|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Установление пунктов маршрута
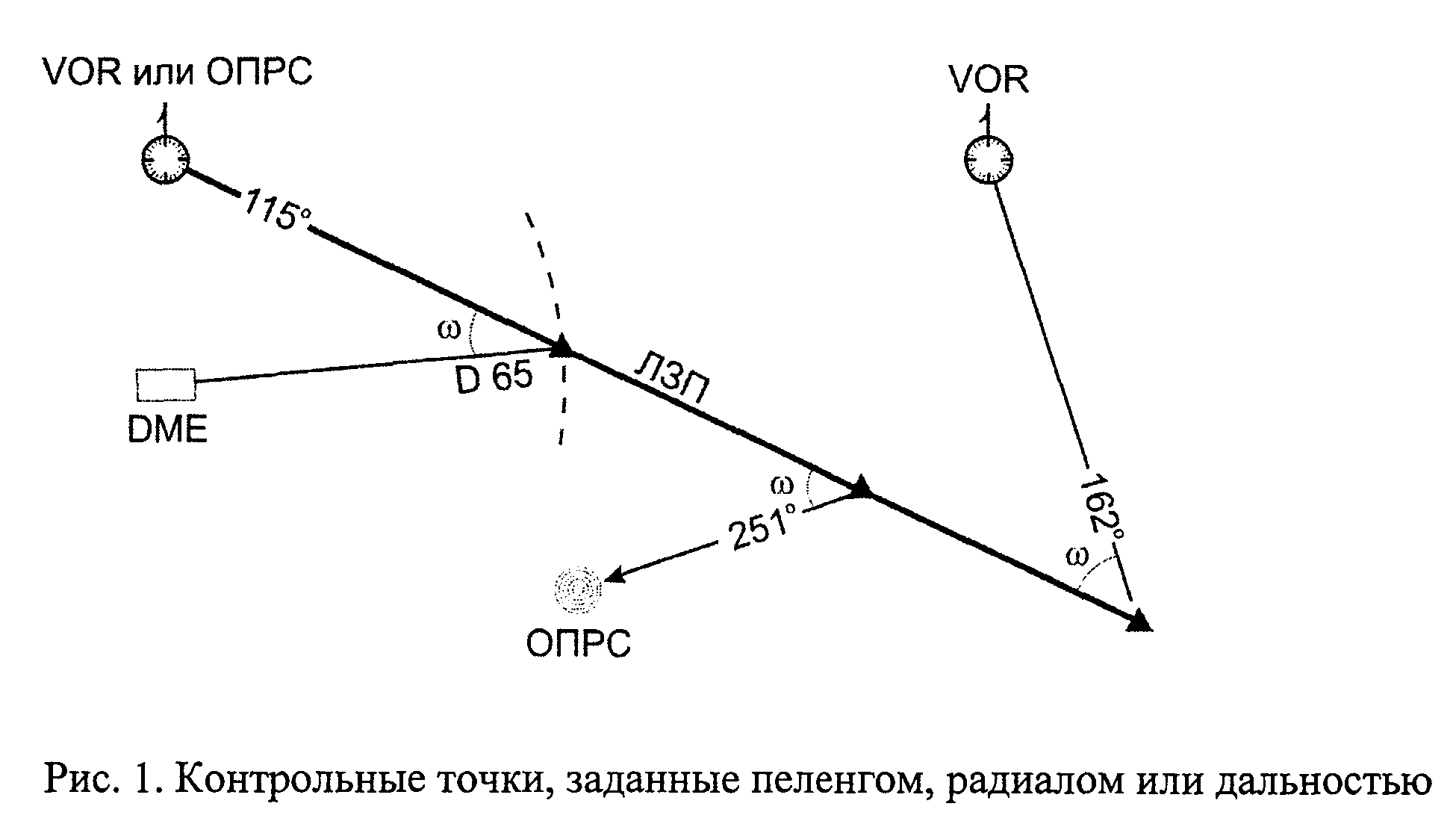
Маршрут ОВД задается путем установления пунктов маршрута, включающих в себя ИПМ, КПМ и пункты маршрута (далее - ПМ), в которых ЛЗП меняет свое направление (ППМ). Для обычных маршрутов все пункты являются контрольными точками. Контрольные точки (КТ), с помощью которых задается ЛЗП для обычных маршрутов, устанавливаются исходя из следующих условий: > обеспечивается наведение при полете "на" или "от" КТ; > экипаж имеет возможность зафиксировать пролет КТ с помощью бортовых средств. Способы задания контрольных точек приведены в п. 2.3.1. При выборе пунктов маршрута целесообразно руководствоваться следующим. 1. Минимальная протяженность маршрута не является основным фактором при его создании. Небольшое увеличение протяженности линии заданного пути может позволить оптимизировать потоки воздушного движения, избежать непрогнозируемых задержек или исключить необходимость полета в зоне ожидания. 2. Для повышения пропускной способности воздушного пространства отдается предпочтение созданию маршрутов с односторонним движением, особенно в тех районах, в которых на маршрутах осуществляется набор высоты и/или снижение. 3. При создании маршрутов учитывается рабочая нагрузка диспетчера ОВД, и при необходимости меняются конфигурация маршрута или разделение воздушного пространства на секторы. 4. Не следует допускать транзита слишком малой продолжительности в переделах одного района полетной информации (сектора). Рекомендуется придерживаться принятой в европейском воздушном пространстве концепции планирования "бесшовной" сети маршрутов, когда маршруты для сокращения их протяженности создаются без учета границ районов полетной информации. Если проложенные таким образом маршруты проходят по незначительной части воздушного пространства РПИ (район полетной информации), необходимо передавать ответственность за ОВД другому РПИ, чтобы не создавать дополнительной нагрузки, связанной с передачей управления, согласованием и координа- цией. 5. Маршруты рекомендуется строить с учетом процедур организации движения в районах аэродромов (SID/STAR) и методов организации потоков воздушного движения. 2.3.1. Способы задания контрольных точек Контрольные точки рекомендуется задавать одним из следующих способов. 