
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Глава 8. Рычаг. Сцепление и трение скольженияСтр 1 из 10Следующая ⇒
Глава 8. Рычаг. Сцепление и трение скольжения
Рычаг. Устойчивость при опрокидывании. Коэффициент устойчивости Рычагом называется твердое тело, имеющее неподвижную ось вращения и находящееся под действием сил, лежащих в плоскости, перпендикулярной этой оси. Положим, что к рычагу в точках
Рис. 1.79 Уравнение моментов задаваемых сил относительно опорной точки, не содержащее реакции оси рычага, выражает условие, которому удовлетворяют задаваемые силы, приложенные к рычагу, если он находится в покое. Это условие формулируется так: если рычаг находится в покое, то алгебраическая сумма моментов всех задаваемых сил, приложенных к рычагу, относительно опорной точки равна нулю
Из этого условия, которое выполняется, если рычаг находится в покое, получим условие устойчивости тел при опрокидывании. Пусть к прямоугольному параллелепипеду (рис. 1.80) весом
Рис. 1.80
Назовем абсолютные значения моментов сил
Рис. 1.87
Для равновесия системы сходящихся сил, приложенных к твердому телу, необходимо и достаточно, чтобы равнодействующая системы сил равнялась нулю.
Уравнения равновесия.
2. Барабан. Объектом равновесия является барабан. Активная сила – сила тяжести Для равновесия плоской произвольной системы сил необходимой достаточно, чтобы главный вектор этой системы сил и её главный момент относительно любого центра были равны нулю.
Рис. 1.88
Уравнения равновесия.
Сила сцепления
Решая систему уравнений (а – в), получим:
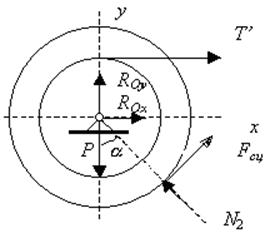
3. Тормозное устройство. Объект равновесия — шток тормозного устройства. Активная сила
Рис. 1.89
Покажем силу сцепления Условия равновесия:
Уравнения равновесия:
Определение искомых величин, проверка правильности решения и анализ полученных результатов. Решая уравнения (г – е), получаем:
Подставляя числовые значения, получим:
Знак минус указывает на то, что реакция RB направлена в противоположную сторону.
Трение качения Трением качения называется сопротивление, возникающее при качении одного тела по поверхности другого. Между катком и плоскостью, на которой он покоится, возникают силы трения, если приложить к оси катка силу
а) б)
Рис. 1.90
Из опыта известно, что при изменении величины силы Таким образом, в предельном положении равновесия катка к нему будут приложены две взаимно уравновешивающиеся пары: одна пара сил (
где Для того, чтобы имело место чистое качение (без скольжения), необходимо, чтобы сила трения
где f — коэффициент трения скольжения. Задача 1.15. Цилиндрический каток диаметра 60 см и весом Q=3, 92кН приводится в равномерное движение человеком, который давит на рукоятку АО = 1, 5 м с постоянной силой Решение. При равномерном качении катка все силы, действующие на каток, уравновешиваются. К катку приложены две активные силы: вес катка Рассмотрим равновесие катка как твердого тела, находящегося под действием четырех сил:
Рис. 1.91
В уравнении (в) буквой r обозначен радиус катка. При составлении суммы моментов сил относительно точки С сила Из уравнения (в) найдем величину искомой силы Равенство (б) даст Из уравнения (а) определяем величину силы трения:
Проверим, сопоставляя величины силы трения при качении
Таким образом, сила трения скольжения больше силы трения при качении и каток будет катиться без скольжения.
