|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
ТЕХНИЧЕСКИЙ КОДЕКС ТКП EN 1991-3-2009 (02250)Стр 1 из 11Следующая ⇒
ТЕХНИЧЕСКИЙ КОДЕКС ТКП EN 1991-3-2009 (02250) УСТАНОВИВШЕЙСЯ ПРАКТИКИ
Еврокод 1 ВОЗДЕЙСТВИЯ НА КОНСТРУКЦИИ Часть 3. Воздействия, вызванные кранами И механическим оборудованием
Еўракод 1 Уздзеянн i на канструкцы i Частка 3. Уздзеянн i , выкл i каныя кранам i I механ i чным абсталяваннем
( EN 1991- 3 :200 7 , IDT )
Издание официальное
Министерство архитектуры и строительства Республики Беларусь Минск 2010 УДК 624.072.04 (083.74) МКС 53.020.20; 91.010.30 КП 06 IDT Ключевые слова: несущие конструкции, воздействия кранов, воздействия механического
Предисловие
Цели, основные принципы, положения по государственному регулированию и управлению в области технического нормирования и стандартизации установлены Законом Республики Беларусь 1 ПОДГОТОВЛЕН ПО УСКОРЕННОЙ ПРОЦЕДУРЕ научно-проектно-производственным республиканским унитарным предприятием «Стройтехнорм» (РУП «Стройтехнорм») ВНЕСЕН главным управлением научно-технической политики и лицензирования Министерства архитектуры и строительства Республики Беларусь 2 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ приказом Министерства архитектуры и строительства Республики Беларусь от 10 декабря 2009 г. № 405 В Национальном комплексе технических нормативных правовых актов в области архитектуры 3 Настоящий технический кодекс установившейся практики идентичен европейскому стандарту ЕN 1991-3:2007 (Е) Eurocode 1: Actions on structures — Part 3: Actions induced by cranes and machinery Европейский стандарт разработан техническим комитетом по стандартизации CEN/TC 250 «Еврокоды конструкций». Перевод с английского языка (еn). Официальные экземпляры европейского стандарта, на основе которого подготовлен настоящий технический кодекс установившейся практики, и европейских стандартов, на которые даны ссылки, имеются в Национальном фонде ТНПА. Степень соответствия — идентичная (IDT) 4 ВВЕДЕН ВПЕРВЫЕ
© Минстройархитектуры, 2010
Настоящий технический кодекс установившейся практики не может быть воспроизведен, тиражирован и распространен в качестве официального издания без разрешения Министерства архитектуры и строительства Республики Беларусь
Издан на русском языке
Содержание Введение........................................................................................................................................ iv Европейский стандарт EN 1991-3:2007 (E) на английском языке..................................................... 1 Приложение Д.А (справочное) Перевод европейского стандарта EN 1991-3:2007 (E) 1 Общие положения.............................................................................................................. 40 1.1 Область применения.................................................................................................. 40 1.2 Нормативные ссылки.................................................................................................. 40 1.3 Различия между принципами и правилами применения.............................................. 41 1.4 Термины и определения............................................................................................. 41 1.5 Условные обозначения............................................................................................... 43 2 Воздействия, вызванные подъемниками и кранами на подкрановых балках...................... 44 2.1 Область применения.................................................................................................. 44 2.2 Классификация воздействий....................................................................................... 44 2.3 Расчетные состояния................................................................................................. 45 2.4 Представление воздействий кранов........................................................................... 46 2.5 Распределение нагрузок............................................................................................ 47 2.6 Вертикальные нагрузки кранов: характеристические значения................................... 50 2.7 Горизонтальные нагрузки кранов: характеристические значения................................ 50 2.8 Температурные эффекты............................................................................................ 56 2.9 Нагрузки на пешеходные мостки, лестницы, платформы и защитные ограждения...... 56 2.10 Испытательные нагрузки........................................................................................... 56 2.11 Случайные воздействия............................................................................................ 56 2.12 Усталостные нагрузки............................................................................................... 57 3 Воздействия, вызванные машинным оборудованием......................................................... 60 3.1 Область применения.................................................................................................. 60 3.2 Классификация воздействий....................................................................................... 60 3.3 Расчетные состояния................................................................................................. 61 3.4 Представление воздействий....................................................................................... 61 3.5 Характеристические значения..................................................................................... 62 3.6 Критерии эксплуатационной пригодности................................................................... 63 Приложение А (обязательное) Основы проектирования: дополнительные условия Приложение B (справочное) Руководящие указания для классификации кранов
Введение Настоящий технический кодекс установившейся практики разработан по ускоренной процедуре Текст европейского стандарта опубликован на языке оригинала. Перевод европейского стандарта на русский язык (с приложениями А, В) приведен в справочном приложении Д.А.
Приложение Д.А (справочное)
Еврокод 1 ВОЗДЕЙСТВИЯ НА КОНСТРУКЦИИ Уздзеянн i на канструкцы i Дата введения 2010- 01 -01
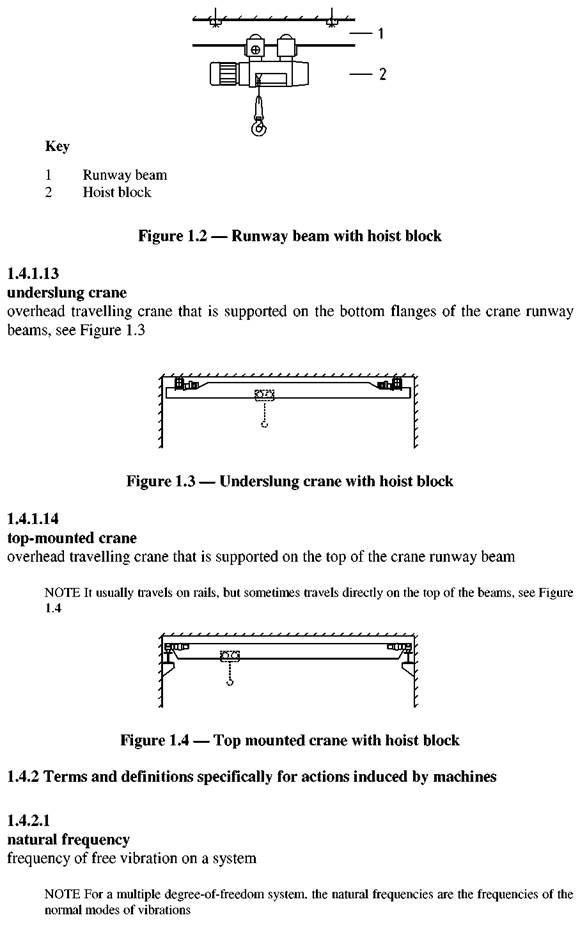
Общие положения Область применения (1) Часть 3 EN 1991 устанавливает приложенные нагрузки (модели и репрезентативные значения), ассоциируемые с кранами на подкрановых балках и стационарным машинным оборудованием, которые включают, когда это уместно, динамические эффекты, торможение, ускорение и второстепенные силы. (2) Раздел 1 формулирует общие определения и понятия. (3) Раздел 2 определяет воздействия на подкрановые пути, вызванные кранами. (4) Раздел 3 определяет воздействия, вызванные стационарным машинным оборудованием. Нормативные ссылки Настоящий европейский стандарт содержит положения других публикаций в виде датированных или недатированных ссылок. Эти нормативные ссылки располагаются в соответствующих местах текста, а перечень публикаций приводится ниже. Для датированных ссылок последующие поправки или редакции любых из этих публикаций применимы к данному европейскому стандарту, только если они включены в него посредством внесения поправки или изменения редакции. Для недатированных ссылок применимо последнее издание публикации, на которую дается ссылка (с учетом поправок). ISO 3898 Основы проектирования строительных конструкций. Понятия. Общие символы ISO 2394 Общие принципы расчета надежности строительных конструкций ISO 8930 Общие принципы расчета надежности строительных конструкций. Перечень эквивалентных терминов EN 1990 Еврокод. Основы проектирования строительных конструкций EN 13001-1 Краны. Основы проектирования. Часть 1. Общие принципы и требования EN 13001-2 Краны. Основы проектирования. Часть 2. Регулирующие эффекты нагрузки EN 1993-1-9 Проектирования стальных конструкций. Часть 1-9. Усталостная прочность EN 1993-6 Проектирование стальных конструкций. Часть 6. Балки подкрановых путей. Рисунок 1.1 — Определение грузоподъемности и собственного веса крана 1.4.1.4 тележка мостового крана: Часть мостового крана, которая включает подъемный механизм и способна перемещаться по рельсам на вершине эстакады мостового крана. 1.4.1.5 эстакада мостового крана: Часть мостового крана, которая перекрывает пролет между балками подкрановых путей и служит опорой для тележки или крюковой блочной обоймы крана. 1.4.1.6 направляющий механизм: Система, используемая для удержания крана на подкрановых путях в выровненном положении посредством горизонтальных реакций между краном и подкрановыми балками. Примечание — Направляющий механизм может состоять из реборд на колесах крана или отдельной системы направляющих роликов, работающих сбоку от подкрановых рельс или сбоку от балок подкрановых путей. 1.4.1.7 подъемный механизм: Устройство для подъема грузов. 1.4.1.8 крюковая блочная обойма крана: Подвесная тележка, которая включает подъемный механизм и способна перемещаться по нижней полке балки либо по неподвижному подкрановому пути (как показано на рисунке 1.2) или под эстакадой мостового крана (как показано на рисунках 1.3 и 1.4). 1.4.1.9 крюковая блочная обойма монорельсового крана: Крюковая блочная обойма, которую поддерживает неподвижный подкрановый путь, см. рисунок 1.2. 1.4.1.10 балка подкранового пути: Балка, вдоль которой может перемещаться мостовой кран. 1.4.1.11 мостовой кран: Механизм для подъема и перемещения грузов, который передвигается на колесах вдоль подкрановых балок. Он включает один или более подъемных механизмов, смонтированных на тележках мостового крана или на подвесных тележках. 1.4.1.12 балка подкранового пути для крюковой блочной обоймы крана: Балка подкранового пути, обеспечивающая поддержку крюковой блочной обоймы монорельсового крана, которая способна перемещаться по ее нижней полке, см. рисунок 1.2.
