|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Механизмы и элементы конструкций ПР. Типы механизмов, определяющих конструктивное исполнение.
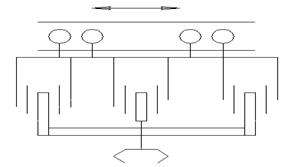
1. Требования к конструкции ПР формируется исходя из: · желаемых размеров, формы и расположения рабочей зоны; · обеспечения необходимой точности позиционирования; · максимальной скорости и ускорения; · жесткости звеньев манипулятора; · наименьший вес при заданной грузоподъемности; 2. Эксплуатационные требования: · ремонтопригодность; · удобство обслуживания · вид энергоносителя · потребляемая мощность · стоимость · надежность функционирования · защита от агрессивной среды · надо учесть особенности ЗУ, их сменяемость, способы крепления рабочего инструмента · возможность работы со средствами очувствления при использовании адаптивного управления 3. Требования к СУ ПР В конструкцию ПР входят: 1. узлы и система управления 2. датчики обратной связи по положению и по скорости 3. датчики усилия, например, при автоматизации сборочных операций. 4. Микро ЭВМ или микропроцессор в отдельной стойке Все многообразие механизмов, образующих конструкцию ПР, можно свести к трем типам (по типу их кинематики): 1. телескопические (стреловидные) 2. шарнирные (шарнирно-сочлененные) 3. параллелограмные 1. Это трубчатая или коробчатая конструкция, сообщающая поступательное перемещение прикрепленному к ней исполнительному устройству. 2. это шарнирный многозвенчатый механизм с открытой многозвенчатой цепью, но чаще применяется в сочетании с телескопической ручкой. 3. в виде параллелограмного механизма, дающего поступательное движение. Часто используется в конструкции манипуляторов с ручным управлением (сбалансированные погрузчики)
1 2
3 4 5 6 7
8 9 10
1 – напольно-стреловая; 2 – тельферно-стреловая; 3 – мостово-стреловая; 4 – портально-стреловая; 5 – напольно-шарнирно-стреловая; 6 – портально-шарнирно-стреловая; 7 – напольно-шарнирная; 8 – тельферно-шарнирная; 9 – мосто-шарнирная; 10 – портально-шарнирная
Рисунок 35 – Конструктивно-компоновочные схемы исполнения ПР 9. Транспортно-накопительная система (ТНС) как координатор материальных потоков в ГАП. Разновидности ТНС.
Основные виды и функции ТНС. 1. Автоматизация транспортных операций при передаче деталей в пределах участка или цеха. 2. Управление материальным потоком заготовок, материалов, деталей, изделий. 3. Подача деталей непосредственно в зону обработки и отвод деталей из зоны обработки. 4. Подача комплектов инструмента с автоматизированного центрального склада или с участков его восстановления и заточки. 5. Удаление стружки с зоны резания и от станков. Перечисленные функции приводят к тому, что стоимость ТНС может достигать 30...40% стоимости всей ГПС. На примере ГПС механической обработки и сборки можно построить следующую структурную формулу ТНС. В связи с материальными потоками, действующими в данном производстве, которые будут зависеть по своей интенсивности, протяженности, номенклатуре от вида данного производства, все ТНС подразделяются на 3 разновидности: 1 – конвейерные ТНС (типа рольганги или конвейеры). 2 – подвесные ТНС (монорельсовый транспорт, подвесные конвейеры, а также подвесные транспортные роботы). 3 – напольный транспорт (рельсовые тележки, индуктивно управляемые тележки “робокары”). Последний вид ТНС является перспективным и рекомендуется при проектировании нового производства (т.к. необходимы большие площади).
Рисунок 36 – Структура ТНС для ГПС механообработки и сборки 1. Конвейерные. Достоинства: простые по конструкции, их использование наиболее целесообразно в ГАЛ. Они обеспечивают надежное транспортирование деталей по прямолинейному и неизменному маршруту. Недостатки: ограниченная маршрутная гибкость, занимается полезная производственная площадь. 2. Подвесные. Обеспечивают связь между станками какого-либо участка со складом заготовок и деталей и дополнительными постами, а также осуществляют связь со смежными участками. Достоинства: обеспечивают изменение маршрута движения (ограниченно, т.к. тележки движутся по монорельсу и вариантов движения сравнительно немного). Недостатки: транспорт ограничен по грузоподъемности. 3. Напольный транспорт (робокар). Достоинства: широкие возможности по изменению маршрута движения, причем маршрут выбирается в автоматическом режиме от управляющей ЭВМ данного участка; достаточно высокая грузоподъемность (до 2 т полезного груза); высокая точность позиционирования (в пределах 1 мм); кроме транспортировки возможна работа в качестве загрузочного устройства.
