
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
ПОНЯТИЯ ОБ УПРАВЛЕНИИ И СИСТЕМАХ УПРАВЛЕНИЯСтр 1 из 20Следующая ⇒
А.В. Меркулов
АСУ И МЕХАТРОНИКА Автомобилей и тракторов Конспекты лекций Специальность 23.05.01
Москва - 2017 ВВЕДЕНИЕ Окружающий нас мир представляет собой совокупность взаимосвязанных социальных, экономических, технических, биологических и иных систем, процесс функционирования каждой из которых включает получение информации и ее анализ, принятие решений и их исполнение, т. е. выполнение основных операций любого процесса управления. В наиболее общей трактовке это — организация целенаправленного взаимодействия энергии, вещества и информации. Приоритетной и конечной целью использования Информации является управление, т.е. выработка и реализация управляющих действий. Универсальность принципов управления позволяет применять их к объектам любой природы, в том числе к самим процессам получения, передачи и обработки информации. Таким образом, и сами процессы управления могут рассматриваться как объекты управления систем более высоких уровней иерархии. Дисциплина «АСУ и мехатроника А и Т» формирует у будущих инженеров и исследователей системное мышление и целостное видение явлений мира техники, природы, социальной среды, синтезирует знания студентов по математике, физике, другим естественным наукам, дает наглядные примеры их конструктивного применения. В последние годы практика проектирования и реализации алгоритмов управления претерпела значительные изменения, обусловленные интенсификацией производственных технологий, актуализацией проблем экологии, революционными достижениями в области получения, передачи и обработки информации. Применение непрерывно развивающихся компьютерных программ моделирования и имитации, анализа и синтеза систем управления в большинстве случаев устраняет вычислительные проблемы, связанные с исследованиями и разработками таких систем. Вместе с тем накопленный опыт позволяет утверждать, что расширение области применения теории управления, т.е. круга решаемых на ее основе задач, внедрение новых технологий исследования и проектирования систем управления относительно мало отразились на основах названной учебной дисциплины. По основам теории автоматического управления в нашей стране издан целый ряд учебников и учебных пособий. Однако они написаны относительно давно, и сохранившихся экземпляров в настоящее время недостаточно для обеспечения учебного процесса в технических вузах. Это связано с тем, что дисциплины «Теория автоматического управления» и «Теория управления» входят в состав федеральной компоненты Государственного образовательного стандарта многих специальностей и направлений высшего профессионального образования. Традиционное изложение основ теории управления обычно требует большого объема учебника, поскольку значительное место здесь уделяется вспомогательному материалу: математическим основам, способам, приемам и методикам упрощения вычислений, подробному описанию свойств типовых динамических звеньев и т. п. Изложение тех же основ в ряде книг по «современной» теории управления базируется на абстрактном, преимущественно формально-алгебраическом подходе, трудном для восприятия студентами при изучении фундаментальных свойств и раскрытии «механизмов» управления. В ряде учебников по основам теории автоматического управления материал систематизируется не по задачам теории управления, а по формам представления математических моделей (передаточные функции, структурные схемы или системы дифференциальных уравнений в матричной форме пространства состояний) и по методам расчета (частотные, графо-аналитические или временные, аналитические), что отражает не столько суть, сколько — этапы развития дисциплины. Характерной чертой структурных моделей, используемых в теории управления, отличающих их от динамических (поведенческих) моделей, рассматриваемых в других учебных дисциплинах, является причинно-следственный характер взаимодействий элементов систем, что отражает информационно-алгоритмический подход, принятый в теории управления. Часть 1. ОСНОВНЫЕ ПОНЯТИЯ ТЕОРИИ УПРАВЛЕНИЯ
ОБЪЕКТЫ УПРАВЛЕНИЯ
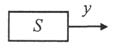
Объект управления (иначе, управляемый объект) реализует процесс, который необходимо организовать для достижения поставленных целей. В теории управления объект рассматривается как преобразователь переменных входа u ( t ), f ( t ) в переменную выхода, как это показаноно рис. 1.4. Цель управления, в первую очередь, определяет ограничения на переменную выхода объекта. Неконтролируемые воздействия среды называемые возмущениями, вызывают нежелательные отклонения выхода объекта. Для уменьшения влияния наобъект управления этих отклонений на объект оказывают соответствующие управляющие воздействия и( t ).
Рис. 1.4. Абстрактный объект управления
Если переменные входа и выхода объекта являются векторами, то объект называют многомерным. Например, задача управления подводной лодкой или самолетом (воздушным судном) связана с рассмотрением в качестве управляемых переменных не только курсового угла Теория управления изучает общие закономерности, присущие системам управления независимо от их природы. Объекты управления могут быть техническими, экономическими, биологическими, социальными, военными и др.
Технические объекты
Примерами технических объектов являются движущиеся объекты (суда, самолеты, автомобили), объекты энергетики (печи, теплообменники, парогенераторы, электрические генераторы, двигатели и другие преобразователи энергии), объекты химической промышленности (реакторы, автоклавы, мешалки и другие аппараты), объекты машиностроения и металлургии (станки и обрабатывающие центры, прокатные станы), бытовая техника (утюги, холодильники, кондиционеры, устройства бытовой электроники) и т. д. Управляемыми переменными для технических объектов являются физико-химические переменные, характеризующие их состояние или поведение (механические координаты, температура, электрическое напряжение, давление, концентрация компонентов в смесях и т. д.). Теория автоматического управления долгое время развивалась применительно именно к техническим системам, объекты которых наиболее изучены — во многих случаях для них имеются достаточно адекватные математические модели или возможность их аналитического построения.
Экономические объекты
Экономическими объектами являются: цех, завод, отрасль, предприятия торговли и сферы услуг, банки, страховые компании и т. п. Общим для них является то, что в качестве одной из обобщенных управляемых переменных рассматривается прибыль. Приведем простейшие примеры таких объектов и соответствующих задач (целей) управления.
Пример 1. Задача определения оптимального объема заказа. Фирма потребляет некоторую продукцию в одном и том же объеме М единиц в неделю и должна регулярно возобновлять заказы для пополнения запасов. Каждый очередной заказ независимо от его объема сопряжен с некоторыми накладными расходами К по размещению заказа и его реализации. С другой стороны, с хранением приобретаемой продукции связаны расходы на складирование, страхование и содержание складских помещений. Допустим, что за хранение единицы потребляемой продукции в течение недели взимается плата в размере h . Обозначим через Q объем заказа. Управляемой переменной в таком объекте является среднее значение суммарных затрат в расчете на одну неделю СЗ. Накладные расходы К и расходы на хранение h принимаются за возмущения. Целью управления является минимизация значения управляемой переменной.
Пример 2. Динамическая задача управления запасами. Пусть необходимо разработать календарную программу выпуска некоторого изделия на плановый период, состоящий из N. отрезков. Предполагается, что для каждого из этих отрезков имеется точный прогноз спроса на выпускаемую продукцию, причем для разных отрезков спрос неодинаков. На экономические показатели производства влияют объемы изготовляемых партий, поэтому фирме нередко бывает выгодно выпустить на каком-то отрезке времени продукцию в объеме, превышающем спрос в пределах этого отрезка, и хранить излишки, используя их для удовлетворения последующего спроса. Задачей управления является реализация такой программы выпуска, при которой общая сумма затрат на производство и содержание запасов минимизируется при условии полного и своевременного удовлетворения спроса на продукцию. Здесь оптимальное управление ищется в виде функции дискретного времени.
