|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Вертикальные нагрузки кранов: характеристические значения
(1) Характеристические значения вертикальных крановых нагрузок на опорные конструкции кранов должны определяться в соответствии с таблицей 2.2. (2)P Номинальные значения собственного веса крана и грузоподъемности, указанные поставщиком крана, должны приниматься в качестве характеристических значений вертикальных нагрузок. Таблица 2.4 — Коэффициенты динамичности j i для вертикальных нагрузок
(3) Если коэффициенты динамичности j1, j2, j3 и j4, указанные в таблице 2.1, не включены в технические условия поставщика, можно воспользоваться указаниями, приведенными в таблице 2.4. (4) В отношении соответствующих значений при эксплуатации в ветреных условиях за справками необходимо обратиться к приложению A. Таблица 2.5 — Значения b 2 и j 2, min
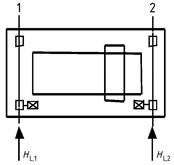
Горизонтальные нагрузки кранов: характеристические значения Общие положения (1)P Номинальные значения эффектов ускорения и перекоса, указанные поставщиком крана, должны приниматься в качестве характеристических значений горизонтальных нагрузок. (2) Характеристические значения горизонтальных нагрузок могут быть заданы поставщиком крана или определены в соответствии с 2.7.2 – 2.7.5. 2.7.2 Продольные силы H L , i и поперечные силы H T , i , вызванные ускорением и торможением крана (1) Продольные силы H L , i, вызванные ускорением и торможением конструкции крана генерируются движущей силой на поверхности соприкосновения рельса и ведомого колеса, см. рисунок 2.5. (2) Продольные силы HL,i, приложенные к балке подкранового пути можно рассчитать следующим образом:
где n r — количество балок подкранового пути; K — движущая сила согласно 2.7.3; j5 — коэффициент динамичности, см. таблицу 2.6; i — целое число, идентифицирующее балку подкранового пути (i = 1, 2).
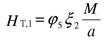
1 — рельс i = 1; 2 — рельс i = 2 Рисунок 2.5 — Продольные горизонтальные силы H L , i (3) Момент M, результирующий из движущей силы, которая должна быть приложена к центру массы, уравнивается поперечными горизонтальными силами H T,1 и H T,2, см. рисунок 2.6. Горизонтальные силы можно рассчитать следующим образом:
a — интервал между направляющими роликами или колесами с ребордами;
l — пролет эстакады моста; φ5 — коэффициент динамичности, см. таблицу 2.6; K — движущая сила, см. 2.7.3 и рисунок 2.7.
1 — рельс i = 1; 2 — рельс i = 2 Рисунок 2.6 — Определение поперечных сил H T , i (4) Для изогнутых балок подкранового пути результирующую центробежную силу следует помножить на коэффициент динамичности j5. (5) Если коэффициент динамичности j5 не включен в детализированную документацию поставщика крана, можно использовать значения, приведенные в таблице 2.6. Таблица 2.6 — Коэффициент динамичности j 5
2.7.3 Движущая сила K (1) Движущая сила K на ведомом колесе должна быть такой, чтобы колесо не проскальзывало. (2) Значение движущей силы K должен представить поставщик крана. (3) Если не применяется система управления колесами, движущая сила K может быть рассчитана следующим образом:
где m — коэффициент трения; — для привода на одно колесо:
где mw — количество приводов на одно колесо; — для привода на среднее колесо:
Примечание 1 — В современных кранах обычно отсутствует привод на среднее колесо. Примечание 2 — Значение коэффициента трения может быть задано в национальном приложении. Рекомендуются следующие значения: m = 0,2 для сопряженных материалов стать ─ сталь; m = 0,5 для сопряженных материалов стать ─ резина.
1 — рельс i = 1; 2 — рельс i = 2 Рисунок 2.7 — Определение движущей силы K 2.7.4 Горизонтальные силы H S , i , j , k и направляющая сила S , вызванные перекосом крана (1) Направляющая сила S и поперечные силы H S , i , j , k , вызванные перекосом, можно рассчитать из:
где f — “неположительный коэффициент”, см. (2); lS,i,j,k — коэффициент электромеханической связи, см. (4); i — рельс i; j — колесная пара j; k — направление действия силы (L = продольное, T = поперечное). (2) «Неположительный» коэффициент можно определить из:
где a — угол перекоса, см. (3). (3) Угол перекоса a, см. рисунок 2.8, который должен быть равен или меньше 0,015 рад, следует выбирать с учетом промежутка между направляющим механизмом и рельсом, а также рационального разброса размеров и износа колес оборудования и рельсов. Его можно определить следующим образом: a = aF+ aV + a0 £ 0,015 rad (2.12) где aF, aV и a0 имеют значения, определенные в таблице 2.7. Таблица 2.7 — Определение a F , a V и a 0
Окончание таблицы 2.7
(4) Коэффициент электромеханической связи lS , i , j , k зависит от комбинации колесных пар и расстояния h между мгновенным центром вращения и соответствующим направляющим механизмом, а именно первыми по направлению движения, см. рисунок 2.8. Значение расстояния h может быть заимствовано из таблицы 2.8. Коэффициент электромеханической связи lS , i , j , k можно определить из выражений, приведенных в таблице 2.9.
1 — рельс i = 1; 2 — рельс i = 2; 3 — направление движения; 4 — направление рельса; 5 — направляющий механизм; 6 — колесная пара j; 7 — мгновенный центр вращения Рисунок 2.8 — Определение угла a и расстояния h Таблица 2.8 — Определение расстояния h
Таблица 2.9 — Определение значений l S , i , j , k
2.7.5 Горизонтальная сила H T , 3 , вызванная ускорением или торможением тележки мостового крана (1) Допустимо предположение, что горизонтальная сила HT,3, вызванная ускорением или торможением тележки мостового крана или подвесной тележки, покрыта горизонтальной силой HB,2, определенной в 2.11.2. Температурные эффекты (1)P Последствия воздействий на подкрановые пути в результате температурных колебаний должны приниматься во внимание по мере необходимости. В общем, нет необходимости учитывать неравномерное распределение температуры. (2) О разнице температуры подкрановых путей под открытым небом см. EN 1991-1-5. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Последнее изменение этой страницы: 2019-03-21; Просмотров: 435; Нарушение авторского права страницы
 где Dm — освобожденная или сброшенная часть подъемной массы; m — общая подъемная масса; b3 = 0,5 для кранов, оснащенных захватами или подобными устройствами с замедленным отпусканием; b3 = 1,0 для кранов, оснащенных магнитами или подобными устройствами с быстрым отпусканием
где Dm — освобожденная или сброшенная часть подъемной массы; m — общая подъемная масса; b3 = 0,5 для кранов, оснащенных захватами или подобными устройствами с замедленным отпусканием; b3 = 1,0 для кранов, оснащенных магнитами или подобными устройствами с быстрым отпусканием  (2.2)
(2.2)