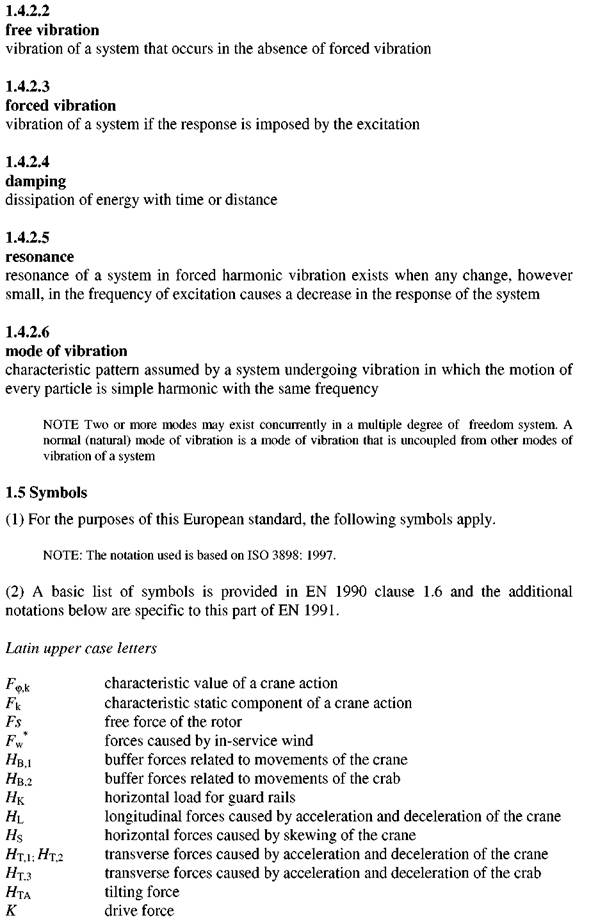
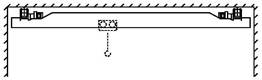
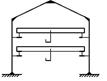
1 — балка подкранового пути; 2 — крюковая блочная обойма крана Рисунок 1.2 — Балка подкранового пути с крюковой блочной обоймой крана 1.4.1.13 подвесной кран (underslung crane): Мостовой кран, который опирается на нижние полки подкрановых балок, см. рисунок 1.3.
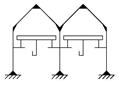
Рисунок 1.3 — Подвесной кран с крюковой блочной обоймой 1.4.1.14 палубный кран, устанавливаемый над балкой кранового пути: Мостовой кран, который опирается на верхнюю поверхность балки кранового пути. Примечание — Обычно он перемещается по рельсам, но иногда непосредственно по верхней поверхности балок, см. рисунок 1.4.
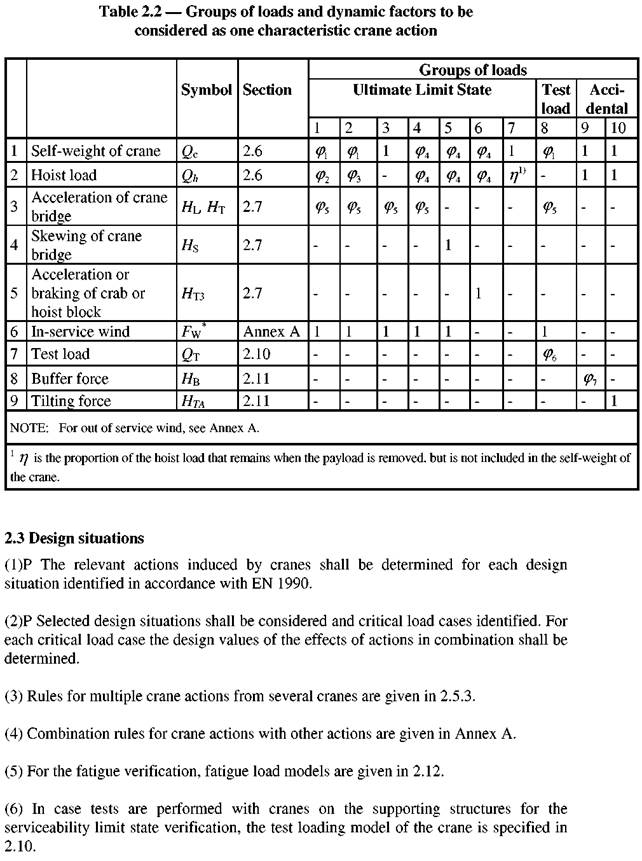
Рисунок 1.4 — Палубный кран с крюковой блочной обоймой 1.4.2 Специальные термины и определения для воздействий, вызванных машинным 1.4.2.1 собственная частота: Частота свободных колебаний в системе. Примечание — Для систем со многими степенями свободы собственными частотами являются частоты нормальной формы вибраций. 1.4.2.2 свободные колебания: Колебания системы, происходящие в отсутствие вынужденных колебаний. 1.4.2.3 вынужденные колебания: Колебания системы, принудительно вызванные возбуждением. 1.4.2.4 затухание: Рассеяние энергии по мере увеличения времени или расстояния. 1.4.2.5 резонанс: Ответное колебание системы при вынужденных гармонических колебаниях существует, когда любое изменение частоты возбуждения, каким бы незначительным оно ни было, вызывает снижение реакции системы. 1.4.2.6 форма колебаний: Характеристическая модель поведения, принимаемая системой под воздействием колебаний, в которой движение каждой частицы является просто гармоническим на одной и той же частоте. Примечание — Две и более формы могут сосуществовать одновременно в системе со многими степенями свободы. Нормальная (естественная) форма колебаний — это форма колебаний, которая не связана с другими видами колебаний системы. Условные обозначения (1) В целях настоящего европейского стандарта применяются следующие условные обозначения. Примечание — Используемые нотации основаны на ISO 3898:1997. (2) Основной перечень условных обозначений представлен в пункте 1.6 EN 1990, а нижеследующие дополнительные нотации являются специфическими для этой части EN 1991. Область применения (1) Настоящий раздел определяет воздействия (модели и репрезентативные значения), вызванные: — подвесными тележками на подкрановых путях, см. 2.5.1 и 2.5.2; — мостовыми кранами, см. 2.5.3 и 2.5.4. (2) Методы, предписанные в этом разделе совместимы с положениями EN 13001-1 и EN 13001-2, чтобы облегчить обмен информацией с поставщиками кранов. Примечание — Если во время проектирования подкрановых путей поставщик крана известен, для реализации индивидуального проекта можно использовать более точные данные. Информация об этой процедуре может содержаться в национальном приложении. Классификация воздействий Общие положения (1) Воздействия, вызванные кранами, подлежат классификации как переменные и случайные воздействия, которые представлены разными моделями, определенными в 2.2.2 и 2.2.3. Переменные воздействия (1) В нормальных эксплуатационных условиях временные воздействия крана возникают в результате изменений во времени и местоположении. Они включают гравитационные нагрузки, в том числе грузоподъемность, инерционные силы, вызванные ускорением/торможением и перекосом, а также другими динамическими эффектами. (2) Переменные воздействия крана следует подразделять на: — переменные вертикальные воздействия крана, вызванные собственным весом крана и грузоподъемностью; — переменные горизонтальные воздействия крана, вызванные ускорением, торможением или перекосом, а также другими динамическими эффектами. (3) Различные репрезентативные значения переменных воздействий крана являются характеристическими значениями, состоящими из статического и динамического компонентов. (4) Динамические компоненты, вызванные колебаниями под воздействием инерционных или демпфирующих сил, как правило, учитываются коэффициентами динамичности j, которые применяются к значениям статического воздействия. где Fj, k — характеристическое значение воздействия крана; ji — коэффициент динамичности, см. таблицу 