Пример 3. Задача планирования производства. Фирма выпускает два типа тяжелого оборудования — землеройные машины (Е) и машины для лесоразработок ( F ). Прогнозирование спроса показало, что можно продать столько машин типа Е и F , сколько фирма может произвести. Фирма получает прибыль $5000 от продажи каждой машины типа Е и $4000 — машины типа F . Оборудование производится в двух филиалах фирмы А и В, каждый из которых располагает бюджетом времени в 100 ч. Производство одной машины Е требует 10 ч в филиале А и 20 ч — в филиале В. Производство одной машины требует 16 ч в филиале А, 10 ч — в филиале В. Для сохранения позиций фирмы на рынке необходимо производить не менее одной машины F на каждые три машины Е. Основной потребитель заказал в сумме не менее 5 машин в любой комбинации. Объект управления в данном примере имеет два управляющих воздействия — объемы выпуска машин типа Е и типа F . Управляемая переменная — прибыль Р должна быть максимальной при удовлетворении ограничений. Это цель управления. Разнообразные по характеру своей деятельности организации производственной и непроизводственной сфер, представляют собой сложные объекты, экономическая эффективность функционирования которых существенно зависит от качества организационного управления. Научной дисциплиной, занимающейся решением задач такого управления, является исследование операций. Методами исследования операций решаются задачи управления деятельностью той или иной организации, в частности, задачи календарного планирования производства и управления запасами, задачи комплектования штатов и др. Сюда же относится определение ассортимента выпускаемой продукции, разработка долгосрочных программ расширения производства, проектирования сети складских помещений в системе оптовой торговли и т.д. Управление экономическими объектами является задачей, вообще говоря, более сложной, чем управление техническими объектами. Одна из причин заключается в том, что в современной экономике производственно-технические, конъюнктурно-коммерческие и прочие факторы находятся в сложной взаимной зависимости, а внешние экономические факторы содержат элементы неопределенности. Принятие управленческих решений, которые были бы одновременно и реальными, и экономически выгодными, является достаточно сложной задачей.
Биологические системы Живые системы — от простейших клеток до сложных организмов — поддерживают свою жизнедеятельность благодаря действию в них механизма управления. Процессы управления в живом организме регулируют ритм сердца и дыхания, температуру тела и т. д. В живой природе механизмы управления настолько органично встроены в объекты, что не всегда можно выделить такие функциональные элементы, присущие техническим системам, как объект управления, измерительные элементы, управляющие устройства и исполнительные механизмы. Однако и здесь методы теории управления помогают исследователю глубже понять процессы. Для демографов, экологов, эпидемиологов, микробиологов и других специалистов большой практический интерес представляют модели управления, объясняющие механизмы изменения численности биологических популяций (саморегуляция). Такие модели могут оказаться полезными и для принятия решений в области биологического управления, например, обосновать целесообразность использования при борьбе с насекомыми-вредителями ядохимикатов или безопасных мер биологического характера (в частности, естественных врагов этих вредителей).
Компенсация возмущений Возмущения — воздействия среды на объект, вызывающие отклонения управляемой переменной от заданных значений или программ изменения. Если о возмущении на объект имеется полная априорная информация, то она может быть учтена при расчете оптимального управления, обеспечивающего желаемое движение объекта. В некоторых случаях основное возмущение на объект можно измерять непосредственно, т. е. доступна текущая информация о причине отклонений. Используя эту информацию, можно компенсировать отклонения управляемой переменной, оказывая на объект дополнительное воздействие. В простейшем случае компенсирующее воздействие суммируется с управлением, как это показано на рис. 1.10. В результате получаем систему, также реализующую принцип разомкнутого управления. Алгоритм обработки текущей информации о возмущении в компенсаторе К с целью вычисления компенсирующего воздействия, строится на базе информации о характеристиках объекта по каналам управления и возмущения. Наличие текущей информации о возмущении, т. е. о причине отклонений, дало возможность формирования в системе второго (искусственного) пути из точки приложения возмущения к выходу объекта. Наличие такого пути является необходимым условием реализации абсолютной инвариантности управляемой переменной к непосредственно измеряемому возмущению (так называемый принцип двухканалъности).
Рис. 1.10. Разомкнутая система с компенсацией возмущения
Для работоспособности системы управления с компенсацией возмущения необходимо, чтобы заданный режим объекта был устойчив, а другие (некомпенсированные) возмущения были слабыми. Например, судном нельзя управлять длительное время без коррекции курса по выявленному отклонению. Это объясняется тем, что судно является нейтральным в смысле устойчивости объектом, накапливающим отклонения.
Адаптивное управление Несмотря на то, что в системах компенсации параметрических возмущений и происходит подстройка параметров, такие системы не принято называть самонастраивающимися. Системы управления с самонастройкой или, в общем случае, с адаптацией получают информацию об изменениях свойств объекта путем текущей идентификации. Это значит, что каким-либо способом оцениваются следствия параметрических воздействий среды на объект. Текущая информация об отклонениях свойств объекта используется для принятия решения о подстройке параметров управляющих устройств и/или регуляторов. На рис. 1.13 изображена структура адаптивной (самонастраивающейся) системы. Как и в предыдущем случае, следящая система, образованная объектом ОУ и регулятором Р, нуждается в подстройке параметров регулятора из-за изменений свойств объекта. Поскольку причины, вызывающие эти изменения, непосредственно нельзя измерять, остается оценивать их следствие. В устройстве текущей идентификации И путем обработки данных о входе и и выходе у объекта оцениваются отклонения его характеристик. На базе этой информации в блоке адаптации А вычисляются новые значения параметров регулятора Р. Здесь реализуется принцип отрицательной (параметрической) обратной связи — образуется замкнутый контур передачи и обработки информации для ослабления параметрических возмущений среды.
Рис. 1.13. Адаптивная система управления
Заметим, что замкнутый основной контур системы, образованный объектом и регулятором, можно трактовать как объект управления системы более высокого (второго) уровня иерархии. Управляющим воздействием системы второго уровня являются изменения значений параметров регулятора системы первого уровня, а возмущением — параметрические воздействия среды. Роль измерительного элемента в системе второго уровня играет устройство текущей идентификации И, а регулятора — блок настройки А. В блоке А по вариациям характеристик объекта или отклонениям показателей качества вычисляются параметры регулятора Р, из условия сохранения заданных показателей качества системы нижнего уровня иерархии. Это так называемая самонастраивающаяся система управления. В более общем случае целью адаптивной системы является оптимизация показателей качества, т. е. настройка регулятора связана с поиском экстремума некоторого функционала. ЗАДАЧИ ТЕОРИИ УПРАВЛЕНИЯ
Основными задачами теории управления являются анализ и синтез систем управления. Под анализом понимается выявление и количественная оценка свойств поведения, а также объяснение свойств систем через характеристики элементов и способ их взаимосвязи. Важнейшими свойствами объектов и систем управления являются: устойчивость движений, инвариантность к возмущениям и робастность (грубость, малая чувствительность). Синтез предполагает выбор элементов и связей между ними таким образом, чтобы система имела требуемое поведение. Таким образом, синтез является задачей, обратной по отношению к анализу. Ясно, что для систем управления в технике имеют важное значение и такие показатели, как надежность, масса и габариты, энергопотребление, стоимость и эксплуатационные расходы, внешний вид и др. За дача обеспечения соответствия этих показателей требованиям решается в процессе проектирования систем управления. Эта задача выходит за рамки теории управления, в которой доминирует поведенческий аспект. Решение задач анализа и синтеза на реальных объектах возможно в редких случаях. Как правило, это требует много времени, дорого, опасно и не всегда осуществимо. Действительно, управляемый процесс может быть очень длительным (печи и другие тепловые объекты), эксперименты — дорогими (запуск космических ракет) и опасными (ядерные реакторы). Кроме того, объект управления зачастую проектируется вместе с системой управления. Задачи анализа и синтеза в некоторых случаях можно решать с использованием физических моделей (аналогов) объектов. Теория управления имеет дело с математическими (символьными) моделями. Построение математических моделей объектов и систем управления также является задачей теории управления и смежных с ней дисциплин. Математические модели позволяют решать задачи анализа и синтеза аналитически (расчетным путем) и путем имитации систем управления на компьютерах.
