабочие позиции. На первой позиции установлена загрузочная головка (рис.4) и бункер (рис. 1 поз. 7) с магазином (6). Поштучная выдача заготовок из магазина осуществляется с помощью отсекателя
На последующих шести позициях в соответствии с технологическим процессом обработки изделия устанавливаются инструментальные (силовые) головки (рис.1. поз.9). Автомат имеет три типа инструментальных головок: сверлильные, фрезерную и протяжную (рис.5). Сверлильные и фрезерная головки имеют индивидуальные электродвигатели. Например, в соответствии с технологическим процессом изготовления гнезда или штыря штекерного разъема (рис. 2) на столе автомата установлены: - на второй позиции – сверлильная головка для центровки;
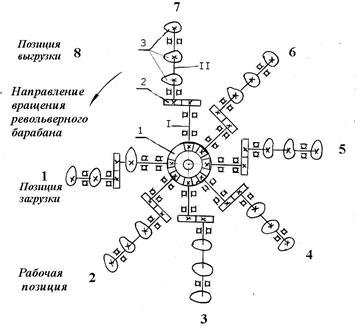
- на третьей позиции – сверлильная головка для сверления глухого отверстия; - на четвертой позиции – фрезерная головка для обработки конца заготовки; - на пятой позиции – протяжная головка для снятия лыски; - на шестой позиции – головка для контроля наличия глухого отверстия; - на седьмой позиции – сверлильная головка для развертывания глухого отверстия. Восьмая позиция станка является разгрузочной. Здесь установлена разгрузочная головка в виде рычага (рис.1 поз.8), с помощью которого воздействуя на шаровую опору (рис.3 поз.5) цангового зажима револьверного барабана освобождают деталь, и приемник готовых деталей в виде трубчатого лотка и емкости. Для прерывистого вращения револьверного барабана используется механизм прерывистого движения – мальтийский крест. В нижней части станины установлены: электродвигатель и редуктор привода, а также насос с баком СОЖ. Охлаждающая жидкость подведена к каждой рабочей позиции. Система смазки централизованная и местная. Электрооборудование станка расположено в шкафу (рис.1. поз. 11). Пульт управления станком расположен в верхней части станины (10). В режиме наладки для медленного вращения кулачково-распределительной системы используется специальный электродвигатель (АОЛ-11/4, N=0.12 квт., n=1400об\мин.). Для управления им на внешней окружности стола установлены три пары кнопок. Работа автомата Последовательность операций в общем цикле работы автомата следующая: 1. На первой рабочей позиции: - подача заготовок, например, из вибробункера с одновременной ориентацией деталей по лотку в магазин; - отсечка одной заготовки из магазина с помощью отсекателя и подача ее на приемную призму (рис.1. поз.4); - подача заготовки с приемной призмы загрузочной головкой в цангу револьверного барабана; - зажим заготовки цангой. 2. Поворот револьверного барабана с заготовкой на вторую рабочую позицию. 3. На второй рабочей позиции обработка заготовки (например, центровка и калибровка внешнего диаметра заготовки). Заготовки переместившиеся на другие рабочие позиции (3-7) подвергаются обработке и контролю согласно техпроцесса. 4. Поворот револьверного барабана на восьмую рабочую позицию. 5. На восьмой разгрузочной позиции разжим цанги и выталкивание обработанной детали в приемник готовой продукции. Операция обработки заготовки на рабочей позиции в общем виде состоит из следующих элементов: - быстрый подвод инструмента к заготовке, - рабочая подача инструмента, - быстрый отвод инструмента в исходное состояние. Все элементы операции обработки заданы в форме кулачка. Кинематика автомата Кинематическая схема автомата АА-2 представлена на рис.6. Тихоходный вал редуктора через шлицевое соединение связан с водилом 3 мальтийского механизма 4. От мальтийского креста прерывистое вращение передается револьверному барабану через пару конических зубчатых колес 5 с передаточным отношением i=2 и шлицевое соединение 6. Кроме того, на тихоходном валу (V) редуктора насажены кулачек 7, управляющий зажимом цанг, и коническая шестерня 8 привода кулачково-распределительной системы. Кулачково-распределительная система (рис.7) имеет семь ветвей. Каждая ветвь состоит из промежуточного вала (I), связанного с центральным коническим зубчатым колесом 1 и блока кулачков 3 на валу (II). Движение от промежуточного вала к блоку кулачков передается с помощью пары цилиндрических зубчатых колес 2.
