|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Виды и назначение маршрутов ОВД. Навигация на маршрутах ОВДСтр 1 из 11Следующая ⇒
Введение Методические рекомендации по созданию маршрутов обслуживания воздушного движения (далее - методические рекомендации) основаны на требованиях и рекомендациях, приведенных в документах Международной организации гражданской авиации (ICAO), Европейской организации по безопасности аэронавигации (EUROCONTROL), Радиотехнической комиссии по аэронавигации (RTCA), авиационных правилах и квалификационных требованиях Межгосударственного авиационного комитета (МАК), Федеральных правилах использования воздушного пространства Российской Федерации и отражают сложившуюся международную и отечественную авиационную практику, перспективы внедрения в Российской Федерации новых технических средств и методов навигации и обслуживания воздушного движения (далее - ОВД), современных подходов к организации воздушного движения. Первый раздел методических рекомендаций содержит классификацию маршрутов ОВД, описывает общие принципы и критерии, а также факторы, учитываемые при их создании. В разделе приведены необходимые сведения о навигации на обычных маршрутах и маршрутах зональной навигации. Второй раздел описывает порядок создания маршрутов ОВД. Приложения к методическим рекомендациям включают в себя инструктивный и информационный материал, поясняющий их применение при создании маршрутов ОВД. 1. Общие положения Примечание. В отличие от маршрутов ОВД и процедур полета в районе аэродрома, при полетах во внеаэродромном пространстве радиолокационное наведение (векторение) не используется. Радиолокационный контроль осуществляется только в целях ОВД для эшелонирования и предотвращения отклонений ВС за допустимые пределы. Бортовой вычислитель, определяющий величину отклонения ВС от ЛЗП, а также навигационные средства, с помощью которых определяется местоположение ВС, составляют оборудование зональной навигации (оборудование RNAV). В качестве датчиков для оборудования зональной навигации могут использоваться образующие угломерно-дальномерную систему радиомаяки VOR/DME, система из двух дальномерных радиомаяков DME/DME, инерциальные навигационные системы (далее - ИНС), разностно-дальномерные системы LORAN-C (РСДН-10) и спутниковые навигационные системы (GNSS). В бортовой базе аэронавигационных данных содержится информация о геодезических координатах точек пути, а также о координатах наземных радиомаяков (если они используются в данном виде оборудования RNAV). Для зональной навигации, основанной на VOR/DME (или DME/DME), бортовое оборудование RNAV включает в себя вычислитель, который по измеренным значениям пеленга от VOR и дальности от DME (или дальностей до двух радиомаяков DME) и координатам радиомаяков рассчитывает широту и долготу местоположения ВС, а затем с использованием координат точек пути определяет величину отклонения ВС от ЛЗП и другие навигационные параметры (оставшееся расстояние, время, фактический путевой угол и т.п.). Рассчитанное отклонение от ЛЗП индицируется на приборе пилота в виде отклонения вертикальной планки от центра прибора, а также может использоваться для автоматического управления полетом. Для прочих видов оборудования RNAV (LORAN-C, ИНС, GNSS) специальный вычислитель не требуется, поскольку он имеется в составе этих систем. Наиболее перспективным и эффективным оборудованием зональной навигации являются спутниковые навигационные системы (CPS NAVSTAR, ГЛОНАСС и в перспективе GALILEO). Они обеспечивают точное определение координат ВС, его скорости и точного времени над всей территорией земного шара. Бортовое оборудование этих систем имеет обновляемую аэронавигационную базу данных и реализует функции, необходимые для зональной навигации в условиях действия требуемых навигационных характеристик (RNP) в системе CNC/ATM. Точность навигации Точность навигации является одним из основных факторов, определяющих безопасность полетов с точки зрения предотвращения столкновений ВС как друг с другом, так и с препятствиями. Применительно к горизонтальной плоскости под точностью навигации понимается степень приближения линии фактического пути (далее - ЛФП) к линии заданного пути. ЛФП не совпадает с ЛЗП вследствие погрешностей навигационных измерений, погрешностей пилотирования, влияния внешней среды и человеческого фактора. Поскольку на обычных маршрутах (не зональной навигации) выдерживание ЛЗП осуществляется с помощью средств наведения ОПРС, VOR, точность навигации зависит от точности измерения пеленга ВС с помощью этих угломерных средств и точности пилотирования. Очевидно, что одной и той же угловой погрешности выдерживания ЛЗП соответствуют различные линейные уклонения. Линейные уклонения возрастают по мере удаления от средства наведения. В международной практике принят подход, при котором требования к точности навигации выражаются в виде защищенного воздушного пространства (далее - ЗВП), размеры которого определяются реально достижимой точностью наведения на данном маршруте с учетом расположения наземных радиотехнических средств (далее - РТС), конфигурации маршрута и других факторов. При этом само требование выдерживания ЗВП носит вероятностный характер и по общепринятой мировой практике эквивалентно тому, что вероятность нахождения ВС в пределах коридора составляет не менее Р = 0,95 (ВС находится в пределах установленного коридора не менее 95% времени на любом участке полета). Примечание. В полярных районах допускается ориентация радиомаяка по истинному меридиану. В международной и отечественной практике общепринятой для таких радиомаяков является аббревиатура VOR (Very high frequency Omni-directional Range). Используются совместно с бортовым оборудованием, принимающим сигналы радиомаяка, для наведения при полете на или от VOR. Могут быть использованы для задания контрольных точек и фиксирования их пролета. После установки направления нулевого пеленга радиомаяка по северному направлению магнитного меридиана угол между истинным (географическим) меридианом и линией нулевого пеленга (declination) остается постоянным, несмотря на вековой ход магнитного склонения. Соответственно сохраняются постоянными и радиалы, задающие направления ЛЗП.