Классы моделей Модель объекта или системы управления принадлежит тому же классу, что и описывающий их оператор преобразования. Разумеется, что можно говорить о классе только математической модели, а не реальной системы. Таким образом, выделяют следующие признаки классов систем с непрерывным и дискретным временем: • линейные (Л) или нелинейные (Д); • стационарные (С) или нестационарные (С); • детерминированные (Д) или стохастичные (Д); • сосредоточенные (конечномерные) (К) или распределенные (бесконечномерные). Эти четыре независимых признака биальтернативны; поэтому можно насчитать всего 24 = 16 классов непрерывных и столько же — дискретных систем. Простейший класс ЛСДК — линейные стационарные детерминированные конечномерные системы. Они имеют форму обыкновенных линейных дифференциальных (разностных) уравнений с постоянными детерминированными коэффициентами. В математике разработан весьма развитый аппарат анализа этого класса систем. При построении моделей стремятся к их максимальной простоте при достаточной адекватности оригиналам. Поэтому в первом приближении часто ограничиваются описанием объектов управления в классе ЛСДК. Более сложные классы операторов получаются при введении одного из альтернативных признаков:
Для таких систем существует незначительное число общих методов аналитического исследования; в основном, они разработаны только для частных случаев. Операторы второго уровня сложности получаются введением двух отрицаний
При трех отрицаниях получаем операторы третьего уровня сложности:
Наконец операторы четвертого уровня сложности
— нелинейные нестационарные стохастичные бесконечномерные. Им, например, соответствуют нелинейные дифференциальные уравнения в частных производных с переменными случайными параметрами. Для систем, описываемых операторами второго и выше уровней сложности, как правило, имеется только единственная возможность их анализа и синтеза путем вычислительных экспериментов. Если модель системы образована элементами различных классов, то класс системы определяется классом элемента с максимальным числом отрицаний. Автономные системы Система называется автономной, если на нее не действуют внешние силы, в том числе параметрического типа. Автономные системы, таким образом, стационарны. Изменение их состояния происходит в силу накопленной ранее энергии. На рис. 1.19 модель среды представлена в виде автономной системы, имеющей выход, но не имеющей входов.
Рис. 1.19. Автономная система
Дифференциальные уравнения автономных систем включают переменные системы и их производные, но не содержат переменных, описывающих воздействия среды и имеют постоянные параметры. Это так называемые однородные дифференциальные уравнения
дополняемые начальными условиями:
Начальные условия являются следствием предыстории системы и вместе с дифференциальными уравнениями полностью определяют поведение автономной системы. Если система автономна, то ее движения называют свободными. В случае автономных систем с дискретным временем будем иметь однородные разностные уравнения:
Модели среды Среда на входе системы моделируется автономными системами - генераторами воздействий (см. рис. 1.19) или преобразователями типовых воздействий — фильтрами. Распространенными типовыми сигналами, моделирующими детерминированное воздействие, являются единичные импульсная и ступенчатая функции. Примером типового случайного воздействия является так называемый «белый шум». Среда может моделироваться динамической системой того же класса, что и сама система управления. Однако часто рассматриваются детерминированные системы со случайными воздействиями на входе.
СПОСОБЫ ПОСТРОЕНИЯ МОДЕЛЕЙ
В зависимости от характера и объема априорной информации об объекте исследования выделяют два способа построения моделей систем управления в формах, принятых в теории управления: 1 — аналитический; 2 — экспериментальный.
Аналитический способ Аналитический способ применяется для построения моделей объектов хорошо изученной природы. В этом случае имеется вся необходимая информация о свойствах объекта, но она представлена в другой форме. В результате идеализации физических объектов появляются структурные модели в виде схем с сосредоточенными компонентами (рис. 1.20, а). Типичными представителями физических систем, допускающих такое представление, являются электрические и механические объекты. На рис. 1.20,б изображена электрическая схема; рис. 1.20,в представляет собой пример механической поступательной системы.
Рис. 1.20. Физические системы с сосредоточенными компонентами (о): электрическая схема (б) и механическая поступательная система (в)
Подобные схемы являются моделями, в которых информация об интересующих свойствах объекта представлена в наглядной форме с использованием графических образов, отражающих физическую природу явлений, устройство и параметры объектов. На таких моделях базируются соответствующие дисциплины, например теоретическая электротехника и теоретическая механика. По существу, принципиальные схемы суть стационарные линейные модели с сосредоточенными компонентами (конечномерные), только представлены они с использованием обозначений, принятых соответственно в электротехнике и механике. Методы теории управления абстрагируются от конкретной природы объектов и оперируют более общими — математическими (символьными) моделями. Аналитический способ моделирования складывается из этапа построения схемы объекта и ее дальнейшего преобразования в математическое описание требуемой формы. При этом принципиальные проблемы моделирования решаются на первом — неформальном этапе. Второй этап, no-существу, оказывается процедурой преобразования форм представления моделей. Это позволяет разработать различные компьютерные программы, позволяющие автоматизировать составление уравнений по схемам. Рассмотрим примеры составления дифференциальных уравнений электрического и механического объектов. Ограничимся классом линейных стационарных моделей.
Электрическая схема Существует три типа пассивных электрических двухполюсников — резистор R , конденсатор С и катушка индуктивности L — описываемых следующими уравнениями для токов i ( t ) и напряжений u ( t ):
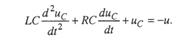
Активными двухполюсниками электрических схем являются источник напряжения и источник тока. Уравнения связи двухполюсников в конкретной схеме выражаются законами Кирхгофа (Kirchhoff G. R.), представляющими собой условия непрерывности токов и равновесия напряжений: 1 — сумма токов в любом узле равна нулю; 2 — сумма напряжений в любом контуре равна нулю. Рассмотрим пример электрической схемы, изображенной на рис. 1.20, б. Пусть выходом схемы является напряжение на конденсаторе uc ( t ). В соответствии с первым законом имеем:
Второй закон для единственного контура запишется так:
Выражая напряжения ur и ul через ис :
получим дифференциальное уравнение второго порядка:
Экспериментальный способ Если свойства объекта познаны в недостаточной степени, либо про исходящие явления слишком сложны для аналитического описания, для построения математических моделей реально существующих объектов применяется экспериментальный способ. Этот способ заключается в активных экспериментах над объектом или в пассивной регистрации его поведения в режиме нормальной эксплуатации (рис. 1.21, а). В результате обработки данных наблюдений получают модели в требуемой форме. Совокупность этих операций объединяется термином «идентификация объекта». В результате идентификации получаются модели вход-выход (рис. 1.21, б).
Рис. 1.21. Экспериментальное исследование системы (а) и модель вход-выход (б)
Очевидно, модель зависит не только от свойств объекта, но также от входных сигналов, их разнообразия. Практически об идентифицируемом объекте всегда имеется какая-то априорная информация, т. е. он не является «черным ящиком». Это дает возможность комбинировать оба способа — вначале аналитически строить структуру модели и определять начальные приближенные значения параметров, а далее обработкой экспериментальных данных уточнять их значения.