2.1; Fk — характеристический статический компонент воздействия крана. (5) Различные коэффициенты динамичности и их применение перечислены в таблице 2.1. (6) Одновременное действие компонентов крановой нагрузки можно учесть, рассматривая группы нагрузок, определенные в таблице 2.2. Каждую из этих групповых нагрузок следует рассматривать как определяющую одно характеристическое воздействие крана на комбинацию некрановых нагрузок. Примечание — Классификация по группам обеспечивает одновременное рассмотрение только одного горизонтального воздействия крана. Случайные воздействия (1) Краны могут генерировать случайные воздействия в результате столкновения с буферами (буферными силами) или столкновения подъемных приспособлений с препятствиями (опрокидывающими силами). Эти воздействия следует учитывать с целью проектирования конструкции, где не обеспечена надлежащая защита. (2) Случайные воздействия, определенные в 2.11, относятся к общим ситуациям. Они представлены различными моделями нагрузок, определяющих значения проекта (т. е. подлежащих применению с gA = 1,0) в форме эквивалентных статических нагрузок. (3) Одновременное действие случайных компонентов крановой нагрузки можно учесть, рассматривая группы нагрузок, определенные в таблице 2.2. Каждая из этих групповых нагрузок определяет одно воздействие крана на комбинацию некрановых нагрузок. Таблица 2.1 — Коэффициенты динамичности ji
Расчетные состояния (1)P Соответствующие воздействия, вызванные кранами, должны определяться для каждой расчетной ситуации, определяемой в соответствии с EN 1990. (2)P Должны рассматриваться избранные расчетные ситуации и определяться случаи критических нагрузок. Для каждого случая критической нагрузки должны определяться расчетные значения эффектов комбинированных воздействий. (3) Нормы множественных воздействий кранов от нескольких кранов приведены в 2.5.3. (4) Правила комбинирования крановых воздействий с другими воздействиями приведены в приложении A. (5) Для верификации усталостности в 2.12 даны модели усталостных нагрузок. (6) На случай проведения испытаний кранов на опорных конструкциях на предмет проверки предельного состояния эксплуатационной надежности модель испытательной нагрузки на кран указана в 2.10. Таблица 2.2 — Групповые нагрузки и коэффициенты динамичности, которые рассматриваются
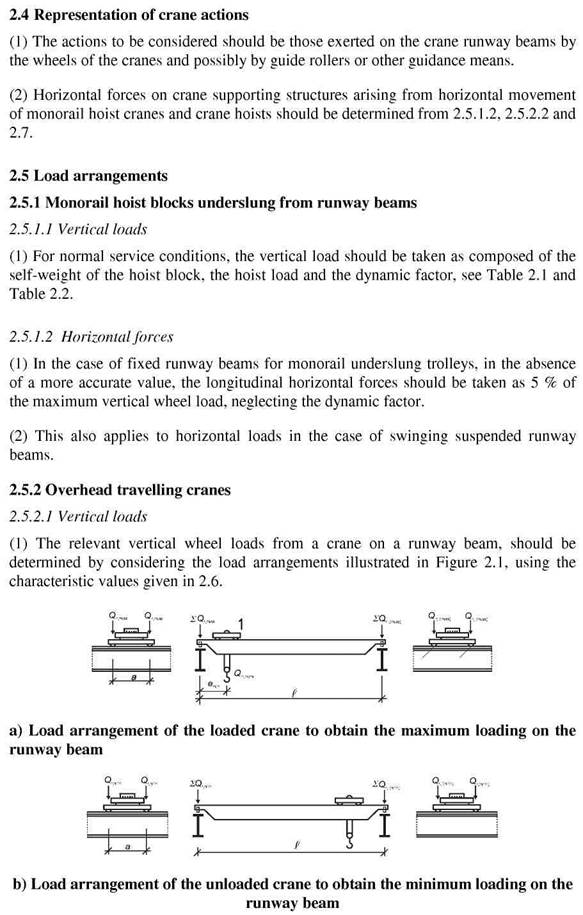
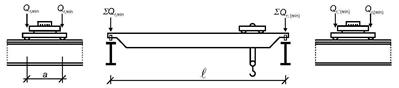
Распределение нагрузок Вертикальные нагрузки (1) В нормальных условиях эксплуатации вертикальную нагрузку следует принять как составную из собственного веса крюковой блочной обоймы, грузоподъемности и коэффициента динамичности, см. таблицу 2.1 и таблицу 2.2. Горизонтальные силы (1) В случае, когда монорельсовые подвесные тележки перемещаются по неподвижным балкам крановых путей, при отсутствии более точного значения, продольные горизонтальные силы следует принять за 5 % максимальной вертикальной нагрузки на колесо, пренебрегая коэффициентом динамичности. (2) Это применимо также к горизонтальным нагрузкам в случае с поворотными подвесными балками подкрановых путей. Мостовые краны Вертикальные нагрузки (1) Соответствующие вертикальные нагрузки колеса крана на балку подкранового пути следует определять с учетом распределения нагрузки показанного на рисунке 2.1, используя характеристические значения, приведенные в разделе 2.6. а) Распределение нагрузки крана под нагрузкой с целью достижения максимальной нагрузки на балку подкранового пути
b) Распределение нагрузки крана без нагрузки с целью достижения минимальной нагрузки на балку подкранового пути
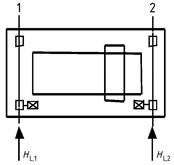
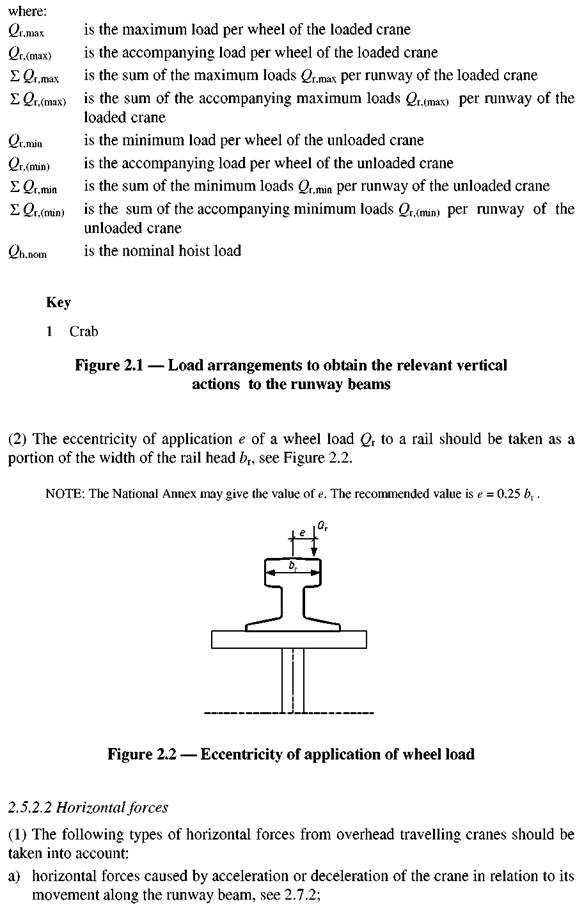
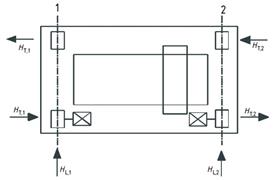