1. Контрольные точки, маркированные угломерным радионавигационным средством. В качестве наземных навигационных средств для задания КТ могут использоваться VOR и ОПРС (NDB). Если ЛЗП проходит через маркированную КТ, обеспечивается выполнение обоих условий - наведение при полете "на" и "от" средства, и экипаж имеет возможность зафиксировать пролет КТ. Примечания. Маркерный радиомаяк (МРМ) сам по себе не может задавать КТ, поскольку обеспечивает фиксирование его пролета, но не обеспечивает наведение. Но он может использоваться как КТ для фиксирования пролета при условии, что наведение обеспечивается другим навигационным средством. Дальномерный радиомаяк (DME) не обеспечивает наведение по ЛЗП, проходящей через точку его установки. Он может обеспечивать наведение по ЛЗП в форме окружности с центром в точке расположения радиомаяка. Такие ЛЗП могут использоваться только в районе аэродрома на маршрутах вылета, прибытия и захода на посадку. 2. Контрольные точки, заданные пеленгом (радиалом) от бокового угломерного средства при полете по ЛЗП, наведение по которой обеспечивается другим навигационным средством. Если на ЛЗП, проходящей на/от навигационного угломерного средства (VOR или ОПРС) необходимо установить КТ, то на маршрутной карте публикуется пеленг (радиал) от другого средства (VOR или ОПРС), расположенного в стороне от ЛЗП (рис.1). В этом случае наведение будет обеспечиваться первым средством, а момент пролета фиксируется экипажем по достижению опубликованного пеленга (радиала) от второго средства. Термин "радиал" используется применительно к VOR и обозначает магнитный пеленг КТ, измеренный от меридиана радиомаяка. В этом случае на маршрутной карте публикуется радиал от радиомаяка. Если в качестве бокового навигационного средства используется ОПРС, публикуется магнитный пеленг на ОПРС, измеренный от меридиана КТ.
Минимально допустимое значение угла ω между ЛЗП и линией пеленга зависит от типа и удаления D бокового навигационного средства и может быть определено по графику, приведенному на рис. 2.
Для контрольных точек, которые не являются поворотными пунктами маршрута (ЛЗП в них не меняет направления), а используются в целях ОВД как пункты донесения, допускается отступление от данных значений. Однако следует учитывать, что при углах между ЛЗП и линией пеленга менее минимальных, приведенных на рис. 2, значительно возрастает погрешность фиксирования пролета контрольной точки.