Главный момент системы сил
Его проекции
Модуль и направление главного момента определяются по формулам:
Момент каждой силы можно вычислить непосредственно или по формулам:
Аналогично главные моменты
Глава 10. Центр тяжести
Центр параллельных сил
Допустим, что к твердому телу в точках
Рис. 1.98
Складываем силы
Определив модуль равнодействующей силы
Аналогично определяем равнодействующую сил
В результате последовательного сложения заданных параллельных сил получаем две противоположно направленные параллельные силы 1. Силы Точка С, в которой приложена равнодействующая сила
Точка С называется центром параллельных сил. Через эту точку обязательно проходит линия действия равнодействующей заданной системы параллельных сил, если, не изменяя модулей сил, поворачивать линии действия сил вокруг точек их приложения на один и тот же угол в одну и ту же сторону. Действительно, все приведенные равенства, определяющие модули и точки приложения равнодействующих сил 2. Силы 2. Силы Система параллельных сил, направленных в одну сторону, не может уравновешиваться или приводиться к паре сил. Эта система всегда имеет равнодействующую.
Параллельных сил
Рассмотрим систему параллельных сил
Рис. 1.99
Положение центра параллельных сил С определится его радиусом-вектором
Спроецировав векторы левой и правой частей этого равенства на оси координат, получим формулы для вычисления координат центра параллельных сил:
В данных формулах числителем и знаменателем каждой дроби является алгебраическая сумма. Координаты точки приложения каждой силы имеют тот или другой знак, и параллельные силы, направленные в одну сторону, считаются положительными, а направленные противоположно –отрицательными. Таким образом, координаты Выбор направления, вдоль которого параллельные силы считаются положительными, произволен и на результатах вычисления координат по формулам не отражается.
Центр тяжести твердого тела
Обозначим силы притяжения отдельных элементарных частиц тела к Земле
Рис. 1.100 Для центра тяжести формулы примут вид
где суммирования распространены на все частицы твердого тела. В этих формулах алгебраическими величинами являются только координаты точек, а значения Определим положение центра тяжести однородного тела. Вес однородного тела определяется формулой
Центр тяжести однородного тела, заполняющего некоторый объем, называется центром тяжести этого объема.
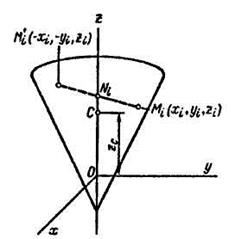
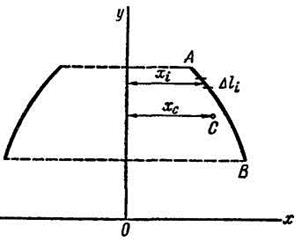
Положения центра тяжести Теорема 1. Если однородное тело имеет ось симметрии, то центр тяжести тела находится на этой оси (рис. 1.102). Применяя эту теорему к плоской фигуре или линии, легко установить, что если плоская фигура или линия имеет ось симметрии, то ее центр тяжести лежит на этой оси.
Рис. 1.102 Рис. 1.103
Теорема 2. Если однородное тело имеет плоскость симметрии, то его центр тяжести находится в этой плоскости (рис. 1.103). На основе рассмотренных теорем можно определить положения центров тяжести некоторых симметричных линий, фигур и тел: 1) центр тяжести отрезка прямой лежит в его середине; 2) центры тяжести окружности, площади круга, поверхности и объема шара находятся в их геометрических центрах; 3) центры тяжести периметра и площади параллелограмма, ромба, прямоугольника и квадрата лежат в точках пересечения их диагоналей; 4) центр тяжести периметра и площади правильного многоугольника находится в центре вписанного (или описанного) круга. Теорема 3. Объем тела вращения, полученного вращением плоской фигуры вокруг оси, лежащей в плоскости фигуры, но не пересекающей ее, равен произведению площади фигуры на длину окружности, описанной ее центром тяжести (рис. 1.104).
где Теорема 4. Площадь поверхности вращения, полученной вращением плоской кривой вокруг оси, лежащей в плоскости этой кривой, но не пересекающей ее, равна произведению длины этой кривой на длину окружности, описанной ее центром тяжести (рис. 1.105).
где
Рис. 1.104 Рис. 1.105
Расчетные данные
Суммированием определяем площадь и статические моменты всей заданной фигуры. Площадь заданной фигуры F=100 см2. Ее статические моменты:
Координаты центра тяжести пластинки:
По вычисленным координатам строим центр тяжести плаcтинки С.