Q r,max — максимальная нагрузка на колесо нагруженного крана; Q r,(max) — сопутствующая нагрузка на колесо нагруженного крана; åQ r,max — сумма максимальных нагрузок Qr,max на подкрановый путь нагруженного крана; åQ r,(max) — сумма сопутствующих максимальных нагрузок Qr,(max) на подкрановый путь нагруженного крана; Q r,min — минимальная нагрузка на колесо крана без нагрузки; Q r,(min) — сопутствующая нагрузка на колесо крана без нагрузки; åQ r,min — сумма минимальных нагрузок Qr,min на подкрановый путь крана без нагрузки; åQ r,(min) — сумма сопутствующих минимальных нагрузок Qr,(min) на подкрановый путь крана без нагрузки; Q h,nom — номинальная грузоподъемность. 1 — Тележка мостового крана Рисунок 2.1 — Распределение нагрузки с целью достижения соответствующих Рисунок 2.2 — Эксцентриситет приложения нагрузки на колесо Горизонтальные силы (1) Необходимо принять во внимание следующие виды горизонтальных сил, вызываемых мостовыми кранами: a) горизонтальные силы, вызванные ускорением или торможением крана относительно его движения вдоль балки подкранового пути, см. 2.7.2; b) горизонтальные силы, вызванные ускорением или торможением тележки мостового крана или подвесной тележки относительно их движения вдоль эстакады мостового крана, см. 2.7.5; c) горизонтальные силы, вызванные перекосом крана относительно направления его движения вдоль балки подкранового пути, см. 2.7.4; d) буферные силы, связанные с движением крана, см. 2.11.1; e) буферные силы, связанные с движением тележки мостового крана или подвесной тележки, см. 2.11.2. (2) Если не указано иное, в одну и ту же группу одновременно действующих компонентов крановой нагрузки может быть включен только один из пяти видoв горизонтальных сил, указанных в п.п. с (а) по (e), которые перечислены в п. (1), см. таблицу 2.2. (3) Горизонтальные силы, действующие в зоне контактной поверхности колеса подвесных кранов, следует принять, по крайней мере, за 10 % максимальной вертикальной нагрузки на колесо, пренебрегая динамическим компонентом, если отсутствует обоснование более точного значения. (4) Если не указано иное, воздействующие на колесо продольные горизонтальные силы HL,i, и поперечные горизонтальные силы HT,i, вызванные ускорением и торможением массы крана или тележки и т. п., должны распределяться, как показано на рисунке 2.3. Характеристические значения этих сил даны в 2.7.2.
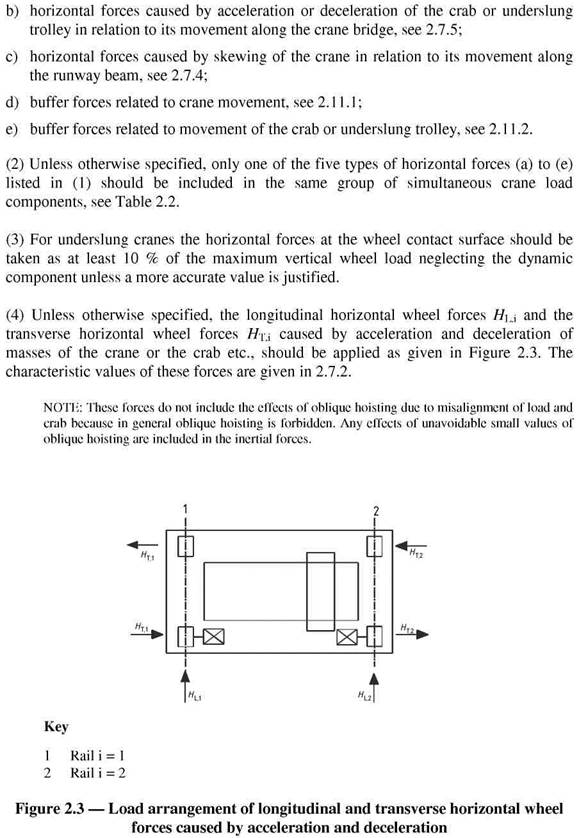
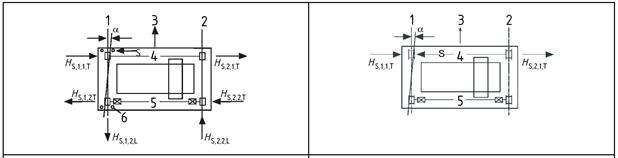
1 — рельс i = 1; 2 — рельс i = 2 Рисунок 2.3 — Распределение нагрузки, вызванной воздействующими на колесо продольными Примечание — Эти силы не включают последствия перекоса при подъеме из-за неправильного расположения груза и тележки мостового крана, так как вообще подъем грузов под наклоном запрещен. Любые последствия неизбежных и незначительных значений наклона при подъеме груза включаются в расчет инерционных сил. (5) Воздействующие на колеса продольные и поперечные горизонтальные силы H S , i , j , k, и направляющая сила S, вызванные перекосом, могут воздействовать на направляющий механизм кранов или крановых тележек во время их движения или рабочего перемещения в установившемся состоянии, см. рисунок 2.4. Эти нагрузки вызваны направляющими реакциями, которые принуждают колесо отклониться от движения в режиме естественного свободного качения или направления рабочего перемещения. Характеристические значения приведены в 2.7.4.
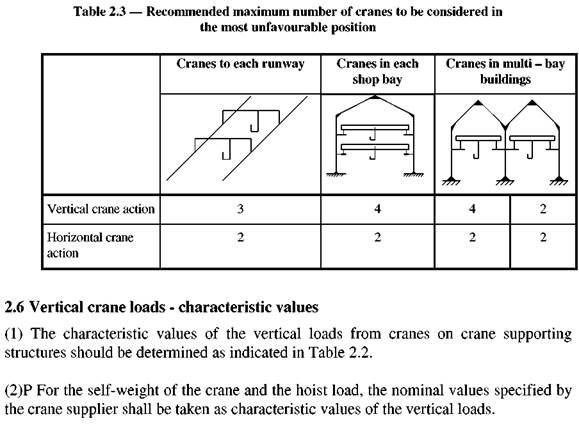
1 — рельс i = 1; 2 — рельс i = 2; 3 — направление движения; 4 — колесная пара j = 1; 5 — колесная пара j = 2; 6 — направляющий механизм Примечание 1 — Направление горизонтальных сил зависит от типа направляющего механизма, направления движения и типа привода колеса. Примечание 2 — Силы HS,i,j,k определены в 2.7.4(1). Рисунок 2.4 — Распределение нагрузки, вызванной воздействующими на колесо Таблица 2.3 — Рекомендуемое максимальное количество кранов, учитываемых в наиболее неблагоприятных условиях
Общие положения (1)P Номинальные значения эффектов ускорения и перекоса, указанные поставщиком крана, должны приниматься в качестве характеристических значений горизонтальных нагрузок. (2) Характеристические значения горизонтальных нагрузок могут быть заданы поставщиком крана или определены в соответствии с 2.7.2 – 2.7.5. 2.7.2 Продольные силы H L , i и поперечные силы H T , i , вызванные ускорением и торможением крана (1) Продольные силы H L , i, вызванные ускорением и торможением конструкции крана генерируются движущей силой на поверхности соприкосновения рельса и ведомого колеса, см. рисунок 2.5. (2) Продольные силы HL,i, приложенные к балке подкранового пути можно рассчитать следующим образом:
где n r — количество балок подкранового пути; K — движущая сила согласно 2.7.3; j5 — коэффициент динамичности, см. таблицу 2.6; i — целое число, идентифицирующее балку подкранового пути (i = 1, 2).