Уравнение кинематической цепи, связывающее вал (рис.6. Х), на котором находится блок кулачков, с валом электродвигателя (I )
Вал (Х) делает один оборот за время работы инструментальных головок. Это время называется циклом и обозначается буквой
Время цикла определяется временем самой длительной операцией, выполняемой на агрегатном автомате. Время цикла устанавливается согласно карте наладки автомата (технологического процесса) за счет изменения передаточного отношения клиноременной передачи (А, В). Блоки кулачков являются сменными и могут состоять из одного, двух или трех кулачков. Кулачковые блоки расположены напротив рабочих позиций автомата, под ними. Движение от кулачков (рис.6. поз.9) к механизмам подач инструментальных головок передается с помощью прямых толкателей (10), установленных в отверстия стола станка. Например, в механизме подачи, (рис.3) движение от толкателя 1 передается к толкателю 5 с помощью зубчатого зацепления сектора 2 с колесом 4 и реечного зацепления колеса 4 с толкателем детали 5. Возврат толкателя в исходное положение осуществляется с помощью возвратной пружины 6. В инструментальных головках с индивидуальными электродвигателями соединение валов электродвигателей со шпинделем прямое – через упругие муфты и посредством клиноременной передачи. Разгрузка детали на восьмой позиции происходит за счет передачи движения от толкателя седьмой рабочей позиции через рычаг, шаровую опору цангового зажима (рис. 3 поз.5) на толкатель 4, который перемещаясь вниз раскрывает цангу 1 за счет перемещения ее в право под действием пружины 3. Компоновка автомата обеспечивает легкую и быструю установку сменных элементов, а также сборку и разборку автомата. Возможности автомата, как агрегатного станка, могут быть значительно расширены при оснащении его специальными инструментальными головками и загрузочными устройствами.
Наладка автомата
Наладка автомата на обрабатываемое изделие осуществляется в соответствии с заданным технологическим процессом. Составление документации на наладку рекомендуется производить в следующей последовательности: 8. Анализ технологического процесса изготовления детали с целью определения оптимальной концентрации операций обработки на агрегатном станке. 9. Составление схемы расположения инструментальных головок на столе автомата. 10. Разработка операционных карт наладки. 11. Выбор цикла работы автомата и составление циклограммы. 12. Проектирование режущего инструмента, зажимных цанг, кулачков, толкателей, загрузочного устройства и т.п. Наладка автомата включает в себя установку: - инструментальных головок на столе автомата в технологической последовательности; - кулачков, спроектированных для каждой операции; - толкателей; - зажимных цанг револьверного барабана; - режущего инструмента с заданным расположением относительно торца цанги и ее оси; - частоты вращения распределительного вала путем переброски клинового ремня на шкивах привода; - загрузочного устройства (бункера); - режима работы загрузочного устройства (производительность загрузочного устройства должна быть не меньше производительности автомата); Комплектация необходимыми сменными узлами, деталями, приспособлениями и инструментом осуществляется по картам наладки. Инструментальные головки устанавливаются на столе станка по схеме установки головок в соответствии с размерами (от оси револьверного блока до торца шпинделя головки), указанными в картах наладки. Установка головок производится без выверки. Установочными элементами являются направляющие шпонки и средний Т-образный паз. Инструментальные головки являются взаимозаменяемыми и могут быть установлены на любой из рабочих позиций стола станка. Загрузочное устройство (бункер) устанавливается на столе так, чтобы выход деталей (заготовок) осуществлялся на приемную призму. Установка приемной призмы производится по карте наладки, в которой указано ее положение относительно элементов револьверного барабана. Установка сменных кулачков на валах кулачковых блоков производится согласно циклограммы и карт наладок. При этом, водило мальтийского креста устанавливается под углом 45 к вертикали в положение, соответствующее началу поворота креста и кулачков. Кулачки закрепляются на валу с обеспечением совмещения риски на кулачке и линии центров кулачка с осью толкателя. При установке толкателей, пробки, закрывающие отверстия гнезд в столе станка, заменяются втулками. При установке инструмента руководствоваться размерами, указанными в картах наладки. В целях сокращения времени целесообразно установку инструмента производить при помощи шаблонов. Точная настройка положения инструмента производится при помощи регулировочного винта на зубчатом секторе подачи (рис.4. поз.3) инструментальной головки При наладке используется замедленный, наладочный режим работы станка. При этом управление осуществляется кнопками, расположенными в трех местах по окружности стола. При наладке автомата устанавливают частоту вращения распределительного вала и режим работы загрузочного устройства. (Производительность загрузочного устройства должна быть не меньше производительности автомата.)