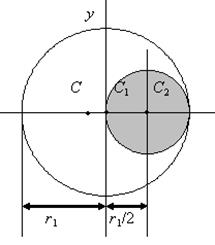
Задача 1.18. Определить положение центра тяжести С однородного диска радиусом Решение. Решаем задачу по способу отрицательных площадей. Принимаем за ось x ось симметрии рассматриваемой плоской фигуры. Центр тяжести фигуры находится на этой оси, т.е.
Рис. 1.109
Здесь Тогда
Строим центр тяжести
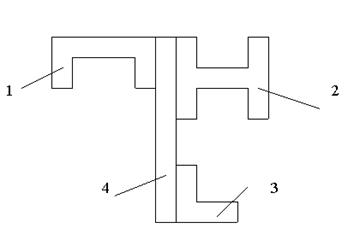
Задача 1.19. Определить положение центра тяжести сечения, составленного из профилей стандартного проекта (рис. 1.110).
Рис. 1.110
Сечение составлено из швеллера № 20 (1), двутавра № 20 (2), равнобокого уголка № 18 (3) и стальной однородной полосы размером 420 ´ 20 (4). При решении подобных задач нужно пользоваться сортаментом прокатной стали: двутавры стальные горячекатаные – ГОСТ 8240-89, уголки стальные горячекатаные равнополочные – ГОСТ 8509-93. Эти таблицы для каждого профиля содержат размеры и площадь, а для уголков и швеллеров, кроме того координаты центров тяжести. Решение. Задачу будем решать, используя метод составных площадей, для чего разобьем сечение на составляющие элементы. На расчетной схеме необходимо показать: - основные размеры составляющих площадей; - центры тяжести составляющих площадей обозначим Для швеллера и уголка положение центров тяжести указано в сортаменте, двутавр является симметричной фигурой, поэтому центр тяжести лежит на пересечении осей симметрии, у однородной пластины центр тяжести находится на пересечении диагоналей; - систему отсчета (рис. 1.111 оси координат изображаются так, чтобы горизонтальная ось совпадала с нижним краем сечения, а вертикальная ось – с правым).
Рис. 1.111
При решении задачи будем использовать таблицу 1.3, которая содержит: элементы сечения (графа 1); координаты центров тяжести составляющих площадей (графы 2 и 3); площади сечений (графа 4); статические моменты площади сечения относительно оси y (графа 5) и статические моменты площади сечения относительно оси х (графа 6). Для определения координат центров тяжести каждого элемента сечения необходимо опустить перпендикуляры из точек Швеллер имеет ось симметрии, поэтому в сортаменте указывается одна координата центра тяжести этой фигуры (
Координату
Таблица 1.3 Раздел II. Кинематика Кинематикой называется раздел механики, в котором изучается движение материальных тел в пространстве с геометрической точки зрения, вне связи с силами, определяющими это движение. Слово «кинематика» происходит от греческого слова «кинема», что значит движение. Движение, рассматриваемое в самом общем смысле слова, т. е. понимаемое как форма бытия материи, как внутренне присущий материи атрибут, охватывает собою все происходящие во вселенной изменения и процессы, начиная от простого перемещения и кончая мышлением. Материя без движения так же немыслима, как движение без материи. В мире нет ничего кроме движущейся материи, и движущаяся материя не может двигаться иначе, как в пространстве и во времени. Таким образом, всякое движение происходит в пространстве и во времени, т. е. пространство и время представляют собой формы существования материи. Они так же объективно реальны, как и материя. Движение и материя существуют вечно и не могут быть ни созданы, ни уничтожены. В теоретической механике изучается простейшая форма движения материи — механическое движение, т. е. происходящее во времени изменение положения одного тела относительно другого, с которым связана система координат, называемая системой отсчета. Систему отсчета можно связать с любым телом. Эта система может быть как движущейся, так и условно неподвижной. При изучении движения на Земле за условно неподвижную систему отсчета обычно принимают систему осей, неизменно связанных с Землей. Тело, положение которого по отношению к выбранной системе отсчета не изменяется, находится в состоянии относительного покоя (по отношению к этой системе). Пространство в механике рассматривается