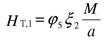
1 — рельс i = 1; 2 — рельс i = 2 Рисунок 2.5 — Продольные горизонтальные силы H L , i (3) Момент M, результирующий из движущей силы, которая должна быть приложена к центру массы, уравнивается поперечными горизонтальными силами H T,1 и H T,2, см. рисунок 2.6. Горизонтальные силы можно рассчитать следующим образом:
a — интервал между направляющими роликами или колесами с ребордами;
l — пролет эстакады моста; φ5 — коэффициент динамичности, см. таблицу 2.6; K — движущая сила, см. 2.7.3 и рисунок 2.7.
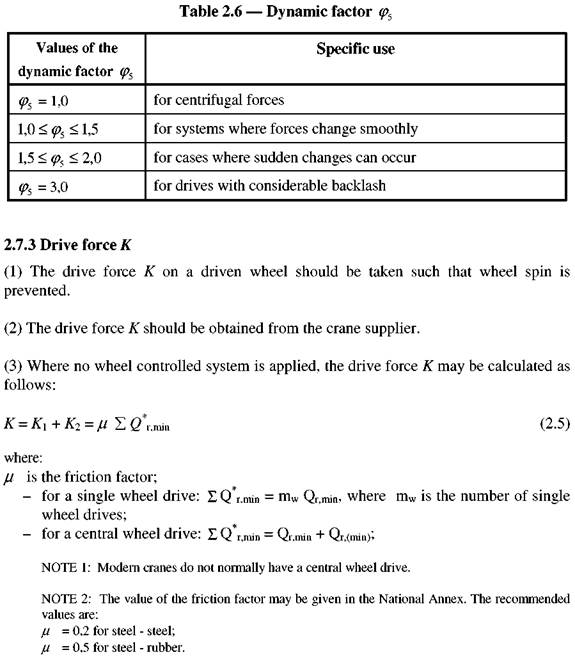
1 — рельс i = 1; 2 — рельс i = 2 Рисунок 2.6 — Определение поперечных сил H T , i (4) Для изогнутых балок подкранового пути результирующую центробежную силу следует помножить на коэффициент динамичности j5. (5) Если коэффициент динамичности j5 не включен в детализированную документацию поставщика крана, можно использовать значения, приведенные в таблице 2.6. Таблица 2.6 — Коэффициент динамичности j 5
2.7.3 Движущая сила K (1) Движущая сила K на ведомом колесе должна быть такой, чтобы колесо не проскальзывало. (2) Значение движущей силы K должен представить поставщик крана. (3) Если не применяется система управления колесами, движущая сила K может быть рассчитана следующим образом:
где m — коэффициент трения; — для привода на одно колесо:
где mw — количество приводов на одно колесо; — для привода на среднее колесо:
Примечание 1 — В современных кранах обычно отсутствует привод на среднее колесо. Примечание 2 — Значение коэффициента трения может быть задано в национальном приложении. Рекомендуются следующие значения: m = 0,2 для сопряженных материалов стать ─ сталь; m = 0,5 для сопряженных материалов стать ─ резина.
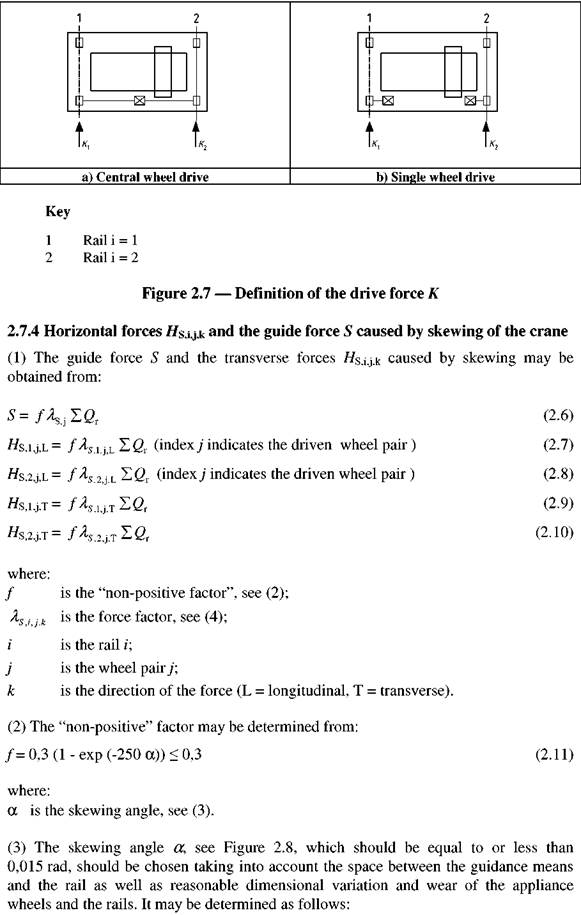
1 — рельс i = 1; 2 — рельс i = 2 Рисунок 2.7 — Определение движущей силы K 2.7.4 Горизонтальные силы H S , i , j , k и направляющая сила S , вызванные перекосом крана (1) Направляющая сила S и поперечные силы H S , i , j , k , вызванные перекосом, можно рассчитать из:
где f — “неположительный коэффициент”, см. (2); lS,i,j,k — коэффициент электромеханической связи, см. (4); i — рельс i; j — колесная пара j; k — направление действия силы (L = продольное, T = поперечное). (2) «Неположительный» коэффициент можно определить из:
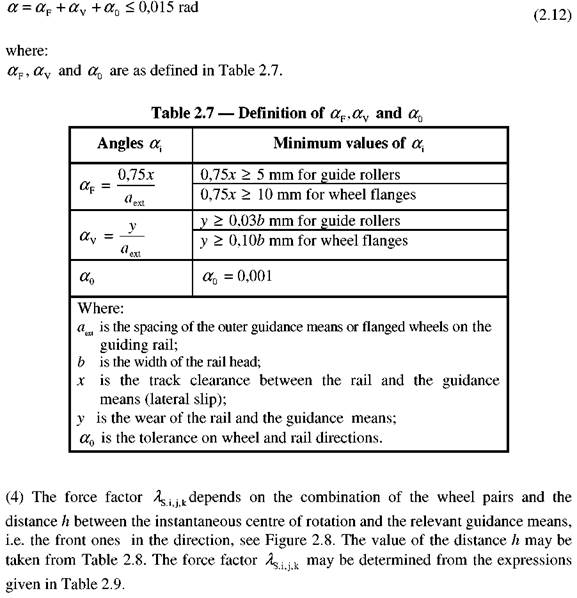
где a — угол перекоса, см. (3). (3) Угол перекоса a, см. рисунок 2.8, который должен быть равен или меньше 0,015 рад, следует выбирать с учетом промежутка между направляющим механизмом и рельсом, а также рационального разброса размеров и износа колес оборудования и рельсов. Его можно определить следующим образом: a = aF+ aV + a0 £ 0,015 rad (2.12) где aF, aV и a0 имеют значения, определенные в таблице 2.7. Таблица 2.7 — Определение a F , a V и a 0
Окончание таблицы 2.7
(4) Коэффициент электромеханической связи lS , i , j , k зависит от комбинации колесных пар и расстояния h между мгновенным центром вращения и соответствующим направляющим механизмом, а именно первыми по направлению движения, см. рисунок 2.8. Значение расстояния h может быть заимствовано из таблицы 2.8. Коэффициент электромеханической связи lS , i , j , k можно определить из выражений, приведенных в таблице 2.9.