Применение VOR в международной практике с 2010 г. начнет сокращаться, но планируется, по крайней мере, до 2020 г.
Отдельная приводная радиостанция обеспечивает наведение по ЛЗП, проходящей через ОПРС, и фиксирование пролета точки ее установки. В международной практике для данного средства используется аббревиатура NDB (Non-Directional Beacon). Используется совместно с бортовым автоматическим радиокомпасом (зарубежный аналог ADF - Automatic Direction Finder) и курсовыми приборами. Точность определения пеленга зависит от точностей наземного оборудования, бортового радиокомпаса, а также курсового прибора (компаса).
Ввиду невысокой точности и других недостатков данного средства, применение ОПРС (NDB) для аэронавигации в международной практике с 2005 г. сокращается и, как планируется, прекратится к 2015 г.
Всенаправленный дальномерный радиомаяк диапазона УВЧ предназначен для измерения дальности воздушного судна относительно места установки радиомаяка при полетах воздушных судов по трассам и в районе аэродрома. В международной и отечественной практике общепринятой для таких радиомаяков является аббревиатура DME (Distance Measurement Equipment). С помощью DME могут задаваться контрольные точки на обычных маршрутах ОВД.
Точность определения пеленга и дальности зависит от точности наземного оборудования (радиомаяка), точности бортового оборудования, а для VOR также от точности предполетной проверки бортового оборудования.
Точность характеризуется величиной погрешности, соответствующей вероятности Р = 0,95 (удвоенная средняя квадратическая погрешность).
Влияние внешней среды
При выдерживании постоянной приборной скорости истинная воздушная скорость зависит от температуры воздуха на высоте полета. Следовательно, различным будет и радиус разворота. Чем выше температура, тем больше путевая скорость. При построении зон учета препятствий для определения минимальной безопасной высоты полета при расчете истинной скорости принимается температура воздуха, которая на 15° превышает температуру на расчетной высоте полета в стандартной атмосфере (информация для расчета истинной скорости приведена в Приложении 1 к Методическим рекомендациям).
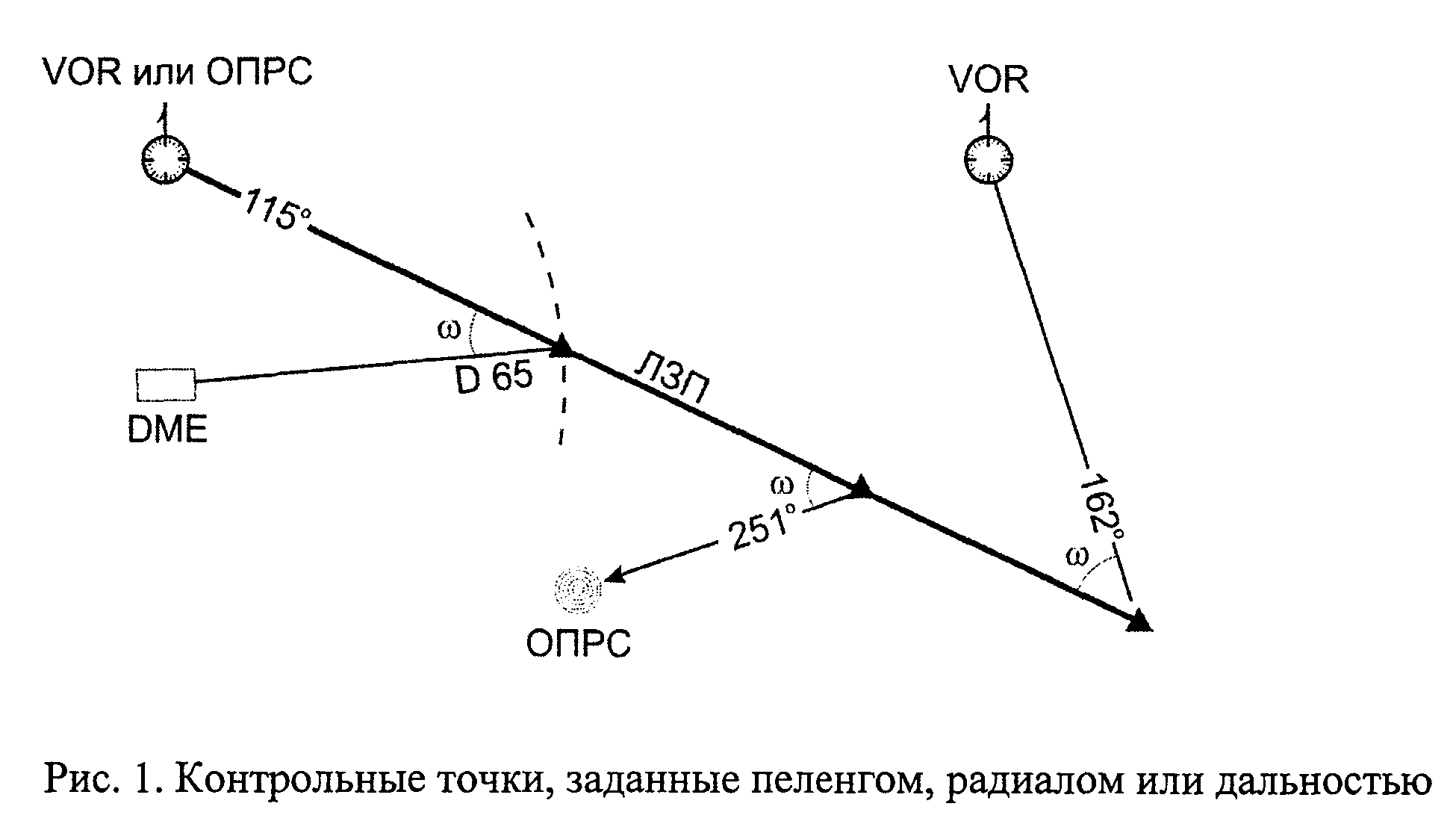
Во время разворота экипаж не имеет возможности компенсировать влияние ветра, который может отнести ВС от заданной траектории разворота в сторону препятствий. Поэтому при построении границы зоны учета препятствий в районе разворота (вблизи ППМ) учитываются "худшие" направление и скорость ветра. Исходные данные, используемые при создании маршрута ОВД Аэронавигационная информация: > данные навигационных средств (VOR, ОПРС, DME), расположенных в районе предполагаемого прохождения маршрута (координаты, частота, позывной, режим работы); > магнитное склонение в районе прохождения маршрута; > информация о других маршрутах ОВД, проходящих в данном районе; > информация о зонах ограничений полетов в данном районе; > расположение границ районов управления воздушным движением (секторов, районов полетной информации); > расположение аэродромов в данном районе, горизонтальные и вертикальные границы районов аэродромов, расположение стандартных маршрутов вылета (SID) и прибытия (STAR). Информация об интенсивности полетов на существующих в данном районе маршрутах ОВД. Информация о рельефе местности, необходимая для создания маршрутов ОВД в нижнем воздушном пространстве. Информация