Порядок выполнения работы 1. Изучить конструкцию автомата и его кинематическую схему. 2. Для заданного передаточного отношения клиноременной передачи (А/В) определить длительность цикла и производительность автомата. 3. Составить уравнение кинематической цепи, связывающее вал (рис.6. IХ), на котором находится револьверный барабан, с валом электродвигателя (I ) 4. Определить время поворота револьверного барабана. 5. Определить время, отводимое на работу инструментальной головки. 6. Построить циклограмму работы АА-2. 7. Освоить приемы наладки автомата.
Контрольные вопросы
1. Из каких узлов состоит агрегатный автомат? 2. Основные технические характеристики автомата? 3. Как работает зажимное устройство? 4. Как работает загрузочная головка? 5. Какая последовательность операций в общем цикле работы автомата? 6. Кинематика автомата. 7. Как осуществляется наладка автомата? 8. Какая система управления агрегатного автомата?
Лабораторная работа № 3
Цель: изучение технических характеристик, конструкции промышленного робота ЦПР-1П и получение практических навыков по его наладке.
Технические характеристики
Число степеней подвижности 4 Номинальная грузоподъемность, кг 1 Система координат цилиндрическая Привод пневматический Давление воздуха в сети питания, Мпа 0, 4+0, 1 Питание от сети переменного тока, напряжение, В 220 Потребляемая мощность, Вт, не более 300 Система управления цикловая, от микроконтроллера МКП-1 Управление подъемом, поворотом и выдвижением руки манипулятора путевое Управление сгибом (ротации) кисти, захватом по временному принципу Режимы работыробота: - автоматический, - наладочный Число одновременно управляемых движений 1 Ввод и отладка программы склавиатуры МКП-1 Объем памяти МКП, байт 512 Габаритные размеры манипулятора, мм, не более длина х ширина х высота 610 х 380 х 620 Масса манипулятора, кг, не более 65 Габаритные размеры стойки управления, мм, длина х ширина х высота 400 х 400 х 1000 Мaccа стойкиуправления, кг, неболее 70 Параметры горизонтального перемещения Максимальное линейное перемещение, мм 200 Время перемещения, с, не менее 0, 4 Максимальная скорость, м/с, не более 0, 9 Параметры вертикального перемещения Максимальное линейное перемещение, мм 100 Время перемещения, с, не менее 0, 5 Максимальная скорость, м/с, не более 0, 3 Поворот относительно вертикальной оси Максимальное угловое перемещение, град 240 Время перемещения, с, не менее1, 2 Максимальная скорость, град/с, не более 300 Параметры механизма сгиба Максимальное угловое перемещение, град 90 Время перемещения, с, не более 0, 4 Максимальная скорость, град/с, не более 300 Параметры механизма ротации Максимальное угловое перемещение, град 90, 180 Время перемещения, с, не менее 0, 35 Максимальная скорость, град/с, не более 650 Показатели захватного устройства Усилие захватывания, Н, не менее 90 Время срабатывания захвата, с, не более 0, 3 Максимальный диаметр захватываемых деталей, мм 45 Подготовка робота к работе
Подготовка робота к работе осуществляется в следующей последовательности. 1. При пуске робота необходимо установить переключатель на пульте микроконтроллера в положение «ВКЛ», в результате чего загорятся индикаторы «СЕТЬ» и «НЕТ ВОЗДУХА». Подать сжатый воздух в пневмосистему. При необходимости произвести настройку регулятора давления на давление 0, 4 Мпа и реле давления таким образом, чтобы контакты микропереключателя размыкали цепь управления при давлении ниже 0, 4 Мпа. При подаче сжатого воздуха индикатор «НЕТ ВОЗДУХА»погаснет. 2. Нажать кнопку «МКП». В результате сработает реле и подключится независимое электропитание. 3. Включить выключатель «СЕТЬ» микроконтроллера и нажать кнопку «СБР». В результате загорятся индикаторы напряжения питающей сети, «ОЖ» и «Р», показывающие, что микроконтроллер находится в режиме «РУЧНОЙ» и ожидает ввода команды с клавиатуры пульта управления микроконтроллера (ПУ МКП). В исходном положении манипулятора должно быть соответствие состояний по входам, отображаемых на индикаторах микроконтроллера (табл. 1) Таблица 1
При остановке робота кнопкой «ОБЩ СТОП» или блокировкой ограждения для подготовки микроконтроллера к работе после устранения неисправностей нажать кнопку «МКП». Связь команд вывода с управляемыми по ним внешними нагрузками приведена в табл. 2. Состояние каждого входа и выхода отображается на индикаторах, выведенных на переднюю панель модулей ввода дискретных сигналов микроконтроллера.