1 — рельс i = 1; 2 — рельс i = 2; 3 — направление движения; 4 — направление рельса; 5 — направляющий механизм; 6 — колесная пара j; 7 — мгновенный центр вращения Рисунок 2.8 — Определение угла a и расстояния h Таблица 2.8 — Определение расстояния h
Таблица 2.9 — Определение значений l S , i , j , k
2.7.5 Горизонтальная сила H T , 3 , вызванная ускорением или торможением тележки мостового крана (1) Допустимо предположение, что горизонтальная сила HT,3, вызванная ускорением или торможением тележки мостового крана или подвесной тележки, покрыта горизонтальной силой HB,2, определенной в 2.11.2. Температурные эффекты (1)P Последствия воздействий на подкрановые пути в результате температурных колебаний должны приниматься во внимание по мере необходимости. В общем, нет необходимости учитывать неравномерное распределение температуры. (2) О разнице температуры подкрановых путей под открытым небом см. EN 1991-1-5. Вертикальные нагрузки (1) Если не указано иное, пешеходные мостки, лестницы и платформы могут нагружаться вертикальной нагрузкой Q, распределенной на поверхности площадью 0,3´0,3 м. (2) Там, где можно нанести покрытие материалами методами осаждения, следует прилагать вертикальную нагрузку Q k = 3 кН. (3) Если пешеходные мостки, лестницы и платформы обеспечивают только доступ, характеристическое значение в п. (2) можно уменьшить до 1,5 кН. (4) Вертикальной нагрузкой Q k можно пренебречь, если рассматриваемый конструктивный элемент подвержен воздействиям крана. Горизонтальные нагрузки (1) Если не указано иное, защитное ограждение следует нагружать сосредоточенной горизонтальной нагрузкой H k = 0,3 кН. (2) Горизонтальной нагрузкой Hk можно пренебречь, если все конструктивные элементы подвержены воздействиям крана. Испытательные нагрузки (1) Когда испытания проводятся после монтажа кранов на опорных конструкциях, необходимо проверить соответствие опорных конструкций условиям приложения испытательных нагрузок. (2) Когда это уместно, для таких испытательных нагрузок должны проектироваться опорные крановые конструкции. (3)P Испытательная нагрузка на грузоподъемность должна быть увеличена на фактор динамичности гармонической силы j6. (4) При рассмотрении испытательных нагрузок необходимо различать следующие случаи: — Динамическая испытательная нагрузка: С помощью приводов испытательная нагрузка перемещается в направлении, где будет применяться кран. Испытательная нагрузка должна составлять, по крайней мере, 110 % номинальной грузоподъемности.
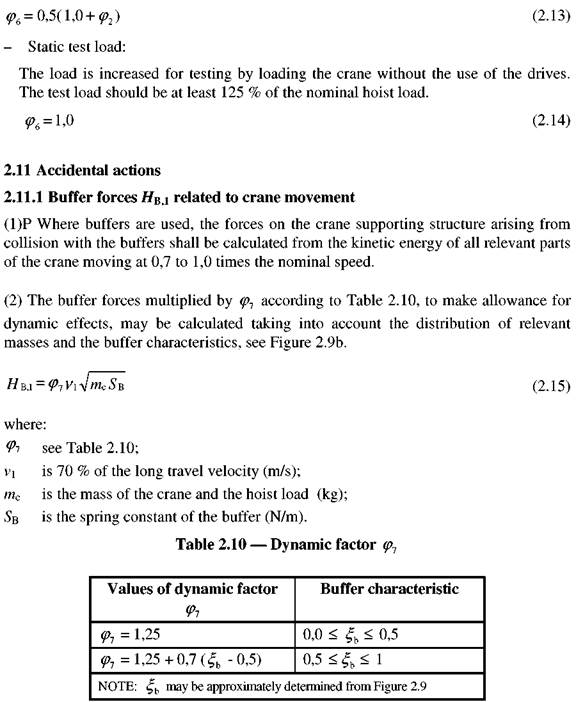
— Статическая испытательная нагрузка: В процессе испытаний нагрузка повышается путем нагружения крана без применения приводов. Испытательная нагрузка должна составлять, по крайней мере, 125 % номинальной грузоподъемности.
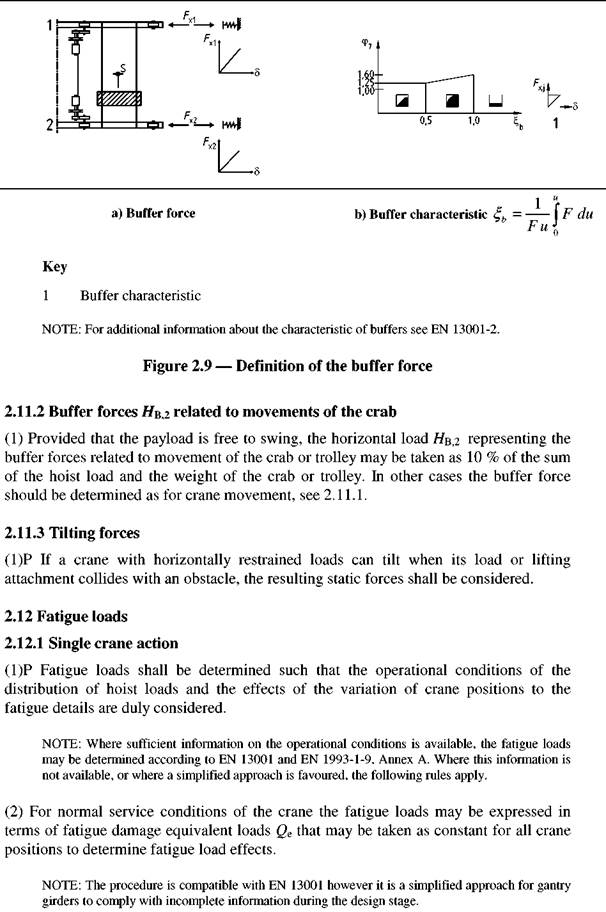
Случайные воздействия 2.11.1 Буферные силы H B ,1 , связанные с движением крана (1)P Когда используются буферы, силы, воздействующие на опорную конструкцию крана, которые возникают при столкновении с буферами, должны рассчитываться исходя из кинетической энергии всех задействованных частей крана, который перемещается со скоростью от 0,7 до 1,0 номинальной скорости. (2) Буферные силы, помноженные на j7 в соответствии с таблицей 2.10, чтобы учесть динамические эффекты, можно рассчитать, приняв во внимание распределение соответствующих масс и буферных характеристик, см. рисунок 2.9b.