об искусственных препятствиях (для создания маршрутов ОВД в нижнем воздушном пространстве). Примечания. Маркерный радиомаяк (МРМ) сам по себе не может задавать КТ, поскольку обеспечивает фиксирование его пролета, но не обеспечивает наведение. Но он может использоваться как КТ для фиксирования пролета при условии, что наведение обеспечивается другим навигационным средством. Дальномерный радиомаяк (DME) не обеспечивает наведение по ЛЗП, проходящей через точку его установки. Он может обеспечивать наведение по ЛЗП в форме окружности с центром в точке расположения радиомаяка. Такие ЛЗП могут использоваться только в районе аэродрома на маршрутах вылета, прибытия и захода на посадку. 2. Контрольные точки, заданные пеленгом (радиалом) от бокового угломерного средства при полете по ЛЗП, наведение по которой обеспечивается другим навигационным средством. Если на ЛЗП, проходящей на/от навигационного угломерного средства (VOR или ОПРС) необходимо установить КТ, то на маршрутной карте публикуется пеленг (радиал) от другого средства (VOR или ОПРС), расположенного в стороне от ЛЗП (рис.1). В этом случае наведение будет обеспечиваться первым средством, а момент пролета фиксируется экипажем по достижению опубликованного пеленга (радиала) от второго средства. Термин "радиал" используется применительно к VOR и обозначает магнитный пеленг КТ, измеренный от меридиана радиомаяка. В этом случае на маршрутной карте публикуется радиал от радиомаяка. Если в качестве бокового навигационного средства используется ОПРС, публикуется магнитный пеленг на ОПРС, измеренный от меридиана КТ.
Минимально допустимое значение угла ω между ЛЗП и линией пеленга зависит от типа и удаления D бокового навигационного средства и может быть определено по графику, приведенному на рис. 2.
Для контрольных точек, которые не являются поворотными пунктами маршрута (ЛЗП в них не меняет направления), а используются в целях ОВД как пункты донесения, допускается отступление от данных значений. Однако следует учитывать, что при углах между ЛЗП и линией пеленга менее минимальных, приведенных на рис. 2, значительно возрастает погрешность фиксирования пролета контрольной точки.
3. Контрольные точки, заданные дальностью от наземного дальномерного средства (DME) при полете по ЛЗП, наведение по которой обеспечивается другим навигационным средством.
Аналогично предыдущему случаю, наведение осуществляется с помощью VOR или ОПРС, расположенных на ЛЗП. Фиксирование пролета осуществляется по достижении фактической дальностью значения, опубликованного на маршрутной карте. Дальномерный радиомаяк может располагаться на ЛЗП (например, VOR совмещен с DME) или находиться в стороне от ЛЗП. При боковом расположении радиомаяка угол между ЛЗП и линией, соединяющей КТ с радиомаяком, не может превышать 23°, а дальность до КТ - по возможности меньше.
Примечание.
Пример задания пунктов маршрута приведен в Приложении 2 настоящих Методических рекомендаций.
Рекомендации к конфигурации маршрута
Зоны, в которых пересекаются маршруты ОВД, являются потенциально опасными. Следует сводить к минимуму число пересечений маршрутов, особенно предназначенных для основных потоков движения. При этом рекомендуется, по возможности, избегать точек пересечения пар маршрутов, создаваемых для встречных потоков воздушного движения. Точки пересечения целесообразно располагать в пределах зон радиолокационного контроля.
