|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Наладка и регулировка робота
После первого пуска в наладочном режиме работы робота производится регулировка величин перемещений и скоростей движений его узлов. Настройка величин перемещений производится при отключенном давлении воздуха. Настройка горизонтальных перемещений робота Необходимую величину горизонтального перемещения установить перемещением подвижных упоров 2 (см. рис. 5) по направляющей колонне 7. Затем необходимо завернуть иглу 12 до отказа, тем самым отключить гидравлическое тормозное устройство (демпфер). При подаче под давлением воздуха механизм горизонтальных перемещений должен отойти назад. Регулировочным винтом 14 произвести точную настройку этого (исходного) положения. Затем с клавиатуры микроконтроллера подать команду на перемещение механизма (06 02), т.е. включить механизм горизонтальных перемещений (см. табл. 2). Рука робота выдвинется вперед. Регулировочным винтом 14 произвести точную подстройку величины перемещения. Установить индукционные датчики 10 таким образом, чтобы расстояние между ними и втулками 11 было 2-3 мм. Аналогично проводится установка датчиков вертикальных и угловых перемещений. Выворачивая иглу 12, получить минимальное время перемещения без ударов в конце перемещения. Если механизм работает жестко с ударами в конце рабочего хода, необходимо долить масло через отверстие в крышке 5. Аналогично проводится настройка вертикальных и угловых перемещений. Настройка вертикальных перемещений робота Подвижным упором 13 (см. рис. 3) установить требуемую величину вертикальных перемещений. Затем необходимо завернуть иглу 10 до отказа. Повернуть гильзу 9 до упора. Подать под рабочим давлением воздух, при этом механизм подъема займет верхнее (исходное) положение. Регулировочным винтом 14 произвести точную подстройку. Затем с клавиатуры микроконтроллера подать команду на перемещение механизма, т.е. включить механизм подъема (см. табл. 5). Механизм займет нижнее положение. Произвести точную регулировку винтом нижнего положения. Регулировка датчика D1 (см.рис. 2) верхнего положения осуществляется перемещением упора 12. Расстояние «S» равное 2-3 мм между датчиком D0 нижнего положения (см. рис. 2) и втулкой 7, устанавливается передвижением последней. Поворотом гильзы 9 (см. рис. 3) и иглы 10 настраивают скорость подъема таким образом, чтобы время перемещения оказалось минимальным, а движение заканчивалось плавно, без ударов. Так как опускание робота производится под собственным весом, то регулирование скорости опускания производят дросселем ДР5 (см. рис. 6), добиваясь минимального времени и плавного завершения движения. Настройка угловых перемещений робота Перемещая подвижные упоры 12 (см. рис. 3) по пазам фланца 2 стойки 3 настроить необходимый угол поворота. Завернуть иглу 5 (см. рис. 4) до отказа, повернуть поворотное кольцо 7 до упора. Регулировочные винты 9 завернуть таким образом, чтобы шток-поршень 6 демпфера совершал полный ход при повороте руки робота на настроенный угол поворота. Подать под давлением воздух, при этом рука робота должна быть повернута по часовой стрелке (исходное положение). Регулировочным винтом 15 (см. рис. 3) произвести точную подстройку исходного положения. Затем с клавиатуры микроконтроллера подать команду на поворот руки робота, т.е. включить механизм поворота руки робота (см. табл. 2). Рука робота повернется против часовой стрелки. Регулировочным винтом 15 произвести точную подстройку угла поворота. Произвести точную настройку хода шток-поршня 6 регулировочными винтами 9 (см. рис. 4). При этом упор патрона 1 (см. рис. 3) должен упираться в регулировочные винты 15 упоров 12. Затем завернуть регулировочные винты 9 (см. рис. 4) на 1-2 оборота и зафиксировать положение винтов 9 контргайками. Скорость торможения настраивают вращением поворотного кольца 7 и иглы 5. Скорости поворота настраиваются дросселями ДР1, ДР2.
Порядок выполнения лабораторной работы 1. Изучить конструкцию и технические характеристики промышленного робота ЦПР – 1П. 2. Изучить методику подготовки робота к работе. 3. Произвести регулировку робота.