где j7 — см. таблицу 2.10; n1 = 70 % скорости на длинном ходу (м/сек); m c — масса крана и грузоподъемность (в кг); S B — динамическая жесткость буфера (Н/м). Таблица 2.10 — Коэффициент динамичности j 7
1 — характеристика буфера Примечание — Дополнительную информацию о характеристиках буферов см. в EN 13001-2. Рисунок 2.9 — Определение буферной силы 2.11.2 Буферные силы H В,2 , связанные с движениями тележки мостового крана (1) При условии, что полезный груз раскачивается в свободном состоянии, горизонтальная нагрузка H B ,2, представляющая буферные силы, связанные с движением тележки мостового крана или подвесной тележки, можно принять за 10 % суммы поднятого веса и веса тележки мостового крана или подвесной тележки. В других случаях буферная сила определяется так же, как при движении крана, см. 2.11.1. Опрокидывающие силы (1)P Если горизонтальные нагрузки на кран сдерживаются, но кран может опрокинуться при столкновении груза или подъемного приспособления с препятствием, необходимо учесть результирующие статические силы. Усталостные нагрузки Таблица 2.11 — Классификация усталостных воздействий кранов в соответствии с EN 13001-1
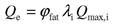
(4) Усталостную нагрузку можно определить как:
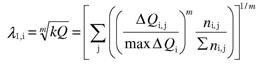
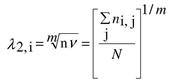
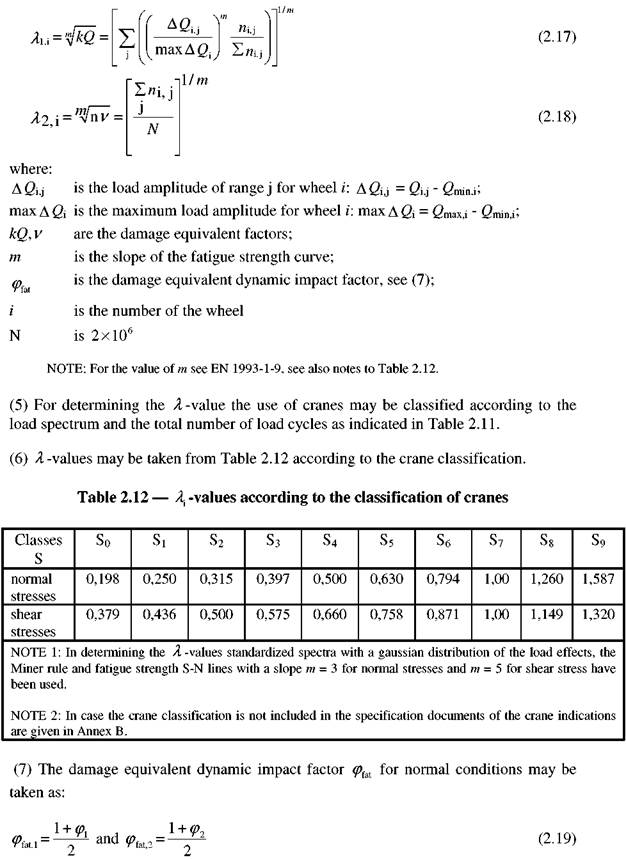
где Qmax,,i — максимальное характеристическое значение вертикальной нагрузки на колесо i; l i = l1,i l2,i — коэффициент эквивалентного разрушения для введения поправки на соответствующий стандартизированный спектр усталостного нагружения и абсолютное количество циклов нагружения относительно N = 2,0×106 циклов.
где DQ i , j — амплитуда нагрузки в диапазоне j на колесо i:
maxDQ i — максимальная амплитуда нагрузки на колесо i:
k Q , n — коэффициенты эквивалентного разрушения; m — наклон кривой усталостной прочности; jfat — коэффициенты эквивалентного разрушения при динамической нагрузке, см. (7); i — количество колес N = 2×106. Примечание — Значение m см. в EN 1993-1-9; также см. примечания к таблице 2.12. (5) Чтобы рассчитать значение l, использование кранов можно классифицировать в соответствии со спектром нагружения и общим количеством циклов нагружения, как показано в таблице 2.11. (6) Значения l можно заимствовать из таблицы 2.12 с учетом классификации крана. Таблица 2.12 — Значения l i в соответствии с классификацией кранов
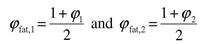
(7) Коэффициент эквивалентного разрушения при динамическом воздействии jfat в нормальных условиях можно принять за:
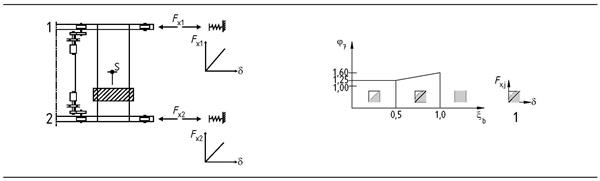
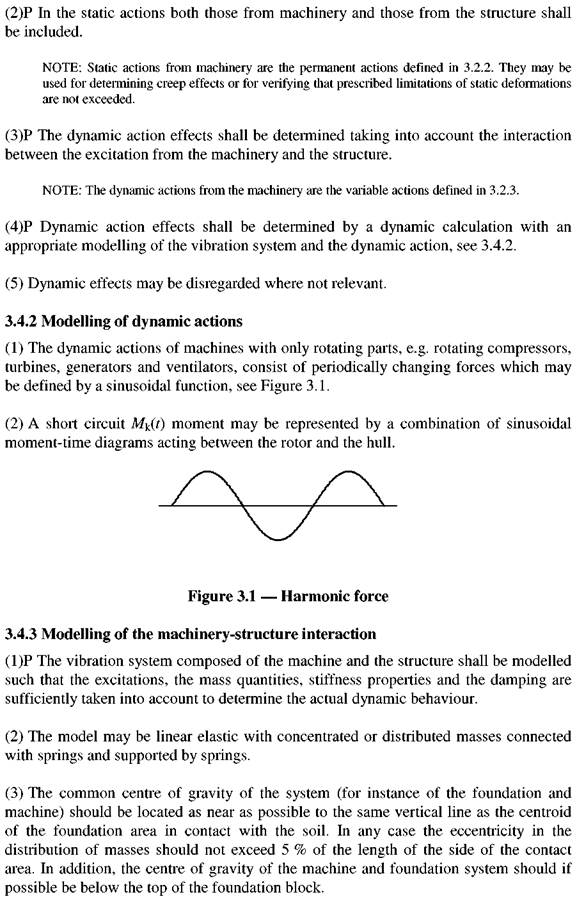
Область применения (1) Этот раздел применяется к опорным конструкциям поворотного оборудования, которое вызывает динамические эффекты в одной и более плоскостях. (2) В этом разделе представлены методы расчета динамического поведения и эффектов воздействия с целью проверки безопасности конструкций. Примечание — Хотя точный предел установить невозможно, в общем можно предположить, что в отношении малогабаритного машинного оборудования, где вращаются лишь отдельные части, вес которого Классификация воздействий Общие положения (1)P Воздействия машинного оборудования классифицируются как постоянные, временныеи случайные воздействия, которые представлены различными моделями согласно описанию в 3.2.2 – 3.2.4. Постоянные воздействия (1) Постоянные воздействия в процессе эксплуатации включают собственный вес всех неподвижных и подвижных деталей, а также статические эксплуатационные воздействия, возникающие в результате таких факторов как: — собственный вес роторов и корпуса (по вертикали); — собственный вес холодильников, если это уместно, с учетом заполнения водой (по вертикали); — воздействие разреженности для турбин, испарители которых соединены с корпусом компенсаторами (по вертикали и по горизонтали); — вращающий момент механизма, сообщаемый фундаменту корпусом (парными вертикальными силами); — силы трения в подшипниках, вызванные тепловым расширением корпуса (по горизонтали); — воздействий собственного веса, сил и моментов в трубах в связи с тепловым расширением, воздействий газа; течения потока и давления газа (по вертикали и по горизонтали); — температурных эффектов в механизмах и трубах, например, при разнице температуры механизма с трубами и фундаментом. (2) Постоянные воздействия на переходных стадиях (монтаж, техническое обслуживание или ремонт) генерируются собственным весом, включая только подъемное оборудование, подмости и другие вспомогательные устройства. Временные воздействия (1) Временные воздействия машинного оборудования в процессе нормальной эксплуатации являются динамическими воздействиями, вызванными ускорением массы, такими как: — периодически действующие частотно-зависимые несущие силы, связанные с эксцентриситетом масс, вращающихся во всех направлениях, преимущественно перпендикулярно оси роторов; — силы неуравновешенной массы или моменты инерции; — периодические эксплуатационные воздействия, зависимые от типа машинного оборудования, которые передаются фундаментам корпусом или подшипниками; — силы или моменты, связанные с включением или выключением и другими переходными Случайные воздействия (1) Случайные воздействия могут возникнуть в результате: — временного увеличения эксцентриситета масс (например, поломки тормозов, случайной деформации или разрыва оси движущихся деталей); — короткого замыкания или рассогласования генераторов и машинного оборудования; — эффектов динамического удара в результате закрытия трубопроводов. Расчетные состояния (1)P Соответствующие воздействия, вызванные машинным оборудованием, должны рассчитываться для каждой расчетной ситуации, которая идентифицируется в соответствии с EN 1990. (2)P Расчетные ситуации выбираются, в частности, с целью, чтобы проверить, что: — условия эксплуатации машинного оборудования соответствуют эксплуатационным требованиям и не влекут повреждения опорных конструкций и фундаментов оборудования в результате временных воздействий, которые могут воспрепятствовать последующему использованию данной конструкции в процессе дальнейшей эксплуатации; — влияние на окружение, например, помехи чувствительному оборудованию, находится в допустимых пределах; — в конструкции не может возникнуть крайнее предельное состояние; — в конструкции не может возникнуть предельное состояние усталости. Примечание — Если не указано иное, требования к эксплуатационной пригодности должны рассчитываться для каждого отдельного проекта. Представление воздействий Природа нагрузок (1)P При расчете эффектов воздействия необходимо проводить разницу между статическими и динамическими эффектами воздействия. (2)P При статических воздействиях в расчет должны быть включены эффекты, вызванные как машинным оборудованием, так и конструкцией. Примечание — Статическими воздействиями машинного оборудования являются постоянные воздействия, определенные в 3.2.2. Они могут использоваться для определения ползучих эффектов или для того, чтобы убедиться в том, чтобы не были превышены предписанные ограничения статических деформаций. (3)P Эффекты динамического воздействия должны рассчитываться с учетом взаимодействия между возбуждением машинного оборудования и