Не следует допускать образования конфликтных точек вблизи границы сектора для входящего движения, которое влечет увеличение рабочей нагрузки в связи с чрезмерным объемом координационной деятельности. Зоны пересечения не должны вступать в конфликт с маршрутами набора высоты или снижения в крупных аэропортах.
Через точки пересечения (схождения) маршрутов рекомендуется прокладывать не более двух маршрутов с высокой/средней плотностью движения и не более трех маршрутов с низкой плотностью.
Для маршрутов, сходящихся в точке расположения VOR, а также для маршрутов зональной навигации угол схождения целесообразно устанавливать не менее 15°. Для маршрутов, сходящихся в ОПРС - не менее 30°. Если хотя бы на одном из сходящихся маршрутов в точке схождения (пересечения) маршрутов отсутствует наведение - не менее 45°.
Рекомендуется устанавливать длину участков маршрута между контрольными точками, в которых изменяется его направление (ППМ), не менее 30 км в нижнем воздушном пространстве и не менее 50 км в верхнем воздушном пространстве.
Максимальная протяженность участков не ограничивается, но следует учитывать, что при их протяженности более 300-400 км на части участка будет отсутствовать наведение. Это приведет к увеличению размеров защищенного воздушного пространства и зоны учета препятствий, что, в свою очередь, повлечет увеличение минимальной безопасной высоты и может создать проблемы с отделением маршрута от других элементов структуры воздушного пространства.
Рекомендации по построению защищенного воздушного пространства
С каждым маршрутом ОВД связано свое защищенное воздушное пространство (ЗВП), которое может быть использовано для отделения данного маршрута от других элементов воздушного пространства (других маршрутов, зон ограничений и т.п.).
Размеры и конфигурация ЗВП на каждом участке маршрута в общем случае являются переменными и зависят от точности навигации, достижимой на данном участке. Поскольку погрешности выдерживания ЛЗП являются случайными, ЗВП строится для определенной вероятности нахождения ВС в его пределах.
Для каждого маршрута ОВД строится ЗВП для вероятности Р = 0,95. Это означает, что в пределах этого ЗВП ВС находится на протяжении не менее 95% времени полета. Для воздушных трасс ширина такого ЗВП является шириной воздушной трассы.
В некоторых случаях, например, для разделения маршрутов ОВД, рекомендуется строить ЗВП для вероятности Р = 0,995, которое имеет большие размеры.
ЗВП строится для каждого прямолинейного участка маршрута. В отдельных случаях строится дополнительное ЗВП в районе, в котором происходит изменение направления маршрута (в районе ППМ).
ЗВП учитывает возможности бортовых навигационных средств по выдерживанию ЛЗП без учета возможного наличия радиолокационного контроля.
Для построения ЗВП используется карта масштаба не мельче 1:2000000, предпочтительно масштаба 1:1000000 или крупнее.
Разделение маршрутов ОВД
Целью разделения маршрутов ОВД является обеспечение риска столкновений воздушных судов не более допустимого значения. Оценка риска для предполагаемой конфигурации и расположения маршрутов осуществляется с использованием математических моделей оценки риска столкновений, рекомендованных ИКАО и учитывающих достижимую точность аэронавигации, размеры и скорости ВС, интенсивность воздушного движения и многие другие факторы.
Вместе с тем ИКАО допускает планирование маршрутов на основе сравнения с эталонными системами. Это означает, что если в некотором районе уже была проведена оценка уровня безопасности полетов с использованием риска столкновений, показавшая возможность установления определенных норм разделения маршрутов ОВД (эталонная система), то такие же нормы могут быть приняты и в другом районе, если условия полетов в нем (навигационная инфраструктура, интенсивность движения и т.д.) не хуже, чем в эталонной системе.
В настоящем пункте приведены рекомендации, которые основаны на характеристиках эталонных систем, опубликованных в документах ИКАО.
Примечание.
Данные значения радиусов определены в соответствии с PANS OPS (Doc 8168 ICAO) для расчетных высот 2600 и 6300 м при температуре, превышающей на 15° стандартную температуру на данных высотах, по индикаторной земной скорости 585 км/ч для угла крена 15° и округлены в большую сторону до величины, кратной одному километру в час.
Для построения внешней границы зоны разворота из контрольной точки разворота (точка О на рис. 17) проводится прямая под углом 60° к направлению ЛЗП второго участка во внешнюю сторону разворота, и на ней откладывается расстояние Т (отрезок ОМ). От точки О по ЛЗП второго участка маршрута откладывается расстояние, равное удвоенному значению Т (отрезок ON). Полученная точка N соединяется с точкой М прямой, которая будет проходить под углом 30° к ЛЗП второго участка.
Из точки М проводится дуга окружности радиусом Т с центром в точке О до пересечения этой дуги с продолжением внешней границы буферной зоны первого участка маршрута.
Для участков маршрута, проходящих в местности с максимальной высотой рельефа (с учетом искусственных препятствий) не более 2000 м используется значение Т = 52 км. Для участков маршрута с более высоким рельефом используется значение Т = 68 км.