Контрольные вопросы
1. Какое назначение промышленного робота ЦПР-1П и какие его основные технические характеристики? 2. Какие основные механизмы робота? 3. Как работает механизм подъема (поворота или горизонтальных перемещений)? 4. Как работает пневматическая система робота? 5. Какая система управления и что обеспечивает управление роботом? 6. Как осуществляется подготовка робота к работе и его регулировка? Лабораторная работа № 4
Микроконтроллер программируемый МКП-1 Цель: изучение технических характеристик микроконтроллера программируемого МКП-1, его устройства, системы команд управления, рекомендаций по программированию и приобретение практических навыков по разработке управляющих программ для промышленного робота ЦПР-1П.
Микроконтроллер программируемый МКП-1 (в дальнейшем микро-контроллер) предназначен для циклового двухпозиционного управления манипулятором промышленного робота и технологическим оборудованием. Областью наиболее эффективного применения микроконтроллера является управление роботизированными технологическими комплексами и автоматическими линиями при автоматизации технологических процессов в условиях серийного и мелкосерийного производства, когда требуется развитое программно-логическое управление, оперативная смена управляющих программ, и использование стандартных средств вычислительной техники экономически нецелесообразно ввиду их высокой стоимости и сложности обслуживания.
Технические характеристики
1. Тип управления: · цикловой (по временному, путевому или совмещенному принципам); · программно-логический. 2. Программируемые функции: · управление выходами на исполнительные устройства; · прием информации, поступающей от датчиков состояния обору-дования; · формирование выдержки времени; · организация условных и безусловных переходов по программе; · связь с управляющим комплексом высшего ранга по интерфейсу последовательной передачи информации. 3. Сервисные функции: · редактирование программ; · тестовый контроль модулей; · контроль рабочих программ. 4. Режимы работы: · автоматическое управление (по управляющей программе, записанной в память); · ручное управление (управление по командам, поданным с пульта управления); · пошаговое выполнение программы; · просмотр программы (вывод на дисплей содержимого памяти рабочих программ). 5. Ввод и отладка программ, управление режимами работы с клавиатуры пульта управления 6. Дискретность задания выдержки времени, с 0, 1 7. Нароботка на отказ не менее, ч 5000 8. Питание от сеть переменного тока напряжением, В 220 9. Потребляемая мощность не более, Вт 60 10. Габаритные размеры, мм, не более длина х ширина х высота 440х275х170 11. Масса не более, кг 50
Устройство микроконтроллера Основными узлами микроконтроллера (рис. 1) являются: · корпус; · пульт управления; · функциональные модули; · модули источника питания; · сетевой фильтр. На передней панели микроконтроллера расположены все необходимые органы управления и индикации: · выключатель «СЕТЬ»; · индикатор напряжения питания сети и предохранители; · индикаторы наличия напряжения вторичных стабилизированных источников питания +5, +12, -5 В и энергонезависимого питания для модуля энергонезависимого запоминающего устройства (МЭНЗУ);
Рис. 1. Микроконтроллер МКП-1: а – лицевая сторона, б – обратная сторона
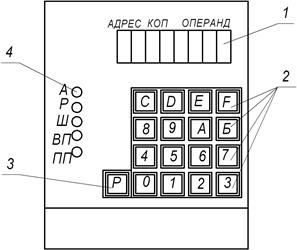
· индикаторы входов и выходов микроконтроллера; · индикатор «ОЖ», включенное состояние которого сигнализирует оператору о том, что микроконтроллер находится в режиме ожидания ввода информации с клавиатуры пульта управления; · пульт управления. На задней панели закреплен сетевой фильтр и шесть розеток соединителей типа РП15-32 (00–0F, 10–1F, 20–2F), предназначенные для подключения внешнего оборудования и датчиков. В составе микроконтроллера можно выделить: · модуль процессора (МПР); · систему памяти; · систему ввода-вывода, обеспечивающую с помощью соответ-ствующих модулей связь МПР с пультом управления, управляющей ЭВМ высшего ранга и внешним технологическим оборудованием; · систему электропитания. Модуль процессора выполнен на БИС КР580ИР80, осуществляет сбор, цифровую обработку и вывод информации в соответствии с исполнительной программой, записанной в перепрограммируемое постоянное запоминающее устройство (ПЗУ) модуля памяти (МП). Исполнительная программа является неотъемлемой частью микро-контроллера, недоступной для пользователя. Ее назначение – преобразование инструкций, введенных оператором с пульта управления (ПУ) или посту-пающих от управляющей программы, в последовательность кодов машинного языка микроконтроллера, реализующих эти инструкции. Управляющая программа (УП) – программа, написанная пользователем в кодах входного языка микроконтроллера и обеспечивающая выполнение заданного алгоритма управления внешним оборудованием. Она размещается вмодулях энергонезависимого запоминающего устройства и сохраняется при отключении первичного питания микроконтроллера благодаря использованию автономного электропитания. Пульт управления (ПУ) (рис.8) совместно с модулем управления (МУ) составляет технические средства общения оператора с микроконтроллером. ПУ включает в себя клавиатуру для ввода команд и управления режимом работы микроконтроллера, 8-разрядный однострочный дисплей и индикаторы режимов работы.