МОДЕЛИ ВХОД-ВЫХОД
Основными формами представления операторов преобразования входных переменных f ( t ) в переменные выхода являются: дифференциальные уравнения, передаточные функции, временные и частотные характеристики. Для одномерных систем переменные J ( t ) являются скалярами. Эти и некоторые другие представления операторов рассматриваемого класса моделей могут быть приняты за основу задания динамических свойств в терминах вход-выход. Если для конкретных исследований та или иная форма оказывается более предпочтительной, ставится и решается задача перехода от одной формы к другой, например, построения временных и частотных характеристик по дифференциальному уравнению или передаточной функции.
Дифференциальные уравнения Обыкновенное линейное дифференциальное уравнение i-го порядка с постоянными коэффициентами обычно записывается так:
Если ввести оператор дифференцирования по времени
то уравнение (2.1) запишется в компактном виде
где А(р) = апр" + ... + а1р + а0; В(р) = bmpm + ... + b 1 р + b 0 — операторные полиномы. Дифференциальное уравнение дополняется начальными условиями y(0), y’(0), y(n-1)(0).
Передаточные функции Передаточная функция равна отношению изображений по Лапласу переменных выхода и входа при нулевых начальных условиях
где интегральное преобразование Лапласа (P. Laplace) определяется так:
Преобразуя дифференциальное уравнение (2.1) при нулевых начальных условиях, получаем алгебраическое уравнение для изображений A ( s ) Y ( s ) = B ( s ) F ( s ). Отсюда следует, что передаточная функция легко записывается по дифференциальному уравнению
и, наоборот, по передаточной функции сразу записывается дифференциальное уравнение. Зная передаточную функцию и изображение переменной входа, легко найти изображение выхода
Пример 1. Пусть система описывается дифференциальным уравнением второго порядка
Преобразуем уравнение по Лапласу, для чего воспользуемся свойством линейности оператора преобразования L , а также теоремой о дифференцировании оригинала
Последнее уравнение перепишем в другом виде:
При нулевых начальных условиях y(0)=y’(0)=0 отношение изображений, т. е. передаточная функция равна
Оператор, связывающий вход и выход, можно задать коэффициентом и множествами нулей (корней полинома числителя) z;j=1,...,т, и полюсов (корней полинома знаменателя) pi ; i = 1,..., п, передаточной функции (2.3)
В отличие от полиномиальной формы (2.3), эту форму задания передаточных функций иногда называют факторизованной. Вводится понятие структуры оператора преобразования. Для дифференциального уравнения i-го порядка (2.1) и передаточной функции (2.3) задание структуры означает задание целых чисел —- степеней п = deg А и т = deg В полиномов А и В. Параметрами оператора являются коэффициенты полиномов.
Временные характеристики Временные характеристики являются одной из форм представления операторов преобразования переменной f ( t ) в переменную y ( t ). Импульсная переходная функция или функция веса w ( t ) — реакция системы на единичный идеальный импульс при нулевых начальных условиях. Переменная выхода определяется как интеграл свертки
т. е. в этом случае оператор преобразования имеет форму интегрального уравнения. Другая, часто употребляемая временная характеристика — переходная характеристика h ( t )—реакция системы на единичную ступенчатую функцию 1(t) при нулевых начальных условиях. На рис. 2.1 приведен примерный вид временных характеристик для системы второго порядка.
Рис. 2.1. Временные характеристики: а — функция веса; б — переходная характеристика
Частотные характеристики Частотные характеристики элементов и систем представляют собой зависимость параметров установившихся реакций на Гармонические сигналы всех частот и единичных амплитуд. В линейных системах форма и частота установившейся реакции совпадают с формой и частотой сигнала на входе. Комплексная частотная характеристика W ( j
где R(
Если частота изменяется в логарифмическом масштабе, то логарифмические амплитудно-частотные характеристики (ЛАЧХ) во многих практически важных случаях мало отличаются от прямолинейных асимптот с наклонами, кратными 20 дБ/дек. На рис. 2.3 приведен примерный вид асимптотической ЛАЧХ; пунктирная линия — точная ЛАЧХ. Там же указаны наклоны асимптот в дБ/дек. Передаточные функции, все нули и полюсы которых находятся в левой полуплоскости, называют минимально-фазовыми. Такие передаточные функции соответствуют меньшим по модулю фазовым сдвигам по сравнению с любыми другими передаточными функциями, имеющими ту же ЛАЧХ, но часть нулей и/или полюсов справа от мнимой оси. Для примера на рис. 2.4 изображены АФХ, ЛАЧХ и ЛФЧХ для двух передаточных функций:
Рис. 2.2. Пример АФХ Рис. 2.3. Пример ЛАЧХ
Вторая из них имеет правый нуль; ее ЛФЧХ
где
Рис. 2.4. Примеры АФХ (а), ЛАЧХ и ЛФЧХ (б) минимально-фазовой и неминимально-фазовой передаточных функций.
2.1.5. Преобразование форм представления моделей вход-выход Несмотря на то, что любая из форм представления операторов может быть принята за основу задания динамических свойств систем, для конкретных исследований та или иная форма оказывается более рациональной. Возникает необходимость перехода от одной формы к другой. Многие задачи анализа связаны с преобразованием формы представления оператора. В ряде случаев эта процедура составляет наиболее трудоемкий этап анализа — построение частной модели — приведение к форме, позволяющей непосредственно вычислить показатели качества и вывести суждение о соответствии поведения системы заданным требованиям (например, построение временных или частотных характеристик системы управления). Переходы между различными формами представления операторов удобно рассматривать как дуги орграфа, вершинам которого соответствуют формы представления, как это изображено на рис. 2.5. Наиболее прост формальный переход путем замены оператора дифференцирования р=d / dt на комплексный аргумент s от дифференциального уравнения (2.2) к передаточной функции (2.3) и обратно. Осуществляя переход к передаточным функциям, следует избегать сокращения общих делителей полиномов числителей и знаменателей, т.е. диполей рациональных функций. Такое сокращение приводит к потере части собственных составляющих движения при ненулевых предначальных условиях (составляющих свободных движений).
Рис. 2.5. Орграф взаимосвязи форм представления операторов
ДУ — дифференциальное уравнение; ЧХ — частотные характеристики; ПФ — передаточная функция; ВХ — временные характеристики Пунктирные линии графа взаимосвязи (см. рис. 2.5) отвечают переходам, рассматриваемым обычно в задачах идентификации. По временным и/или частотным характеристикам, полученным экспериментально, оценивают параметры передаточных функций или ординаты характеристик иного типа. Такие переходы оказываются неоднозначными, а их результаты зависят от выбора структуры оператора и алгоритма обработки данных.