Таблица 2
Устройство микроконтроллера Основными узлами микроконтроллера (рис. 1) являются: · корпус; · пульт управления; · функциональные модули; · модули источника питания; · сетевой фильтр. На передней панели микроконтроллера расположены все необходимые органы управления и индикации: · выключатель «СЕТЬ»; · индикатор напряжения питания сети и предохранители; · индикаторы наличия напряжения вторичных стабилизированных источников питания +5, +12, -5 В и энергонезависимого питания для модуля энергонезависимого запоминающего устройства (МЭНЗУ);
Рис. 1. Микроконтроллер МКП-1: а – лицевая сторона, б – обратная сторона
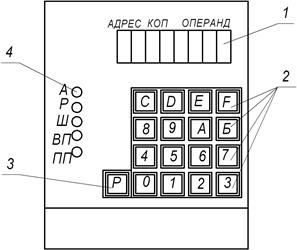
· индикаторы входов и выходов микроконтроллера; · индикатор «ОЖ», включенное состояние которого сигнализирует оператору о том, что микроконтроллер находится в режиме ожидания ввода информации с клавиатуры пульта управления; · пульт управления. На задней панели закреплен сетевой фильтр и шесть розеток соединителей типа РП15-32 (00–0F, 10–1F, 20–2F), предназначенные для подключения внешнего оборудования и датчиков. В составе микроконтроллера можно выделить: · модуль процессора (МПР); · систему памяти; · систему ввода-вывода, обеспечивающую с помощью соответ-ствующих модулей связь МПР с пультом управления, управляющей ЭВМ высшего ранга и внешним технологическим оборудованием; · систему электропитания. Модуль процессора выполнен на БИС КР580ИР80, осуществляет сбор, цифровую обработку и вывод информации в соответствии с исполнительной программой, записанной в перепрограммируемое постоянное запоминающее устройство (ПЗУ) модуля памяти (МП). Исполнительная программа является неотъемлемой частью микро-контроллера, недоступной для пользователя. Ее назначение – преобразование инструкций, введенных оператором с пульта управления (ПУ) или посту-пающих от управляющей программы, в последовательность кодов машинного языка микроконтроллера, реализующих эти инструкции. Управляющая программа (УП) – программа, написанная пользователем в кодах входного языка микроконтроллера и обеспечивающая выполнение заданного алгоритма управления внешним оборудованием. Она размещается вмодулях энергонезависимого запоминающего устройства и сохраняется при отключении первичного питания микроконтроллера благодаря использованию автономного электропитания. Пульт управления (ПУ) (рис.8) совместно с модулем управления (МУ) составляет технические средства общения оператора с микроконтроллером. ПУ включает в себя клавиатуру для ввода команд и управления режимом работы микроконтроллера, 8-разрядный однострочный дисплей и индикаторы режимов работы.
Рис.8. Пульт управления: 1- дисплей; 2 – клавиатура; 3 – индикаторы режимов работы; 4 – клавиша режимов работы Модуль ввода (МВВ) и вывода (МВЫВ) дискретных сигналов пред-назначен для связи микроконтроллера с внешним технологическим оборудованием (исполнительными устройствами, датчиками состояния оборудования, реле и т.п.). Модуль последовательного интерфейса (МПИ) предназначен для обмена информацией между микроконтроллером и ЭВМ высшего ранга в автоматической системе управления технологическим процессом. Система электропитания микроконтроллера преобразует первичное напряжение питающей сети во вторичное стабилизированное напряжение, необходимое для питания его модулей.