как трехмерное евклидово пространство, и все измерения в нем производятся на основания методов евклидовой геометрии. За единицу длины при измерении расстояний принимается метр. Время в классической механике предполагается универсальным, т. е. одинаковым во всех системах отсчета и не зависящим от движения одной системы относительно другой. Оно рассматривается как непрерывно изменяющаяся величина. За единицу времени принимается одна секунда, равная 1/(24∙ 3600) средних солнечных суток. Все кинематические величины, характеризующие движение твердого тела и движение отдельной его точки (расстояния, скорости, ускорения), рассматриваются как функции времени. Хотя евклидово пространство и универсальное время отражают реальные свойства пространства и времени лишь приближенно, тем не менее они позволяют с достаточной для практики точностью изучать движения, скорости которых далеки от скорости света. Все кинематические характеристики движения твердого тела или отдельных его точек одинаковы для «материальных» и «геометрических» точек, поэтому ниже употребляется термин «точка» без пояснения «материальная» она или «геометрическая». Скорости точки
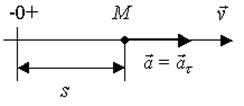
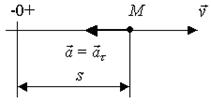
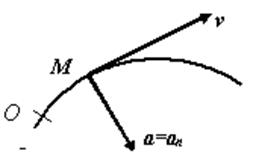
Естественный способ задания движения точки применяется в случае, когда траектория точки заранее известна (движение транспортных средств по рельсовому пути, автомобильным дорогам). Линия, представляющая собой геометрическое место последовательных положений движущейся точки в рассматриваемой системе отсчета, называется траекторией (рис. 2.1). Траектория движения транспортных средств – дороги – характеризуются допустимой кривизной и наибольшим уклоном. Для железных дорог рекомендуются радиусы кривизны 400–4000 м, допустимые радиусы кривизны в трудных условиях 300–2000 м, наибольший уклон профиля 1, 5–2, 5 градуса. Для автомобильных дорог наименьший радиус кривизны может находится в пределах 250 – 260 м, а наибольший уклон – 4–5 градусов.
 
Рис. 2.1
Положение движущейся точки М на траектории определяется дуговой координатой, т. е. расстоянием ОМ = s. При движении точки М расстояние s от этой точки до неподвижной точки О изменяется с течением времени, т. е. дуговая координата s является функцией времени:
Эта функция однозначна (точка в каждое мгновение занимает на траектории только одно положение), непрерывна (точка не может перейти из одного положения в другое, минуя промежуточное), дважды дифференцируема и называется уравнением движения. Таким образом, движение точки определено, если известны следующие элементы: траектория точки, начало и направление отсчета дуговой координаты и уравнение движения Одной из основных кинематических характеристик движения точки является скорость. Скорость – это векторная величина, характеризующая быстроту и направление движения точки в данной системе отсчета. Размерность скорости Модуль скорости равен абсолютному значению производной от дуговой координаты точки по времени.
Производная
1.2. Векторный способ задания движения, определение скорости Точки
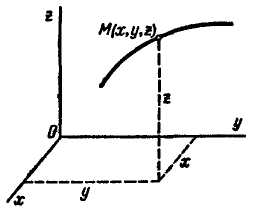
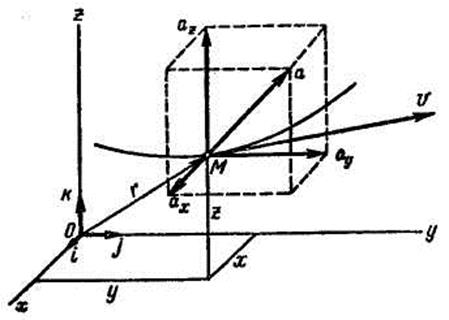
Положение точки в пространстве однозначно определяется заданием радиуса-вектора, проведенного из некоторого неподвижного центра О в данную точку М (рис. 2.2). Для определения движения точки должна быть задана вектор-функция аргумента t
При векторном способе задания движения положение движущейся точки в каждый момент времени (рис. 2.3) определяется радиусом-вектором. Вектор скорости точки в данный момент равен производной от радиуса-вектора точки по времени.
Рис. 2.2 Рис. 2.3
Вектор скорости точки направлен по касательной к траектории в сторону движения точки. При движении точки по криволинейной траектории направление вектора скорости непрерывно изменяется (рис. 2.4).