3. Контрольные точки, заданные дальностью от наземного дальномерного средства (DME) при полете по ЛЗП, наведение по которой обеспечивается другим навигационным средством.
Аналогично предыдущему случаю, наведение осуществляется с помощью VOR или ОПРС, расположенных на ЛЗП. Фиксирование пролета осуществляется по достижении фактической дальностью значения, опубликованного на маршрутной карте. Дальномерный радиомаяк может располагаться на ЛЗП (например, VOR совмещен с DME) или находиться в стороне от ЛЗП. При боковом расположении радиомаяка угол между ЛЗП и линией, соединяющей КТ с радиомаяком, не может превышать 23°, а дальность до КТ - по возможности меньше.
Примечание.
Пример задания пунктов маршрута приведен в Приложении 2 настоящих Методических рекомендаций.
Рекомендации к конфигурации маршрута
Зоны, в которых пересекаются маршруты ОВД, являются потенциально опасными. Следует сводить к минимуму число пересечений маршрутов, особенно предназначенных для основных потоков движения. При этом рекомендуется, по возможности, избегать точек пересечения пар маршрутов, создаваемых для встречных потоков воздушного движения. Точки пересечения целесообразно располагать в пределах зон радиолокационного контроля.
Не следует допускать образования конфликтных точек вблизи границы сектора для входящего движения, которое влечет увеличение рабочей нагрузки в связи с чрезмерным объемом координационной деятельности. Зоны пересечения не должны вступать в конфликт с маршрутами набора высоты или снижения в крупных аэропортах.
Через точки пересечения (схождения) маршрутов рекомендуется прокладывать не более двух маршрутов с высокой/средней плотностью движения и не более трех маршрутов с низкой плотностью.
Для маршрутов, сходящихся в точке расположения VOR, а также для маршрутов зональной навигации угол схождения целесообразно устанавливать не менее 15°. Для маршрутов, сходящихся в ОПРС - не менее 30°. Если хотя бы на одном из сходящихся маршрутов в точке схождения (пересечения) маршрутов отсутствует наведение - не менее 45°.
Рекомендуется устанавливать длину участков маршрута между контрольными точками, в которых изменяется его направление (ППМ), не менее 30 км в нижнем воздушном пространстве и не менее 50 км в верхнем воздушном пространстве.
Максимальная протяженность участков не ограничивается, но следует учитывать, что при их протяженности более 300-400 км на части участка будет отсутствовать наведение. Это приведет к увеличению размеров защищенного воздушного пространства и зоны учета препятствий, что, в свою очередь, повлечет увеличение минимальной безопасной высоты и может создать проблемы с отделением маршрута от других элементов структуры воздушного пространства.
Рекомендации по построению защищенного воздушного пространства
С каждым маршрутом ОВД связано свое защищенное воздушное пространство (ЗВП), которое может быть использовано для отделения данного маршрута от других элементов воздушного пространства (других маршрутов, зон ограничений и т.п.).
Размеры и конфигурация ЗВП на каждом участке маршрута в общем случае являются переменными и зависят от точности навигации, достижимой на данном участке. Поскольку погрешности выдерживания ЛЗП являются случайными, ЗВП строится для определенной вероятности нахождения ВС в его пределах.
Для каждого маршрута ОВД строится ЗВП для вероятности Р = 0,95. Это означает, что в пределах этого ЗВП ВС находится на протяжении не менее 95% времени полета. Для воздушных трасс ширина такого ЗВП является шириной воздушной трассы.
В некоторых случаях, например, для разделения маршрутов ОВД, рекомендуется строить ЗВП для вероятности Р = 0,995, которое имеет большие размеры.
ЗВП строится для каждого прямолинейного участка маршрута. В отдельных случаях строится дополнительное ЗВП в районе, в котором происходит изменение направления маршрута (в районе ППМ).
ЗВП учитывает возможности бортовых навигационных средств по выдерживанию ЛЗП без учета возможного наличия радиолокационного контроля.
Для построения ЗВП используется карта масштаба не мельче 1:2000000, предпочтительно масштаба 1:1000000 или крупнее.
|
Последнее изменение этой страницы: 2019-04-11; Просмотров: 432; Нарушение авторского права страницы