10. Напольный транспорт. Устройство и принцип действия индуктивно управляемой автономной транспортной тележки (робокара). Виды компоновок оборудования ГПС и связь их с траекторией движения робокара.
В настоящее время в условиях гибкого производства находит применение новый вид транспорта – напольный. В качестве примера этого транспорта рассмотрим устройство и принцип действия индуктивной тележки “робокар”. Схематично робокар выглядит так.
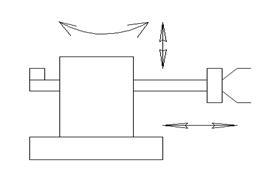
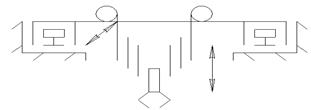
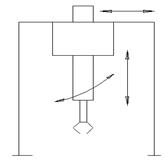
Рисунок 37 – Индуктивно-управляемая транспортная тележка “Робокар”
1 – платформа с ходовой частью и рулевым управлением на передние колеса; 2 – система управления тележки; 3 – дисплей для ввода программы манипулятора; 4 – рабочий стол для размещения полезного груза; 5 – автономный блок питания; 6 – двигатель привода колес; 7 – манипулятор, предназначенный для загрузки и разгрузки рабочего стола.
В случае необходимости манипулятор может грузить детали непосредственно на станок. Как вариант тележка может быть без манипулятора, тогда детали со стола грузят на приемопередающее устройство у станка.
Тележка движется по заданному маршруту, который обозначается в виде кабеля, проложенного в полу цеха в пазу глубиной 20 мм, шириной 8...10 мм сверху эпоксидная смола. По кабелю идет ток высокой частоты 30...32 кГц, благодаря этому вокруг оси кабеля образуется круговое магнитное поле. Напряженность этого поля уменьшается с расстоянием от оси кабеля, а тележка снабжена двумя датчиками Д1 и Д2 (индуктивного типа). Первоначально тележка запущена вдоль оси кабеля, т.к. пол грязный и неровный тележка начинает уходить в ту или иную стороны оси кабеля, при этом один из датчиков будет входить, а другой выходить из более плотных слоев магнитного поля. В результате этого на одном из датчиков образуется дополнительная ЭДС и возникает сигнал рассогласования. Он подается на рулевое управление, которое разворачивает тележку в противоположном направлении. Т.о. тележка едет по некоторой ломанной линии относительно оси кабеля. Благодаря высокому быстродействию системы управления, амплитуда составляет не более 1 мм. Выбор маршрута движения обеспечивается включением отдельных секций кабеля, по программе, которую задает центральная ЭВМ. Например, для движения по маршруту №2 секции 1 и 3 должны быть обесточены.
Появление тележек-робокаров вызвало и появление новых видов компоновки автоматизированного оборудования на участке. Они приведены в таком виде.
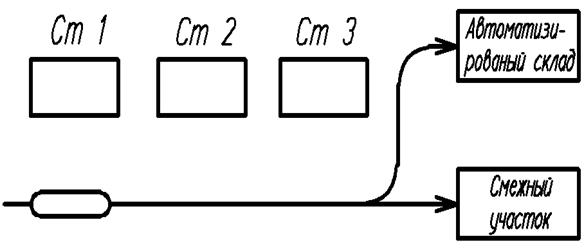
Рисунок 38 – Продольная компоновка (ГАЛ).
Рисунок 39 – Поперечная компоновка (ГАУ).
Рисунок 40 – Диагональная компоновка расположения оборудования
Применяется в условиях ограниченности производственных площадей и наличия препятствий для робокара. В этом случае включается реверс тележки робокара.
Рисунок 41 – Кольцевая компоновка.
|
Последнее изменение этой страницы: 2017-05-05; Просмотров: 633; Нарушение авторского права страницы