Рис. 2.4
1.3. Координатный способ задания движения точки, определение Скорости точки Положение точки М в системе отсчета Оху z определяется тремя декартовыми координатами точки х, у, z (рис. 2.5). При движении точки М ее координаты изменяются с течением времени. Следовательно, координаты х, у, z движущейся точки М являются функциями времени t:
Эти уравнения называются уравнениями движения точки в декартовых координатах.
Рис. 2.5
Движение точки М в одной плоскости определяется двумя уравнениями движения (рис. 2.6, а):
а) б)
Рис. 2.6
Прямолинейное движение точки М определяется одним уравнением движения (рис. 2.6, б)
Уравнения движения, определяющие координаты точки в любой момент времени, можно рассматривать как параметрические уравнения траектории точки, а время – как независимый переменный параметр. При исключении параметра t из уравнений движения получаются уравнения траектории точки в координатной форме. Пусть уравнения движения точки М имеют вид
Решив первое уравнение относительно t, получим Подставив полученное для t выражение в два других уравнения, найдем уравнения траектории точки в координатной форме:
Два уравнения с тремя координатами определяют линию в пространстве, т.е. траекторию точки. Пусть движение точки М в плоскости задано уравнениями
Исключив параметр t, получим уравнение траектории точки в координатной форме:
Помимо декартовых координат для определения положения точки на плоскости и в пространстве применяют и другие системы координат (полярные, цилиндрические, сферические и др.). Определим модуль и направление скорости точки по уравнениям ее движения в декартовых координатах (рис. 2.7).
Рис. 2.7
Проекции скорости точки на неподвижные оси декартовых координат равны первым производным от соответствующих координат точки по времени. Вычислив проекции скорости на оси декартовых координат, можно определить модуль и направление скорости точки по следующим формулам:
Движение точки в плоскости хОу задается двумя уравнениями движения. Модуль и направление скорости точки в этом случае определяются так:
Прямолинейное движение точки задается одним уравнением. В этом случае модуль скорости точки равен абсолютной величине проекции скорости на ось х:
При
Задача 2.1. Кривошип ON длиною а вращается вокруг оси, перпендикулярной к плоскости рисунка и проходящей через точку О. Угол φ между неподвижной осью Ох и кривошипом изменяется пропорционально времени: φ = kt. Составить уравнения движения точки N в декартовой системе координат. Найти уравнения ее траектории (рис. 2.8). Решение. Для составления уравнений движения точки N надо выразить ее координаты как функции времени. Из рисунка находим координаты x, y точки N:
Рис. 2.8
Это и будут искомые уравнения движения точки N. Чтобы найти уравнение траектории точки в явной форме, надо исключить из уравнений движения время. Для этого возведем каждое уравнение движения (2.1 и 2.2) в квадрат
и сложим уравнения (2.3) и (2.4):
Это уравнение траектории точки N - уравнение окружности радиусом а с центром в начале координат. Векторным способом Ускорение точки характеризует быстроту изменения модуля и направления скорости точки (рис. 2.9). Размерность ускорения В ектор ускорения точки равен первой производной от скорости или второй производной от радиуса-вектора точки по времени.
Рис. 2.9
Вектор ускорения точки Естественным способом
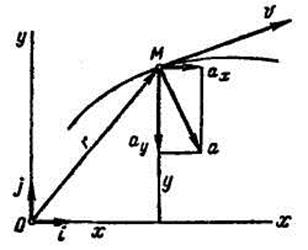
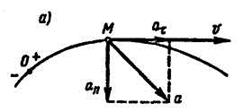
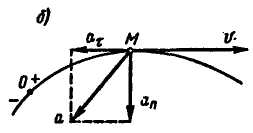
Ускорение точки равно геометрической сумме двух векторов, один из которых направлен по главной нормали и называется нормальным ускорением, а другой направлен по касательной и называется касательным ускорением точки (рис. 2.13)
Касательное ускорение характеризует изменение скорости по модулю, а нормальное – изменение скорости по направлению. Проекция ускорения точки на бинормаль равна нулю, так как вектор ускорения расположен в соприкасающейся плоскости. Проекция ускорения на главную нормаль равна
т. е. проекция ускорения точки на главную нормаль равна квадрату модуля скорости точки, деленному на радиус кривизны траектории в соответствующей точке. Эта проекция всегда положительна. Из этого следует, что нормальное ускорение точки всегда направлено к центру кривизны траектории и равно по модулю этой проекции.