ПОЛНОТА ХАРАКТЕРИСТИК
Пусть оператор преобразования входного воздействия объекта или системы управления f ( t ) в выходную переменную y ( t ) представлен в форме дифференциального уравнения n-го порядка (2.1) или в форме передаточной функции (2.3). Рассмотрим формулу (2.13) для реакции системы на воздействие f(t) при нулевых предначальных условиях. Если имеет место условие
где s — корень характеристического полинома
то коэффициент Сi при экспоненте
равняется нулю при любом воздействии. По реакциям такой системы нельзя полностью выявить ее собственные свойства — в реакциях будет отсутствовать составляющая (мода), соответствующая корню si . В этом случае говорят, что по рассматриваемой паре вход-выход система является неполной. Временные характеристики — реакции на воздействия при нулевых предначальных условиях — не отражают полностью собственных свойств системы по неполной паре вход-выход. Операторные полиномы А и В дифференциального уравнения (2.2) неполной системы имеют нетривиальный общий делитель (р-si), a передаточная функция (2.3) имеет диполь si Если полиномы А и В не являются взаимно простыми, то передаточную функцию называют вырожденной. Годографы вырожденных передаточных функций
построенные при изменении аргумента s вдоль некоторого контура С на комплексной плоскости, в частности, вдоль мнимой оси s =jω; ω≥0, т. е. частотные характеристики также отражают только полную часть системы. Потеря части собственных свойств систем особенно существенна, если si—правый корень. Сокращение вырожденной передаточной функции не рекомендуется. В случае правого полюса сокращение просто недопустимо. При ненулевых начальных условиях, например, вызванных воздействиями, приложенными к другим входам системы, появляются свободные движения. Если эти начальные условия таковы, что
то, как следует из (2.14), свободные движения содержат моду exp{ sit }. Свойство полноты относится к модели типа MYSF—системы со связями со средой — это свойство конкретной передачи. Если даны операторные полиномы А(р) и В(р) или полиномы знаменателя A ( s ) и числителя B ( s ) передаточной функции объекта или системы управления по выбранной паре вход-выход, наличие общих делителей или диполей можно выявить несколькими способами. Во-первых, можно вычислить и непосредственно сопоставить корни полиномов A и В. Это наилучший способ, здесь выявляются и приближенные диполи передаточных функций. Во-вторых, выявить наибольший общий делитель полиномов делением их по алгоритму Евклида. В-третьих, можно исследовать результат полиномов — специальный определитель порядка т + п, построенный из коэффициентов полиномов А и В. Полиномы имеют по меньшей мере один общий корень, если их результант равен нулю.
Правило Крамера Правило Крамера (G. Cramer) удобно применять в случае, когда требуется вычислить передаточную функцию, связывающую одну из выходных переменных у = х с одним из воздействий:
где полиномиальная матрица Аqr получена из матрицы А заменой q-го столбца r-ым столбцом матрицы В. Знаменатель передаточной функции Wqr ( s ) независимо от номеров входа r и выхода q один и тот же — он равен характеристическому полиному системы
Этот способ построения моделей вход-выход по системе уравнений (2.20) сводится к вычислению определителей полиномиальных матриц. Для примера (2.21) запишем систему в матричной форме (2.20); матрицы имеют вид:
В соответствии с правилом Крамера определяем характеристический полином и числитель передаточной функции W 21 ( s ) (здесь r = 1, q = 2):
Матричный способ Пусть имеем систему алгебраических уравнений многомерной системы, записанную для изображений переменных (2.20). В общем случае передаточная матрица системы, т. е. модель вход-выход через полиномиальные матрицы выражается так:
Здесь вычисления связаны с обращением и перемножением полиномиальных матриц. Ясно, что полиномиальная матрица системы A(s) должна быть неособенной, а значит, ее определитель не равен тождественно нулю. Известно, что
где A*(s)— присоединенная матрица. Следовательно, выражение для; передаточной матрицы примет вид
Для примера одномерной системы (2.24) характеристический полином A ( s ) вычислен ранее. Матрица А*, присоединенная к А, выглядит так:
Числитель передаточной функции вычислим по формуле из (2.26):
В случае одномерной системы (К = Р) полиномиальную матрицу числителя передаточной матрицы можно также вычислять как определитель следующей блочной матрицы:
Действительно, если воспользоваться леммой Шура (I. Schur), то искомый определитель раскроется так:
Учтем, что
и после сокращения получим выражение для числителя
Составим блочную матрицу (2.27) для рассматриваемого примера и раскроем ее определитель:
Получим тот же результат.
Структурные схемы (С-графы) Структурная схема представляет собой причинно-следственную связь звеньев. Линейное звено (рис. 2.6, а) в общем случае имеет любое число входов; оно преобразует сумму входов в единственную переменную выхода по некоторому оператору w.(pnc. 2.6, б)
Рис. 2.6. Линейное звено
В частном случае оператора тождественного преобразования звено выступает как сумматор. Структурная схема является ориентированным графом и состоит из множества вершин W = {w1 ..., wn} и множества дуг Х= {(wi, wj)} — упорядоченных пар вершин. Дугам графа соответствуют переменные х i ; i =1,...,N , а вершинам — звенья. Для того чтобы отличать рассматриваемый граф от сигнальных графов других типов, назовем его С-графом. На языке теории бинарных отношений С-граф определяется как пара множеств
а структурная схема — геометрический образ — называется также диаграммой графа (рис. 2.7). Вершина С-графа — звено общего вида, по определению суммирует переменные заходящих дуг. Это позволяет отказаться от специального элемента суммирования, что отличает С-графы от классических структурных схем.
Рис. 2.7. Структурная схема (С-граф)
Дуга С-графа — элемент (w, wi отношения X— задает причинно-следственную связь между двумя звеньями, причем, выход у'-го звена является входом z'-го. Дуге соответствует переменная х . Теоретико-множественное описание систем дает естественный способ ввода и редактирования моделей систем управления как последовательного раскрытия неопределенности. Для этого модели упорядочиваются по рангам неопределенности R = 0, 1, 2, 3. Множество W звеньев задает модель нулевого ранга MS (0). Для примера С-графа, диаграмма которого изображена на рис. 2.7, множество перечисляется так:
В случае однотипных звеньев можно ограничиться заданием числа вершин графа (звеньев), т.е. мощности множества W - N = 4. Дополнение модели Мs(0) множеством X дает модель первого ранга Ms (1) — это топология (топография) системы. Для примера С-графа (см. рис. 2.7) множество перечисляется так:
В перечислении приведены только индексы (номера) звеньев. Дальнейшее раскрытие неопределенности достигается при задании структур операторов вершин. Для рассматриваемого класса систем передаточные функции являются отношениями полиномов:
Задание их структур сводится к указанию степеней т i и п i полиномов Bi и А i . Когда для всех звеньев заданы структуры операторов, образуется модель системы структурного ранга Ms (2). Пусть для рассматриваемого примера системы (см. рис. 2.7) передаточные функции звеньев имеют вид:
W1(s) = k1,; W2(s) = k2 /(1+T2s)2 ; W3(s) = -1; W4(s) = -τ4s/(1+T4s).
Информацию о структурах операторов можно закодировать массивами степеней полиномов числителей и знаменателей передаточных функций:
Результатом конкретизации значений всех коэффициентов полиномов является полностью определенная модель третьего, параметрического ранга Ms (3). Выше изложено описание собственно системы (автономной системы). Для описания связей системы со средой следует указать звено, ко входу которого подается воздействие, и звено, выход которого является j выходом системы. На примере С-графа (см. рис. 2.7) номер входного звена r = 1, а выходного — q = 2. В результате оказывается определенной модель системы со связями со средой MYSF (3). При изучении влияния вариаций звеньев на характеристики системы указывается варьируемое звено. На рис. 2.7 им является звено w2.
Сигнальные графы Сигнальный граф или граф Мэзона (S. J. Mason) является одной из j удобных в теории и расчетной практике форм представления моделей систем управления. Модель системы в форме сигнального графа определяется как бинарное отношение Wna множестве переменных Х= {х,...,х}:
Элементам отношения W ={( xi , xj )} ставятся в соответствие операторы преобразования переменных. На диаграммах сигнальных графов переменным отвечают вершины, где суммируются сигналы заходящих дуг, а элементам отношения — дуги. Способы задания моделей различных рангов в форме сигнальных графов — те же, что и для С-графов. На рис. 2.8 изображена диаграмма сигнального графа — модель топологического ранга, несущая ту же информацию о системе, что и структурная схема (см. рис. 2.7).