Для построения внутренней границы зоны разворота из точки К, лежащей на границе буферной зоны на внутренней стороне разворота проводится прямая под углом, равным половине угла разворота (α/2) до пересечения с внутренней границей буферной зоны второго участка маршрута. Такой же угол данная прямая будет составлять с направлением ЛЗП первого участка. Данная прямая является внутренней границей зоны разворота.
Построенная описанным образом зона учета препятствий на развороте используется для определения минимальной высоты полета на втором участке (на который выполняется разворот). Она является основной зоной, то есть используется запас высоты 600 м.
Если полеты на маршруте осуществляются в обоих направлениях, зона разворота строится для каждого направления полета. Препятствия, попадающие одновременно в каждую из этих двух зон, учитываются при определении минимальной высоты для обоих участков (рис. 18).
Системы координат
Геодезические координаты точек пути указываются в геодезической системе координат ПЗ-90.02.
Примечание.
Система координат ПЗ-90.02 с высокой точностью совпадает со всемирной геодезической системой координат WGS-84, в которой публикуются координаты точек в соответствии со Стандартами и Рекомендуемой практикой ИКАО.
При определении координат точек пути необходимо принимать во внимание, что на используемых в настоящее время картах применяется геодезическая система координат СК-42.
Примечание.
В настоящее время для использования в целях картографии принята геодезическая система координат СК-95 и начата работа по переизданию крупномасштабных карт в этой системе. Различие координат точек в СК-42 и СК-95 невозможно графически определить на картах тех масштабов, которые используются для аэронавигации на маршрутах во внеаэродромном пространстве.
Точки пути, как правило, являются объявленными точками, то есть, не привязаны непосредственно к объектам на земной поверхности (населенным пунктам, радиомаякам), а просто заданы указанием координат. В этом случае маршрут будет проходить над точками земной поверхности, соответствующими этим координатам в системе ПЗ-90.02. На картах в СК-42 (СК-95) эти точки будут иметь другие координаты, но графически определить это отличие на картах масштаба 1:500000 (в 1 см 5 км) и более мелкого масштаба невозможно.
Примечание.
На территории Российской Федерации расстояние между точками, имеющими одинаковые численные значения координат в СК-42 (СК-95) и ПЗ-90.02 (WGS-84), обычно не превышает 150 м, поэтому различие систем координат не является существенным для той точности, которая требуется для полетов по маршрутам ОВД во внеаэродромном пространстве.
Если точка пути установлена в точке пересечения маршрута зональной навигации с границей района ОВД (сектора, района полетной информации, района аэродрома и т.п.), то ее координаты могут быть определены по карте и также рассматриваться как заданные в ПЗ-90.02.
В случае, когда точка пути устанавливается в точке расположения навигационного средства, координаты этого средства определяются путем геодезической съемки в системе координат ПЗ-90.02 (WGS-84).
Примечания.
В установленных районах авиационных работ конкретные маршруты ОВД не устанавливаются и в настоящих Методических рекомендациях не рассматриваются.
При создании маршрутов для полетов по ПВП не учитывается возможное оснащение ВС приемниками спутниковых навигационных систем, поскольку они в данном случае рассматриваются как дополнительное средство навигации.
Создание маршрутов ОВД для полетов ниже нижнего эшелона имеет следующие особенности и отличия от создания маршрутов для полетов по ППП.
1. Наличие наведения по ЛЗП и, соответственно, обеспечивающих это наведение навигационных средств на маршруте ОВД, не является обязательным.
2. В случае, когда воздушное пространство ниже нижнего эшелона классифицировано как воздушное пространство классов Е, F или G, наличие радиосвязи не является обязательным.
3. Пункты маршрута устанавливаются в местах расположения характерных визуальных ориентиров, обнаружение и распознавание которых возможно с достаточного расстояния.
4. Рекомендуется устанавливать протяженность участков между пунктами маршрута, не превышающую 50-70 км.
5. В малоориентирной местности целесообразно прокладывать ЛЗП таким образом, чтобы большая ее часть проходила вблизи ориентиров, даже если это повлечет увеличение протяженности маршрута. Наиболее эффективно прокладывать ЛЗП вдоль линейных ориентиров (рек, дорог, береговой черты, трубопроводов и пр.).
6. Защищенное воздушное пространство для маршрутов ОВД, на которых выполняются только визуальные полеты, не строится. Примечание. Не следует отождествлять понятия точности и разрешения аэронавигационных данных. Точность характеризуется величиной погрешности (для вероятности Р = 0,95), возникающей при измерении (геодезической съемке) или вычислении элемента данных. Разрешение характеризует форму представления элемента данных. Разрешение может быть как выше, так и ниже точности.
Для каждого участка маршрута и каждого направления полета указываются заданные магнитные путевые углы (МПУнач), измеренные от северного направления магнитного меридиана, проходящего через начальный пункт участка. Если в этом пункте маршрута расположен VOR, обеспечивающий наведение по ЛЗП, то вместо заданного магнитного путевого угла указывается радиал от VOR, соответствующий нахождению ВС на ЛЗП.
Примечание.
Как правило, заданный радиал совпадает с МПУнач, но может отличаться от него, если магнитное склонение изменилось, а ориентация радиомаяка осталась прежней.
Заданные магнитные путевые углы определяются путем расчета истинных путевых углов ИПУнач и учета магнитного склонения.
МПУнач = ИПУнач – (±Δм)
где Δм - магнитное склонение в точке расположения пункта маршрута.