Рис. 2.13
Проекция ускорения на касательную равна
т.е. проекция ускорения точки на касательную равна второй производной от дуговой координаты точки по времени или первой производной от алгебраической величины скорости точки по времени. Если известны траектория точки, ее радиус кривизны ρ в любой точке и уравнение движения s=f(t), то можно найти проекции ускорения точки на естественные оси и по ним определить модуль и направление ускорения точки:
где
Способом
Определим модуль и направление ускорения точки по уравнениям ее движения в декартовых координатах. Пусть заданы уравнения движения точки (рис. 2.14)
Рис. 2.14
Проекции ускорения на оси координат определяются по формулам:
Так как первые производные от координат точки по времени равны проекциям скорости на соответствующие оси, т.е.
то проекции ускорения точки можно представить в другом виде:
Следовательно, проекции ускорения точки на неподвижные оси декартовых координат равны вторым производным от соответствующих координат точки по времени или первым производным по времени от проекций скорости на соответствующие оси. После вычисления проекций ускорения на координатные оси можно определить модуль и направление ускорения точки:
Движение точки в плоскости хОу задается двумя уравнениями движения:
Рис. 2.15
Модуль и направление ускорения точки в этом случае (рис. 2.15) определяются так:
Прямолинейное движение точки задается одним уравнением x = f(t). В этом случае модуль ускорения равен абсолютному значению его проекции на ось х, т. е.
Ускорение направлено в сторону оси х, если
Ее движения
Равномерное движение. Выясним зависимость характера движения точки от значений ее нормального и касательного ускорений. С л у ч а й I: С л у ч а й II:
Рис. 2.16
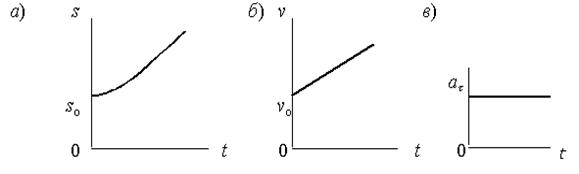
Если Уравнение равномерного движения точки имеет вид
Постоянную скорость равномерного движения точки можно определить из уравнения движения
Графики равномерного движения и его скорости представлены на рис. 2.17.
Рис. 2.17
Равнопеременное движение. При равнопеременном движении алгебраическое значение касательного ускорения остается во все время движения неизменным С л у ч а й III:
а) Ускоренное движение б) Замедленное движение
Рис. 2.18 С л у ч а й IV:
Рис. 2.19
Графическое изображение ускорения точки при равнопеременном криволинейном движении представлено на рисунке 2.19, а ускоренного движения, рис. 2.19, б – замедленного движения. Уравнение равнопеременного движения точки имеет вид
Если
Рис. 2.20 Графики замедленного движения, скорости и касательного ускорения представлены на рис. 2.21.
Рис. 2.21
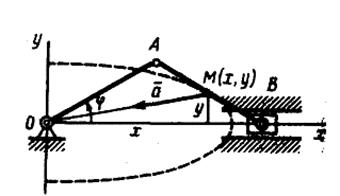
Задача 2.2. Определить траекторию, скорость и ускорение точки М шатуна кривошипно-ползунного механизма (рис. 2.22), если ОА=АВ=2b, а угол
Рис. 2.22
Решение. Начинаем с определения уравнений движения точки М. Проводя оси и обозначая координаты точки М в произвольном положении через х и у, находим:
Заменяя
Для определения траектории точки М представим уравнения движения в виде:
Возводя эти равенства в квадрат и складывая, получим
Итак, траектория точки М — эллипс с полуосями 3b и b. Теперь находим скорость точки М:
Скорость оказывается величиной переменной, изменяющейся с течением времени в пределах от Определяем проекции ускорения точки М:
отсюда
где r — длина радиуса-вектора, проведенного из центра О до точки М. Следовательно, модуль ускорения точки меняется пропорционально ее расстоянию от центра эллипса. Направление ускорения
Ускорение точки М все время направлено вдоль МО к центру эллипса.