Рис. 2.8. Диаграмма сигнального графа
В заключение подчеркнем, что формы представления моделей и способы их отображения могут быть различными — символьными или алгебраическими (уравнения, матрицы), геометрическими или топологическими (диаграммы графов). Однако информация о моделях различных рангов R последовательно раскрывается описанием множеств, задающих: R = 0 — состав элементов; R = 1 — топологию причинно-следственных связей между ними; R = 2 — структуры операторов; R = 3 — параметры.
Уравнений Пусть в каждой строке i = 1, ..., N системы уравнений (2.16) присутствует член с переменной х i которая является следствием остальных переменных. Диагональный оператор назовем собственным оператором звена, описываемого i-м уравнением. Недиагональные полиномы А ij (р); i ≠ j , и Bir ( p ) являются операторами воздействий на входе i-гo звена. Таким образом, причинно-следственная система уравнений отличается от непричинно-следственной тем, что конкретизируется j порядок перечисления уравнений, причем, А ij (р)≠0; i=1,..., N . Если система автономна, то Bir ( p ) = 0; i =1,..., N , r = 1,..., Р. Заметим, что пары индексов ненулевых полиномов А ij (р); i ≠ j в точности образуют элементы бинарного отношения модели в форме С-графа.
ПРЕОБРАЗОВАНИЕ ФОРМ ПРЕДСТАВЛЕНИЯ МОДЕЛЕЙ С РАСКРЫТОЙ СТРУКТУРОЙ
Формула Мэзона Пусть исходная модель представлена в форме структурной схемы (С-графа) или сигнального графа Мэзона. Для вычисления передаточной функции можно: • записать систему уравнений (2.16) и воспользоваться формулой (2.22); • провести последовательную топологическую редукцию графов по правилам эквивалентных преобразований; • применить топологическую формулу Мэзона. Формула Мэзона для получения передаточных функций сигнальных графов является топологическим аналогом правила Крамера. Прежде всего введем несколько понятий из теории сигнальных графов. Путем в графе называется последовательность вершин и дуг, в которой каждый элемент встречается только раз. Контур — замкнутый путь. Контуры называются некасающимися, если они не имеют общих вершин. Передаточные функции путей и контуров равны произведению передаточных функций образующих их дуг. Передаточная функция графа от вершины r (вход) до вершины q (выход) равна
где Δ(s)— определитель графа:
причем Kk ( s ) — передаточные функции контуров графа; Kk ( s ) Kl ( s ) — произведения передаточных функций некасающихся пар контуров; Kk ( s ) Kl ( s ) Km ( s ) — произведения передаточных функций попарно некасающихся троек контуров; Ppqr( s )—передаточная функция р-го пути в графе от вершины r до вершины q ; Δpqr( s ) — минор p-го пути, равный определителю подграфа, полученного удалением из исходного графа p-го пути.
Пример 8. Рассмотрим диаграмму графа, изображенную на рис. 2.8. Граф имеет два касающихся контура с передаточными функциями:
Определитель графа равен:
Между вершиной входа f и вершиной выхода y имеется один путь с передаточной функцией
После удаления этого пути не остается ни одного контура, поэтому минор пути Равен единице
Таким образом, передаточная функция графа между вершинами f и у в соответствии с формулой (2.45) равна:
Если в эту формулу подставить дробно-рациональные выражения для передаточных функций (2.28), то получим:
Знаменатель этого выражения A ( s ) представляет собой характеристический полином (ХП) системы. ХП системы, в которой разомкнуты все контуры, равен произведению ХП (знаменателей передаточных функций) всех дуг
Можно показать, что определитель графа равен отношению ХП A ( s ) и A0(s) соответственно исходной системы и системы, в которой все контуры разомкнуты:
Очевидно, для бесконтурного графа имеет место: A ( s )= A 0 ( s ) и Δ(s)=A 0 ( s )/ A 0 ( s )=1
Типовые звенья Как показано выше, любую систему можно представить в виде соединения типовых динамических звеньев. Число таких звеньев невелико и определяется типом нулей и полюсов. Как следует из представления модели в форме пространства состояний, для реализации любой физически осуществимой передаточной функции достаточно двух типов звеньев: интеграторов и усилителей. Если степень числителя передаточной функции т превышает степень знаменателя п, то необходимо звено дифференцирующего типа. В теории управления состав типовых звеньев несколько расширен исходя из соображения удобства — необходимы звенья, моделирующие часто встречающиеся случаи, а также позволяющие представление передаточных функций общего вида последовательным и параллельным соединением типовых звеньев. Исходя из этого дополнительно рассматривают типовые звенья со следующими передаточными функциями:
— апериодическое звено первого порядка ( k — коэффициент усиления; Т— постоянная времени);
— пропорционально-дифференцирующее звено;
— звенья второго порядка (£— коэффициент демпфирования). При
ЛИТЕРАТУРА
1. Афанасьев В. Н., Колмановский В. Б. Математическая теория конструирования систем.— М.: Машиностроение, 2013. 2. Кузовков Н. Т. Динамика систем автоматического управления.— М.: Машиностроение, 2015. 3. Первозванский А. А. Курс теории автоматического управления. — М.: Наука, 2016. 4. Попов Е. П. Прикладная теория процессов управления в нелинейных системах.— М.: Наука, 2013. 5. Пупков К. А., Капалин В. И., Ющенко А. С. Функциональные ряды в теории нелинейных систем.— М.: Наука, 2016. 6. Уонэм М. Линейные многомерные системы управления.— М.: Наука, 2012. 7. Хлыпало Е. И. Нелинейные системы автоматического регулирования.— М.: Энергия, 2015. 8. Хофер Э., Лундерштедт Р. Численные методы оптимизации.— М.: Машиностроение, 2013. 9. Черноусько Ф. Л. Оценивание фазового состояния динамических систем.— М.: Наука, 2013. 10. Demuth H., Beale M. Neural Network Toolbox for Use with MATLAB.— The MathWorks, Inc., Natick, MA, 2014. 11. Demuth D., Hellendoom H, Reinfrank M. Introduction to Fuzzy Control.— Berlin, Heidelberg: Springer Verlag, 2013. 12. Gulley N., Jang R.J.-S. Fuzzy Logic Toolbox for Use with MATLAB — The MathWorks, Inc., Natick, MA, 2015. 13. Silver E.A., Peterson R. Decision Systems for Inventory Management and Production Planning.— John Wiley&Sons, Inc., 2015.