В полярных районах, где наблюдается большая скорость изменения магнитного склонения (вековой ход), допускается публикация ИПУнач с опубликованием информации об этом на маршрутной карте.
Заданные путевые углы публикуются с разрешением 1°.
Расстояния между пунктами маршрута (длина участков) рассчитываются по координатам пунктов маршрута и публикуются с разрешением 1 км.
Пеленги (радиалы) и дальности пунктов маршрута от навигационных средств, с помощью которых они заданы, публикуются на картах с разрешением соответственно 0,1° и 0,2 км. Если пункт задан с помощью VOR, то указывается магнитный пеленг от радиомаяка на пункт маршрута (радиал). Для его определения из истинного пеленга вычитается магнитное склонение в точке расположения радиомаяка.
Примечание.
Следует учитывать возможность того, что нулевой радиал VOR может не совпадать с северным направлением магнитного меридиана из-за изменения магнитного склонения.
Если пункт задан с помощью ОПРС, то указывается магнитный пеленг радиостанции от меридиана пункта маршрута. Для этого из рассчитанного истинного пеленга радиостанции вычитается магнитное склонение пункта маршрута.
Истинные путевые углы и пеленги, расстояния и дальности рассчитываются по геодезическим координатам точек по формулам, соответствующим геометрии земного эллипсоида. Для расчета могут быть использованы формулы, соответствующие методу Бесселя. Этот метод позволяет выполнить расчет с любой заданной точностью. Он требует применения вычислительной техники и соответствующего программного обеспечения, поскольку является итерационным и требует значительного объема вычислений.
Международные рекомендации, касающиеся необходимости вычислений на поверхности эллипсоида, относятся как к маршрутам во внеаэродромном пространстве, так и к заданным траекториям в районе аэродрома. В то же время, в большинстве случаев методы расчета расстояний и направлений на поверхности сферы также обеспечивают точность, удовлетворяющую приведенным выше требованиям к разрешению путевых углов, пеленгов и расстояний для маршрутов во внеаэродромном пространстве. Метод В.В. Каврайского позволяет определять направления (путевые углы, пеленги) с погрешностью, не превышающей 0,1°, а расстояния - с погрешностью, не превышающей 0,08% от рассчитываемого расстояния. Это означает, что погрешность по расстоянию (дальности) не превысит 0,2 км при расстояниях до 250 км и не превысит 1 км при расстояниях до 1250 км. В связи с этим при создании маршрутов ОВД во внеаэродромном пространстве следует считать допустимым выполнение расчета расстояний и направлений по формулам сферической тригонометрии. Методика расчета приведена в Приложении 4 настоящих Методических рекомендаций.
Приложение N 1 к пункту 1.6 Методических рекомендаций Воздушного движения
Приложение N 2 к пункту 2.3 Методических рекомендаций Воздушного движения
Пример задания пунктов маршрута
В целях иллюстрации способов задания пунктов маршрута на рис. 1 представлен пример гипотетического маршрута.
В исходном пункте маршрута находится VOR с позывным TRK.
Примечание.
Для пунктов маршрута, маркированных навигационным средством, позывной средства является обозначением данного пункта, используемым в бортовых базах аэронавигационных данных и при составлении плана полета.
Наведение на первом участке маршрута обеспечивается с помощью VOR TRK путем задания радиала 46° (заданного магнитного пеленга самолета от VOR). На первом участке маршрута (TRK-POLKA) этот радиал совпадает с заданным магнитным путевым углом участка.
Следующий пункт маршрута POLKA является немаркированной контрольной точкой. В этом пункте ортодромическая ЛЗП, проходящая от TRK до DEDOK, не меняет своего направления. Данный пункт маршрута не задает ЛЗП, а используется как пункт донесения (например, точка пересечения с другим маршрутом, пересечение с границей района ОВД и т.п.). Контрольная точка POLKA задана способом пересечения радиала 93° от VOR NTK, расположенного в стороне от ЛЗП. Угол между линией пеленга (радиала) и ЛЗП составляет 47°. Следовательно, удаление VOR от контрольной точки не должно превышать 85 км (рис. 2 настоящих Методических рекомендаций).
В пункте POLKA заданный магнитный путевой угол (начальный магнитный путевой угол участка) изменяется вследствие угла схождения меридианов и изменения магнитного склонения, и составляет 47°. Но наведение по-прежнему осуществляется по радиалу 46° от VOR TRK, поскольку пеленг, получаемый с помощью VOR, измеряется от меридиана радиомаяка.
Первым поворотным пунктом маршрута, в котором он меняет свое направление, является немаркированная контрольная точка DEDOK. Она задана способом по пересечению магнитного пеленга 168° на ОПРС LK, расположенную в стороне от ЛЗП. Угол между ЛЗП и направлением пеленга составляет 59°, поэтому, в соответствии с графиком на рис. 2 настоящих Методических рекомендаций, удаление ОПРС от DEDOK должно быть не более 77 км. Точка DEDOK не могла быть задана по пересечению пеленга на ОПРС VB, поскольку разность пеленга и заданного путевого угла составляет 43°, что меньше допустимого для ОПРС значения 45 (рис. 2 настоящих Методических рекомендаций).
На участках DEDOK-REGBI-VB наведение осуществляется с помощью ОПРС VB (полет на радиостанцию). В немаркированном пункте донесения REGBI ЛЗП не меняет направления. Этот пункт задан дальностью от ДМЕ, расположенного в стороне от ЛЗП (угол между ЛЗП и направлением на ДМЕ не должен превышать 23°).