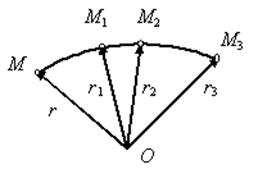
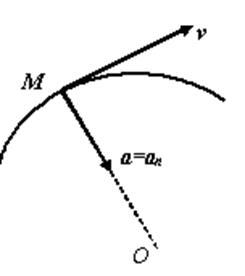
Задача 2.3. Локомотив движется равномерно по закруглению радиусом R = 600 м, причем ускорение его центра тяжести равно а = 0, 26 м/с2. Определить скорость центра тяжести локомотива. Решение. По условию задачи необходимо определить скорость центра тяжести локомотива, т.е. задача сводится к кинематике точки. Движение точки задано естественным способом, так как известна траектория движения. Покажем на рис. 2.23 траекторию – дугу радиусом R, на ней выберем начало и положительное направление отсчета дуговой координаты s.
Рис. 2.23
При естественном способе задания движения ускорение точки равно
В случае равномерного движения
где Окончательно имеем
На рис. 2.23 в произвольном положении точки изображены ее вектор скорости, направленный в сторону возрастания дуговой координаты, и ускорение, равное нормальному ускорению и направленному к центру кривизны траектории.
Задача 2.4. По заданным уравнениям движения точки М установить вид ее траектории и для момента времени
Рис. 2.24
где х и у в сантиметрах, t – в секундах. Решение. Параметрическим представлением траектории является сам закон движения. Уравнение траектории в координатной форме получаем, исключая из закона движения время:
Получили
Таблица 2.1
Траектория построена на рис. 2.24, на ней стрелкой показано направление движения точки из начального положения при Дифференцируя (2.5) по времени, находим проекции скорости точки на оси координат х, у:
При По найденным проекциям определяем модуль скорости
Дифференцируя (2.6), находим проекции вектора ускорения
При По найденным проекциям определяем модуль ускорения
Определение касательного ускорения при
Определение нормального ускорения при
Определение радиуса кривизны при
Результаты вычислений для заданного момента времени
Таблица 2.2
На рис. 2.24 показано положение точки М в заданный момент времени. Векторы скорости и ускорения точки М построены в масштабе по их проекциям на оси координат: Радиус кривизны проведен в сторону вогнутости траектории перпендикулярно к вектору скорости – по направлению
Таблица 2.3 Вокруг неподвижной оси
При вращении твердого тела вокруг неподвижной оси все точки тела описывают окружности, центры которых лежат на оси вращения. Расстояние точки от оси вращения, равное радиусу этой окружности, обозначим R. Скорость точки (рис. 2.28) М называется вращательной или окружной скоростью этой точки и ее величина определяется по формуле
Модуль вращательной скорости точки твердого тела равен произведению расстояния от точки до оси вращения на угловую скорость тела. Из формулы (2.8) следует, что модули вращательных скоростей различных точек вращающегося тела пропорциональны расстояниям от этих точек до оси вращения (рис. 2.29). Ускорение точки М определим по его составляющим: касательному ускорению, направленному по касательной к окружности, и нормальному ускорению, направленному к центру С.
Рис. 2.28 Рис. 2.29
Эти ускорения точек вращающегося тела называют в ращательным и центростремительным ускорениями и обозначают
Глава 8. Рычаг. Сцепление и трение скольжения
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Последнее изменение этой страницы: 2019-04-09; Просмотров: 480; Нарушение авторского права страницы
 приложены задаваемые силы
приложены задаваемые силы  , лежащие в плоскости чертежа, а ось рычага пересекает эту плоскость в точке О, которую называют опорной точкой (рис. 1.79). Реакция
, лежащие в плоскости чертежа, а ось рычага пересекает эту плоскость в точке О, которую называют опорной точкой (рис. 1.79). Реакция  оси рычага, уравновешивая задаваемые силы, лежит в их плоскости, но направление ее не известно.