Рис.8. Пульт управления: 1- дисплей; 2 – клавиатура; 3 – индикаторы режимов работы; 4 – клавиша режимов работы Модуль ввода (МВВ) и вывода (МВЫВ) дискретных сигналов пред-назначен для связи микроконтроллера с внешним технологическим оборудованием (исполнительными устройствами, датчиками состояния оборудования, реле и т.п.). Модуль последовательного интерфейса (МПИ) предназначен для обмена информацией между микроконтроллером и ЭВМ высшего ранга в автоматической системе управления технологическим процессом. Система электропитания микроконтроллера преобразует первичное напряжение питающей сети во вторичное стабилизированное напряжение, необходимое для питания его модулей.
Режимы работы В каждый текущий момент микроконтроллер может находиться в одном из пяти режимов работы: · автоматическом, · ручном, · пошаговом, · ввода программы, · просмотра программ, отображаемых на ПУ светодиодами А, Р, Ш, ВП, ПП. Режим “Ввод программы” используется для записи кодов команд управляющей программы в энергонезависимое запоминающее устройство (ЭНЗУ). Необходимая команда набирается оператором на клавиатуре ПУ. Процессор под управлением исполнительной программы считывает коды нажатых клавиш, формирует из них код команды и пересылает его в ЭНЗУ по адресу, определяемому счетчиком команд, который размещен в оперативном запоминающем устройстве (ОЗУ) МП. По окончании пересылки каждой команды содержимое счетчика команд увеличивается на единицу. Вводимая информация совместно с текущим значением счетчика команд отображается на дисплее. Структура режима “Просмотр программы” аналогична режиму “Ввод программы”, однако направление прохождения информации противоположно. В соответствии с адресом ячейки ЭНЗУ, записанной в счетчике команд, процессор производит считывание содержащейся в этой ячейке информации и выводит ее на дисплей совместно с текущими значениями счетчика команд. Содержимое счетчика команд модифицируется и процессор переходит в режим ожидания нажатия клавиши, воспринимаемого им как команда вывода на дисплей содержимого очередной ячейки ЭНЗУ. В режиме управления “Ручной” процессор взаимодействует с ПУ аналогично режиму “Ввод программы”, однако сформированный код команды не записывается в ЭНЗУ, а выполняется. “Автоматический” режим работы является основным и предназначен для управления технологическим оборудованием в соответствии с управляющей программой, записанной в ЭНЗУ. В этом режиме клавиатура для ввода кодов команд заблокирована. “Пошаговый” режим используется при отладке УП, в котором процессор осуществляет выборку из ОЗУ и выполнение очередной команды, после чего изменяет содержимое счетчика команд и переходит в режим ожидания ввода с клавиатуры. Каждое нажатие клавиши иницирует процессор на выполнение очередного шага программы. В паузах между выполнением команд процессор выводит на дисплей адрес и содержимое ячейки ЭНЗУ, хранящей команду, которая будет выполняться на следующем шаге. |
Последнее изменение этой страницы: 2017-05-05; Просмотров: 975; Нарушение авторского права страницы