На участках маршрута VB-KONUS-YNS наведение обеспечивается сначала при полете от ОПРС VB (заданный магнитный пеленг самолета 116°), а затем при полете на VOR YNS (заданный радиал, равный заданному путевому углу для полета от YNS к KONUS на рисунке не показан).
Немаркированный пункт маршрута KONUS (пункт донесения) задан дальностью от радиомаяка ДМЕ, совмещенного с радиомаяком VOR YNS.
Приложение N 3 к пункту 2.5 Методических рекомендаций Воздушного движения
Приложение N 4 к пункту 2.11 Методических рекомендаций Воздушного движения
Определения терминов Буферная зона учета препятствий - часть зоны учета препятствий, в которой применяется запас высоты над препятствиями, равный половине запаса высоты, установленного для основной зоны учета препятствий в данном районе полетов. Воздушная трасса - установленная для полетов воздушных судов часть воздушного пространства, ограниченная по высоте и ширине, обеспеченная средствами навигации и обслуживанием воздушного движения. Заданный путевой угол - угол в горизонтальной плоскости между направлением принятым за начало отсчета и ЛЗП. Защищенное воздушное пространство - воздушное пространство, выделенное для выполнения полетов по маршруту ОВД с учетом возможных отклонений ВС от ЛЗП и предназначенное для отделения данного маршрута ОВД от других элементов воздушного пространства. Зональная навигация - метод навигации, позволяющий воздушным судам выполнять полет по любой заданной траектории с использованием технических средств. Контрольная точка - точка, используемая в качестве пункта маршрута для задания обычных маршрутов ОВД, при полете на или от которой обеспечивается наведение и пролет которой экипаж имеет возможность зафиксировать с помощью бортовых средств. Линейное упреждение разворота - расстояние до ППМ, измеренное вдоль ЛЗП, на котором должен быть начат разворот на очередной участок маршрута для вписывания в ЛЗП этого участка. Линия заданного пути - проекция на земную поверхность заданной траектории полета. Линия фактического пути - проекция на земную поверхность фактической траектории полета. Маршрут зональной навигации - маршрут ОВД, установленный для ВС, которые могут применять зональную навигацию. Маршрут ОВД - общий термин, обозначающий маршрут, установленный для направления потоков движения в целях обеспечения обслуживания воздушного движения. Международная воздушная трасса - воздушная трасса, открытая для международных полетов. Местная воздушная линия - установленная для полетов воздушных судов на высотах ниже нижнего эшелона часть воздушного пространства, ограниченная по высоте и ширине, обеспеченная обслуживанием воздушного движения. Минимальная безопасная высота - наименьшая высота полета, обеспечивающая установленное значение запаса высоты над препятствиями, попадающими в установленную зону учета препятствий. Наведение - непрерывное наличие у экипажа (бортовой системы управления полетом) информации об отклонении ВС от заданной траектории. Навигационная инфраструктура - расположение и характеристики наземных радионавигационных средств, а также наличие возможности использовать информацию спутниковых навигационных систем. Обычные маршруты ОВД - маршруты ОВД, не являющиеся маршрутами зональной навигации, на которых наведение обеспечивается с помощью угломерных радионавигационных систем или путем визуальной ориентировки. Основная зона учета препятствий - часть зоны учета препятствий, в которой применяется полное значение запаса высоты над препятствиями, установленное для данного района полетов. Пеленг - угол в горизонтальной плоскости между направлением, принятым за начало отсчета и направлением на данную точку.
Пункт маршрута - точка, используемая для задания линии заданного пути маршрута ОВД.
Поворотный пункт маршрута - пункт маршрута, в котором ЛЗП меняет направление.
Создание маршрута ОВД - процесс формирования таких аэронавигационных данных маршрута ОВД, которые обеспечивают выполнение предъявляемых к нему требований.
Точка пути - точка, заданная геодезическими координатами и используемая как пункт маршрута для маршрутов зональной навигации.