А.В. Меркулов
АСУ И МЕХАТРОНИКА Автомобилей и тракторов Конспекты лекций Специальность 23.05.01
Москва - 2017 ВВЕДЕНИЕ Окружающий нас мир представляет собой совокупность взаимосвязанных социальных, экономических, технических, биологических и иных систем, процесс функционирования каждой из которых включает получение информации и ее анализ, принятие решений и их исполнение, т. е. выполнение основных операций любого процесса управления. В наиболее общей трактовке это — организация целенаправленного взаимодействия энергии, вещества и информации. Приоритетной и конечной целью использования Информации является управление, т.е. выработка и реализация управляющих действий. Универсальность принципов управления позволяет применять их к объектам любой природы, в том числе к самим процессам получения, передачи и обработки информации. Таким образом, и сами процессы управления могут рассматриваться как объекты управления систем более высоких уровней иерархии. Дисциплина «АСУ и мехатроника А и Т» формирует у будущих инженеров и исследователей системное мышление и целостное видение явлений мира техники, природы, социальной среды, синтезирует знания студентов по математике, физике, другим естественным наукам, дает наглядные примеры их конструктивного применения. В последние годы практика проектирования и реализации алгоритмов управления претерпела значительные изменения, обусловленные интенсификацией производственных технологий, актуализацией проблем экологии, революционными достижениями в области получения, передачи и обработки информации. Применение непрерывно развивающихся компьютерных программ моделирования и имитации, анализа и синтеза систем управления в большинстве случаев устраняет вычислительные проблемы, связанные с исследованиями и разработками таких систем. Вместе с тем накопленный опыт позволяет утверждать, что расширение области применения теории управления, т.е. круга решаемых на ее основе задач, внедрение новых технологий исследования и проектирования систем управления относительно мало отразились на основах названной учебной дисциплины. По основам теории автоматического управления в нашей стране издан целый ряд учебников и учебных пособий. Однако они написаны относительно давно, и сохранившихся экземпляров в настоящее время недостаточно для обеспечения учебного процесса в технических вузах. Это связано с тем, что дисциплины «Теория автоматического управления» и «Теория управления» входят в состав федеральной компоненты Государственного образовательного стандарта многих специальностей и направлений высшего профессионального образования. Традиционное изложение основ теории управления обычно требует большого объема учебника, поскольку значительное место здесь уделяется вспомогательному материалу: математическим основам, способам, приемам и методикам упрощения вычислений, подробному описанию свойств типовых динамических звеньев и т. п. Изложение тех же основ в ряде книг по «современной» теории управления базируется на абстрактном, преимущественно формально-алгебраическом подходе, трудном для восприятия студентами при изучении фундаментальных свойств и раскрытии «механизмов» управления. В ряде учебников по основам теории автоматического управления материал систематизируется не по задачам теории управления, а по формам представления математических моделей (передаточные функции, структурные схемы или системы дифференциальных уравнений в матричной форме пространства состояний) и по методам расчета (частотные, графо-аналитические или временные, аналитические), что отражает не столько суть, сколько — этапы развития дисциплины. Характерной чертой структурных моделей, используемых в теории управления, отличающих их от динамических (поведенческих) моделей, рассматриваемых в других учебных дисциплинах, является причинно-следственный характер взаимодействий элементов систем, что отражает информационно-алгоритмический подход, принятый в теории управления. Часть 1. ОСНОВНЫЕ ПОНЯТИЯ ТЕОРИИ УПРАВЛЕНИЯ
ПОНЯТИЯ ОБ УПРАВЛЕНИИ И СИСТЕМАХ УПРАВЛЕНИЯ
Под управлением понимается совокупность операций по организации некоторого процесса для достижения определенных целей. Рассмотрим пример процесса (рис. 1.1). Целью управления является поддержание курса движущегося объекта
Анализируя пример управления, можно выделить следующие операции: 1 — получение информации о цели (заданном курсе); 2 — получение информации о состоянии процесса и среды; 3 — выявление соответствия текущего состояния процесса цели управления и принятие решения об оказании управляющего воздействия на объект (можно предположить, что полученная информация обрабатывается по некоторому алгоритму); 4 — исполнение принятого решения. Первые две операции отражают информационный, третья — алгоритмический, а четвертая — энергетический аспекты управления. Если все операции управления осуществляются человеком, то это ручное управление. Судно крупного тоннажа обычно снабжено приводом руля (рулевой машиной), т. е. человек освобожден от физических усилий. В подобных случаях говорят о механизированном управлении. Для этого необходимы исполнительный механизм и источник энергии. Автоматическое управление осуществляется без непосредственного участия человека. При этом не только энергетические, но также информационные и алгоритмические операции управления передаются автоматам. Операции автоматического управления реализуются в следующих основных функциональных элементах: объекте управления, измерительных элементах, управляющем устройстве и исполнительном механизме. Совокупность взаимосвязанных и взаимодействующих элементов образует систему управления, если она способна к достижению цели. Системы управления представляют собой класс динамических систем, отличающихся наличием цели и специальной организации, позволяющей достичь эту цель. Подобные системы функционируют в живой и неживой природе, в самых различных областях техники, экономики, биологии. Однако, независимо от области функционирования, их объединяет в особый класс ряд системных свойств и признаков. На рис. 1.2 условно изображена система управления (СУ) курсом. Объектом управления является движущийся объект; измерительным элементом — гироскопический компас (ГК), ось которого направлена вдоль заданного курса; управляющим устройством — авторулевой; исполнительным механизмом — привод руля. Линии со стрелками указывают направление причинно-следственных связей элементов. Предполагается, что элементы СУ обладают свойством однонаправленности. Например, изменение курса судна приводит к изменению сигнала на выходе гироскопического компаса, но изменение этого сигнала, очевидно, не может изменить курс. Изменение положения руля приводит к изменению курса движущегося судна, но изменение курса не может изменять положение руля. Свойство однонаправленности элементов, а также причинно-следственный характер их взаимодействия являются принципиальной особенностью подхода, принятого в теории управления.
Рис. 1.2. Система управления курсом.
Схема автоматической системы управления (см. рис. 1.2) является первым уровнем абстракции, необходимой для последующего теоретического анализа. На схеме выделены и упрощенно изображены конкретные элементы системы — объект, привод руля, гирокомпас и др. Теория управления изучает закономерности управления, присущие объектам любой природы, поэтому имеет дело с более абстрактными описаниями.
Рис. 1.3. Структура системы управления с обратной связью
Следующий уровень абстракции иллюстрирует рис. 1.3, где приведена структура системы с указанием функций элементов: объект управления (ОУ); управляющий орган (УО), обычно конструктивно входящий в объект; исполнительный механизм (ИМ); управляющее устройство (УУ); измерительный элемент (ИЭ). Там же даны и обозначения для основных переменных систем управления: у — управляемая переменная (выход объекта и системы); ОБЪЕКТЫ УПРАВЛЕНИЯ
Объект управления (иначе, управляемый объект) реализует процесс, который необходимо организовать для достижения поставленных целей. В теории управления объект рассматривается как преобразователь переменных входа u ( t ), f ( t ) в переменную выхода, как это показаноно рис. 1.4. Цель управления, в первую очередь, определяет ограничения на переменную выхода объекта. Неконтролируемые воздействия среды называемые возмущениями, вызывают нежелательные отклонения выхода объекта. Для уменьшения влияния наобъект управления этих отклонений на объект оказывают соответствующие управляющие воздействия и( t ).
Рис. 1.4. Абстрактный объект управления
Если переменные входа и выхода объекта являются векторами, то объект называют многомерным. Например, задача управления подводной лодкой или самолетом (воздушным судном) связана с рассмотрением в качестве управляемых переменных не только курсового угла Теория управления изучает общие закономерности, присущие системам управления независимо от их природы. Объекты управления могут быть техническими, экономическими, биологическими, социальными, военными и др.
Технические объекты
Примерами технических объектов являются движущиеся объекты (суда, самолеты, автомобили), объекты энергетики (печи, теплообменники, парогенераторы, электрические генераторы, двигатели и другие преобразователи энергии), объекты химической промышленности (реакторы, автоклавы, мешалки и другие аппараты), объекты машиностроения и металлургии (станки и обрабатывающие центры, прокатные станы), бытовая техника (утюги, холодильники, кондиционеры, устройства бытовой электроники) и т. д. Управляемыми переменными для технических объектов являются физико-химические переменные, характеризующие их состояние или поведение (механические координаты, температура, электрическое напряжение, давление, концентрация компонентов в смесях и т. д.). Теория автоматического управления долгое время развивалась применительно именно к техническим системам, объекты которых наиболее изучены — во многих случаях для них имеются достаточно адекватные математические модели или возможность их аналитического построения.