Режимы работы В каждый текущий момент микроконтроллер может находиться в одном из пяти режимов работы: · автоматическом, · ручном, · пошаговом, · ввода программы, · просмотра программ, отображаемых на ПУ светодиодами А, Р, Ш, ВП, ПП. Режим “Ввод программы” используется для записи кодов команд управляющей программы в энергонезависимое запоминающее устройство (ЭНЗУ). Необходимая команда набирается оператором на клавиатуре ПУ. Процессор под управлением исполнительной программы считывает коды нажатых клавиш, формирует из них код команды и пересылает его в ЭНЗУ по адресу, определяемому счетчиком команд, который размещен в оперативном запоминающем устройстве (ОЗУ) МП. По окончании пересылки каждой команды содержимое счетчика команд увеличивается на единицу. Вводимая информация совместно с текущим значением счетчика команд отображается на дисплее. Структура режима “Просмотр программы” аналогична режиму “Ввод программы”, однако направление прохождения информации противоположно. В соответствии с адресом ячейки ЭНЗУ, записанной в счетчике команд, процессор производит считывание содержащейся в этой ячейке информации и выводит ее на дисплей совместно с текущими значениями счетчика команд. Содержимое счетчика команд модифицируется и процессор переходит в режим ожидания нажатия клавиши, воспринимаемого им как команда вывода на дисплей содержимого очередной ячейки ЭНЗУ. В режиме управления “Ручной” процессор взаимодействует с ПУ аналогично режиму “Ввод программы”, однако сформированный код команды не записывается в ЭНЗУ, а выполняется. “Автоматический” режим работы является основным и предназначен для управления технологическим оборудованием в соответствии с управляющей программой, записанной в ЭНЗУ. В этом режиме клавиатура для ввода кодов команд заблокирована. “Пошаговый” режим используется при отладке УП, в котором процессор осуществляет выборку из ОЗУ и выполнение очередной команды, после чего изменяет содержимое счетчика команд и переходит в режим ожидания ввода с клавиатуры. Каждое нажатие клавиши иницирует процессор на выполнение очередного шага программы. В паузах между выполнением команд процессор выводит на дисплей адрес и содержимое ячейки ЭНЗУ, хранящей команду, которая будет выполняться на следующем шаге. Таблица 3 |
Последнее изменение этой страницы: 2017-05-05; Просмотров: 873; Нарушение авторского права страницы
 Кафедра технологии машиностроения и организации производства
Кафедра технологии машиностроения и организации производства УДК 621.0
УДК 621.0  =950 об/мин) через ряд зубчатых колёс и клиноременную передачу. Переключением четырех электромагнитных муфт (ЭМ1 - ЭМ4) шпиндель получает (при данных сменных колёсах А и Б) два правых (обозначенных ниже знаком +) и два левых (обозначенных знаком - ) числа оборотов:
=950 об/мин) через ряд зубчатых колёс и клиноременную передачу. Переключением четырех электромагнитных муфт (ЭМ1 - ЭМ4) шпиндель получает (при данных сменных колёсах А и Б) два правых (обозначенных ниже знаком +) и два левых (обозначенных знаком - ) числа оборотов:  (-) (3)
(-) (3) (+) (4)
(+) (4) (-) (5)
(-) (5) (+) (6)
(+) (6) .
.
 ,
,  .
. .
. .
. .
. ) и зная обороты, приходящиеся на один луч (с), можем подсчитать количество оборотов шпинделя на выполнение каждого перехода
) и зная обороты, приходящиеся на один луч (с), можем подсчитать количество оборотов шпинделя на выполнение каждого перехода .
.
 ,
,  - радиус окружности, проведенный через наивысшую рабочую поверхность кулачка для I перехода,
- радиус окружности, проведенный через наивысшую рабочую поверхность кулачка для I перехода,  - радиус окружности, проведенный через наименьшую рабочую поверхность кулачка для I перехода.
- радиус окружности, проведенный через наименьшую рабочую поверхность кулачка для I перехода. .
.











 .
.