Требуемые навигационные характеристики - требования к навигации, предъявляемые для выполнения полетов на данном маршруте или в данном районе. Введение Методические рекомендации по созданию маршрутов обслуживания воздушного движения (далее - методические рекомендации) основаны на требованиях и рекомендациях, приведенных в документах Международной организации гражданской авиации (ICAO), Европейской организации по безопасности аэронавигации (EUROCONTROL), Радиотехнической комиссии по аэронавигации (RTCA), авиационных правилах и квалификационных требованиях Межгосударственного авиационного комитета (МАК), Федеральных правилах использования воздушного пространства Российской Федерации и отражают сложившуюся международную и отечественную авиационную практику, перспективы внедрения в Российской Федерации новых технических средств и методов навигации и обслуживания воздушного движения (далее - ОВД), современных подходов к организации воздушного движения. Первый раздел методических рекомендаций содержит классификацию маршрутов ОВД, описывает общие принципы и критерии, а также факторы, учитываемые при их создании. В разделе приведены необходимые сведения о навигации на обычных маршрутах и маршрутах зональной навигации. Второй раздел описывает порядок создания маршрутов ОВД. Приложения к методическим рекомендациям включают в себя инструктивный и информационный материал, поясняющий их применение при создании маршрутов ОВД. 1. Общие положения Виды и назначение маршрутов ОВД. Навигация на маршрутах ОВД Маршрут ОВД представляет собой коридор в воздушном пространстве, осью которого является линия заданного пути (далее - ЛЗП). Маршрут ОВД может обозначать воздушную трассу, местную воздушную линию, маршрут полета вне трасс, маршруты вылета и прибытия и т.п. ЛЗП задается пунктами маршрута (далее - ПМ). ЛЗП между двумя смежными ПМ является ортодромией и называется участком маршрута. Пункты маршрута, в которых ЛЗП меняет свое направление, называются поворотными пунктами маршрута (далее - ППМ). Пункты маршрута, не являющиеся поворотными, могут устанавливаться для целей ОВД (пункты обязательного донесения, донесения по запросу и т.п.). ПМ может быть задан в виде контрольной точки (для обычных маршрутов) или точки пути (для маршрутов зональной навигации). Все ППМ во внеаэродромном воздушном пространстве являются точками облета (Fly-by), то есть разворот в ППМ выполняется с учетом линейного упреждения разворота (далее - ЛУР). ЛУР зависит от истинной воздушной скорости воздушного судна (далее - ВС), угла крена на развороте и угла разворота (разности заданных путевых углов смежных участков маршрута). Маршрут ОВД характеризуется его аэронавигационными данными, которые включают в себя: > обозначение маршрута (индекс); > геодезические координаты ПМ, их названия и индексы; > расстояния между ПМ; > заданные путевые углы по участкам маршрута; > значения навигационных параметров (радиалов, пеленгов, дальностей), необходимых для наведения по ЛЗП и фиксирования пролета ПМ (для обычных маршрутов); > минимальную безопасную высоту полета (для маршрутов в нижнем воздушном пространстве); > другие данные (при необходимости). Для выдерживания ЛЗП в полете обеспечивается навигационное наведение по линии заданного пути (далее - наведение). Под наведением понимается непрерывное наличие у экипажа (автоматической системы управления полетом) информации об отклонении ВС от заданной траектории (в горизонтальной плоскости - об отклонении от ЛЗП). На основе этой информации вырабатываются команды управления, обеспечивающие вывод ВС на заданную траекторию. В традиционной (обычной) навигации наведение обеспечивают наземные угломерные средства, и поэтому маршруты проходят через азимутальные радиомаяки (VOR) и отдельные приводные радиостанции (ОПРС). Бортовое оборудование ряда ВС позволяет экипажу непрерывно определять сторону и величину углового отклонения от ЛЗП. В зональной навигации необходимая для наведения информация об отклонении от ЛЗП формируется бортовым навигационным вычислителем (компьютером) расчетным путем на основе информации о местоположении ВС, поступающей от навигационных датчиков. Поворотными пунктами маршрутов зональной навигации могут являться произвольные точки (точки пути), заданные геодезическими координатами на земной поверхности (широтой и долготой). Следовательно, маршруты зональной навигации не обязательно проходят через наземные навигационные средства. Примечание. В отличие от маршрутов ОВД и процедур полета в районе аэродрома, при полетах во внеаэродромном пространстве радиолокационное наведение (векторение) не используется. Радиолокационный контроль осуществляется только в целях ОВД для эшелонирования и предотвращения отклонений ВС за допустимые пределы. Бортовой вычислитель, определяющий величину отклонения ВС от ЛЗП, а также навигационные средства, с помощью которых определяется местоположение ВС, составляют оборудование зональной навигации (оборудование RNAV). В качестве датчиков для оборудования зональной навигации могут использоваться образующие угломерно-дальномерную систему радиомаяки VOR/DME, система из двух дальномерных радиомаяков DME/DME, инерциальные навигационные системы (далее - ИНС), разностно-дальномерные системы LORAN-C (РСДН-10) и спутниковые навигационные системы (GNSS). В бортовой базе аэронавигационных данных содержится информация о геодезических координатах точек пути, а также о координатах наземных радиомаяков (если они используются в данном виде оборудования RNAV). Для зональной навигации, основанной на VOR/DME (или DME/DME), бортовое оборудование RNAV включает в себя вычислитель, который по измеренным значениям пеленга от VOR и дальности от DME (или дальностей до двух радиомаяков DME) и координатам радиомаяков рассчитывает широту и долготу местоположения ВС, а затем с использованием координат точек пути определяет величину отклонения ВС от ЛЗП и другие навигационные параметры (оставшееся расстояние, время, фактический путевой угол и т.п.). Рассчитанное отклонение от ЛЗП индицируется на приборе пилота в виде отклонения вертикальной планки от центра прибора, а также может использоваться для автоматического управления полетом. Для прочих видов оборудования RNAV (LORAN-C, ИНС, GNSS) специальный вычислитель не требуется, поскольку он имеется в составе этих систем. Наиболее перспективным и эффективным оборудованием зональной навигации являются спутниковые навигационные системы (CPS NAVSTAR, ГЛОНАСС и в перспективе GALILEO). Они обеспечивают точное определение координат ВС, его скорости и точного времени над всей территорией земного шара. Бортовое оборудование этих систем имеет обновляемую аэронавигационную базу данных и реализует функции, необходимые для зональной навигации в условиях действия требуемых навигационных характеристик (RNP) в системе CNC/ATM. |
Последнее изменение этой страницы: 2019-04-11; Просмотров: 1341; Нарушение авторского права страницы