Экономические объекты
Экономическими объектами являются: цех, завод, отрасль, предприятия торговли и сферы услуг, банки, страховые компании и т. п. Общим для них является то, что в качестве одной из обобщенных управляемых переменных рассматривается прибыль. Приведем простейшие примеры таких объектов и соответствующих задач (целей) управления.
Пример 1. Задача определения оптимального объема заказа. Фирма потребляет некоторую продукцию в одном и том же объеме М единиц в неделю и должна регулярно возобновлять заказы для пополнения запасов. Каждый очередной заказ независимо от его объема сопряжен с некоторыми накладными расходами К по размещению заказа и его реализации. С другой стороны, с хранением приобретаемой продукции связаны расходы на складирование, страхование и содержание складских помещений. Допустим, что за хранение единицы потребляемой продукции в течение недели взимается плата в размере h . Обозначим через Q объем заказа. Управляемой переменной в таком объекте является среднее значение суммарных затрат в расчете на одну неделю СЗ. Накладные расходы К и расходы на хранение h принимаются за возмущения. Целью управления является минимизация значения управляемой переменной.
Пример 2. Динамическая задача управления запасами. Пусть необходимо разработать календарную программу выпуска некоторого изделия на плановый период, состоящий из N. отрезков. Предполагается, что для каждого из этих отрезков имеется точный прогноз спроса на выпускаемую продукцию, причем для разных отрезков спрос неодинаков. На экономические показатели производства влияют объемы изготовляемых партий, поэтому фирме нередко бывает выгодно выпустить на каком-то отрезке времени продукцию в объеме, превышающем спрос в пределах этого отрезка, и хранить излишки, используя их для удовлетворения последующего спроса. Задачей управления является реализация такой программы выпуска, при которой общая сумма затрат на производство и содержание запасов минимизируется при условии полного и своевременного удовлетворения спроса на продукцию. Здесь оптимальное управление ищется в виде функции дискретного времени.
Пример 3. Задача планирования производства. Фирма выпускает два типа тяжелого оборудования — землеройные машины (Е) и машины для лесоразработок ( F ). Прогнозирование спроса показало, что можно продать столько машин типа Е и F , сколько фирма может произвести. Фирма получает прибыль $5000 от продажи каждой машины типа Е и $4000 — машины типа F . Оборудование производится в двух филиалах фирмы А и В, каждый из которых располагает бюджетом времени в 100 ч. Производство одной машины Е требует 10 ч в филиале А и 20 ч — в филиале В. Производство одной машины требует 16 ч в филиале А, 10 ч — в филиале В. Для сохранения позиций фирмы на рынке необходимо производить не менее одной машины F на каждые три машины Е. Основной потребитель заказал в сумме не менее 5 машин в любой комбинации. Объект управления в данном примере имеет два управляющих воздействия — объемы выпуска машин типа Е и типа F . Управляемая переменная — прибыль Р должна быть максимальной при удовлетворении ограничений. Это цель управления. Разнообразные по характеру своей деятельности организации производственной и непроизводственной сфер, представляют собой сложные объекты, экономическая эффективность функционирования которых существенно зависит от качества организационного управления. Научной дисциплиной, занимающейся решением задач такого управления, является исследование операций. Методами исследования операций решаются задачи управления деятельностью той или иной организации, в частности, задачи календарного планирования производства и управления запасами, задачи комплектования штатов и др. Сюда же относится определение ассортимента выпускаемой продукции, разработка долгосрочных программ расширения производства, проектирования сети складских помещений в системе оптовой торговли и т.д. Управление экономическими объектами является задачей, вообще говоря, более сложной, чем управление техническими объектами. Одна из причин заключается в том, что в современной экономике производственно-технические, конъюнктурно-коммерческие и прочие факторы находятся в сложной взаимной зависимости, а внешние экономические факторы содержат элементы неопределенности. Принятие управленческих решений, которые были бы одновременно и реальными, и экономически выгодными, является достаточно сложной задачей.
Биологические системы Живые системы — от простейших клеток до сложных организмов — поддерживают свою жизнедеятельность благодаря действию в них механизма управления. Процессы управления в живом организме регулируют ритм сердца и дыхания, температуру тела и т. д. В живой природе механизмы управления настолько органично встроены в объекты, что не всегда можно выделить такие функциональные элементы, присущие техническим системам, как объект управления, измерительные элементы, управляющие устройства и исполнительные механизмы. Однако и здесь методы теории управления помогают исследователю глубже понять процессы. Для демографов, экологов, эпидемиологов, микробиологов и других специалистов большой практический интерес представляют модели управления, объясняющие механизмы изменения численности биологических популяций (саморегуляция). Такие модели могут оказаться полезными и для принятия решений в области биологического управления, например, обосновать целесообразность использования при борьбе с насекомыми-вредителями ядохимикатов или безопасных мер биологического характера (в частности, естественных врагов этих вредителей).
|
Последнее изменение этой страницы: 2019-03-22; Просмотров: 578; Нарушение авторского права страницы

 , но также углов крена и тангажа.
, но также углов крена и тангажа.














 (2.1)
(2.1)











 ) дает возможность определить амплитуду R(
) дает возможность определить амплитуду R(  ) и фазу
) и фазу  (
( 
 )=modW(j
)=modW(j  (
(  ) — амплитудная и фазовая частотные характеристики, а Р(
) — амплитудная и фазовая частотные характеристики, а Р(  )=ReW(j
)=ReW(j 


 , минимально-фазовой передаточной функции W(j
, минимально-фазовой передаточной функции W(j  (
(  ) по крутизне ЛАЧХ L(
) по крутизне ЛАЧХ L(  ):
):

 ) мало отличается от асимптоты, т. е. нет резких изменений наклона, то
) мало отличается от асимптоты, т. е. нет резких изменений наклона, то 







































 > 1 имеем апериодическое звено второго порядка; при 0 <
> 1 имеем апериодическое звено второго порядка; при 0 <  равным заданному
равным заданному  . Говорят, что ТС является объектом управления (ОУ). Возмущающие воздействия — ветер, неконсервативные возмущения — приводят к отклонению курса от заданного. Для ослабления влияния возмущений и ликвидации отклонения используется управляющий орган — руль. Изменение положения руля
. Говорят, что ТС является объектом управления (ОУ). Возмущающие воздействия — ветер, неконсервативные возмущения — приводят к отклонению курса от заданного. Для ослабления влияния возмущений и ликвидации отклонения используется управляющий орган — руль. Изменение положения руля  является управляющим воздействием — завершающей операцией по организации процесса судовождения для достижения заданного курса.
является управляющим воздействием — завершающей операцией по организации процесса судовождения для достижения заданного курса.


 —управляющее воздействие (энергетическое); и — управляющее воздействие (информационное); е -отклонение управляемой переменной от заданного значения g или ошибка системы;f— возмущающее воздействие среды. Схема на рис. 1.3 является достаточно общей и отражает существенные с позиций теории управления черты систем управления с обратной связью.
—управляющее воздействие (энергетическое); и — управляющее воздействие (информационное); е -отклонение управляемой переменной от заданного значения g или ошибка системы;f— возмущающее воздействие среды. Схема на рис. 1.3 является достаточно общей и отражает существенные с позиций теории управления черты систем управления с обратной связью.