конструкции. Примечание — Динамическими воздействиями машинного оборудования являются временные воздействия, определенные в 3.2.3. (4)P Эффекты динамического воздействия должны определяться посредством динамического расчета с соответствующим моделированием системы колебаний и динамического воздействия, см. 3.4.2. (5) Динамическими эффектами можно пренебречь, если они несущественны. Рисунок 3.1 — Гармоническая сила Характеристические значения (1) От изготовителя машинного оборудования должен быть получен полный обзор статических и динамических сил для различных расчетных состояний вместе со всеми другими данными об оборудовании, такими как контурные чертежи, вес неподвижных и подвижных органов, скорости, балансировка и т. д. (2) От изготовителя машинного оборудования должны быть получены следующие данные: — схема нагружения машинного оборудования с указанием места приложения, величины и направления всех нагрузок, включая динамические нагрузки; — скорость машинного оборудования; — критические значения скоростей машинного оборудования; — габаритные размеры фундамента; — момент инерции компонентов машинного оборудования; — детализация вставок и заделки арматуры; — расположение трубопроводов, каналов и т. п., а также их опорные элементы; — температура в различных зонах во время эксплуатации; — допустимые смещения точек приложения нагрузки на машинное оборудование в процессе нормальной эксплуатации. (3) В простых случаях динамические силы (свободные силы) воздействующие на вращающиеся детали машинного оборудования можно рассчитать следующим образом:
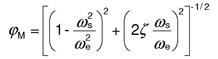
где F s — свободная сила ротора; m R — масса ротора; wr — круговая (угловая) частота ротора (рад/сек); e M — эксцентриситет массы ротора; wr e — точность балансировки ротора, выраженная как амплитуда скорости. (4) Для точности балансировки необходимо рассмотреть следующие состояния: — устойчивое состояние: машина хорошо сбалансирована. Однако со временем равновесие сокращается до уровня едва приемлемого для нормальной эксплуатации. Система предупреждения, установленная на машине, гарантирует, оператор будет предупрежден в случае превышения определенного предела. До этого состояния уравновешенности не может произойти никаких колебаний, наносящих ущерб конструкции и окружению, а требования к уровню вибраций должны выполняться. — временное состояние: балансировка полностью нарушена случайным событием: система сопровождения гарантирует выключение машины. Конструкция должна быть достаточно прочной, чтобы противостоять динамическим силам. (5) В простых случаях эффект взаимодействия в результате возбуждения машины с массой вращения и динамическим поведением конструкции можно выразить посредством эквивалентной статической силы: Feq = FsjM (3.2) где F s — свободная сила ротора; jМ — динамический коэффициент, который зависит от отношения собственной частоты ne (или we ) конструкции к частоте возбуждающей силы ns (или w5) и коэффициента затухания z. (6) Для гармонически изменяющихся сил (свободных сил поворотного оборудования) коэффициент усиления можно исчислить следующим образом: a) при незначительном затухании или состоянии далеком от резонанса
b) в случае возникновения резонанса we = ws при коэффициента затухания z
(7) Если диаграмма изменений во времени момента короткого замыкания M k(t) не указана изготовителем, можно использовать следующее выражение:
где M o — номинальный момент, результирующий из эффективной мощности; WN — угловая частота электрической цепи, рад/сек; t — время, сек. (8) Для собственных частот в диапазоне от 0,95WN до 1,05WN расчетные частоты электрической цепи должны быть идентичными этим собственным частотам. (9) В качестве упрощения, эквивалентный статический момент может быть исчислен следующим образом: Mk,eq = 1,7Mk ,max (3.6) где M k,max — пиковое значение момента цепи M k ( t ). (10) Если изготовителем неуказанно значение M k,max , можно воспользоваться следующим значением: Mk,max = 12Mo (3.7) Рисунок 3.2 — Система подпружинивания массы Приложение A (обязательное)
A .1 Общие положения (1) Настоящее приложение содержит правила сочетания частичных факторов воздействия (2) Если необходимо рассмотреть другие воздействия (например, оседание грунта, вызванное горными разработками), эти сочетания следует дополнить и учесть при расчетах. Также такие сочетания следует дополнять и приспосабливать к выполнению работ. (3) Во время комбинирования группы крановых нагрузок с другими воздействиями эта группа крановых нагрузок должна рассматриваться как одно воздействие. (4) При рассмотрении сочетания воздействий вследствие крановых нагрузок и других воздействий необходимо различать следующие случаи: — подкрановые пути вне зданий; — подкрановые пути внутри зданий, где климатическим воздействиям противостоят здания и конструктивные элементы зданий, также могут быть подвержены нагружению, прямо или косвенно, крановыми нагрузками. (5) Применительно к подкрановым путям вне зданий характерное воздействие ветра на конструкцию крана и на подъемное оборудование можно оценить в соответствии с EN 1991-1-4 как характеристическую силу Fwk. (6) При рассмотрении сочетания воздействий поднимаемых грузов с воздействием ветра, необходимо также учесть максимальную силу ветра, совместимую с эксплуатацией крана. Эта сила F * w ассоциируется со скоростью ветра равной 20 м/сек. Контрольная зона подъема груза Aref, x должна определяться для каждого отдельного случая. (7) Применительно к подкрановым путям внутри зданий воздействиями ветра и снеговыми нагрузками на конструкцию крана можно пренебречь; однако, что касается конструктивных частей здания, испытывающих ветровые, снеговые и крановые нагрузки, необходимо рассмотреть соответствующие сочетания нагрузок. Таблица A .1 — Рекомендуемые значения g -коэффициентов
(2) Для верификации относительно потери статического равновесия (EQU) и восстановления ориентации, благоприятная и неблагоприятная части воздействий крана должны рассматриваться как отдельные воздействия. Если не указано иное, (см., в частности, соответствующие Еврокоды по проектированию) неблагоприятная и благоприятная части постоянных воздействий должны ассоциироваться с обозначениями gG sup и gG inf , соответственно. Примечание — Значения g-коэффициентов могут быть заданы в национальном приложении. Рекомендуются следующие значения g: gG sup = 1,05; gG inf = 0,95. Другие g-коэффициенты воздействий (особенно переменных воздействий) имеют значения как в п. (1). Таблица A .2 — y -факторы крановых нагрузок
Примечание — y-факторы могут быть заданы в национальном приложении. Рекомендуются следующие значения y-факторов: y0 = 1,0; y1 = 0,9; y2 = отношение между постоянным воздействием крана и совокупным воздействием крана. A .4 Усталость (1) Верификация правил расчета усталости зависит от подлежащей применению модели усталостной нагрузки. Правила указаны в Еврокодах по проектированию. Приложение B (справочное)
Окончание таблицы B .1
ТЕХНИЧЕСКИЙ КОДЕКС ТКП EN 1991-3-2009 (02250) |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Последнее изменение этой страницы: 2019-03-21; Просмотров: 639; Нарушение авторского права страницы





















 (2.1)
(2.1)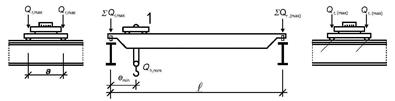

 (2.2)
(2.2)