оси рычага, уравновешивая задаваемые силы, лежит в их плоскости, но направление ее не известно.
 .
. на высоте d приложена горизонтальная сила
на высоте d приложена горизонтальная сила  , которая может не только сдвинуть тело, но и опрокинуть его при вращении вокруг ребра А. Считая, что сила
, которая может не только сдвинуть тело, но и опрокинуть его при вращении вокруг ребра А. Считая, что сила  , которая препятствует опрокидыванию. Составим сумму моментов задаваемых сил
, которая препятствует опрокидыванию. Составим сумму моментов задаваемых сил 
 , откуда
, откуда  .
. .
. .
.
 .
. (рис. 1.88). Применяя принцип освобождаемости от связей, мысленно отбросим связи (нить и тормозное устройство) и заменим их действие реакциями
(рис. 1.88). Применяя принцип освобождаемости от связей, мысленно отбросим связи (нить и тормозное устройство) и заменим их действие реакциями  ,
,  . Покажем силу сцепления
. Покажем силу сцепления  , которая направлена по касательной к барабану, в сторону, противоположную возможному движению.
, которая направлена по касательной к барабану, в сторону, противоположную возможному движению. .
.
 ; (а)
; (а) ; (б)
; (б) . (в)
. (в) между нормальной колодкой и барабаном определяется
между нормальной колодкой и барабаном определяется .
.
 ;
;  ;
; 
 .
. . Используя принцип освобождаемости от связей, мысленно отбросим связи (барабан и корпус тормозного устройства) и заменим их действие реакциями
. Используя принцип освобождаемости от связей, мысленно отбросим связи (барабан и корпус тормозного устройства) и заменим их действие реакциями  (рис. 1.89).
(рис. 1.89).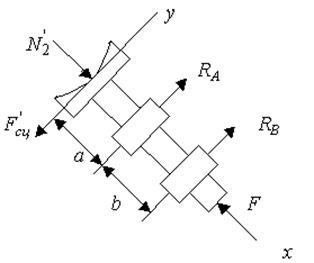
 , равную по модулю
, равную по модулю  .
. ; (г)
; (г) ; (д)
; (д) . (е)
. (е) .
. .
. .
. (рис. 1.90, а), стремящуюся его двигать по плоскости. Рассмотрим случай, когда сила
(рис. 1.90, а), стремящуюся его двигать по плоскости. Рассмотрим случай, когда сила 

 каток остается в покое, т. е. силы, действующие на каток, уравновешиваются. Кроме активных сил: веса
каток остается в покое, т. е. силы, действующие на каток, уравновешиваются. Кроме активных сил: веса  должна проходить через центр катка О, так как две другие силы приложены к этой точке. Следовательно, точка приложения реакции С должна быть смещена на некоторое расстояние
должна проходить через центр катка О, так как две другие силы приложены к этой точке. Следовательно, точка приложения реакции С должна быть смещена на некоторое расстояние  от вертикали, проходящей через центр колеса, иначе реакция
от вертикали, проходящей через центр колеса, иначе реакция  и касательную реакцию
и касательную реакцию  , являющуюся силой трения (рис. 1.90, б).
, являющуюся силой трения (рис. 1.90, б). ,
,  ) с моментом
) с моментом  (где r — радиус катка) и вторая пара сил (
(где r — радиус катка) и вторая пара сил (  ), удерживающая каток в равновесии. Момент второй пары, называемый моментом трения качения, определяется формулой
), удерживающая каток в равновесии. Момент второй пары, называемый моментом трения качения, определяется формулой ,
,  - коэффициент трения качения, измеряемый в единицах длины. Этот коэффициент можно рассматривать как расстояние, на которое смещается реакция N от вертикали, проходящей через центр катка.
- коэффициент трения качения, измеряемый в единицах длины. Этот коэффициент можно рассматривать как расстояние, на которое смещается реакция N от вертикали, проходящей через центр катка. ,
,  = 0, 2.
= 0, 2. и сила давления человека
и сила давления человека  (рис. 1.91, б) направлена по прямой СО, так как согласно теореме о трех непараллельных силах в случае равновесия линии их действия пересекаются в одной точке О. Реакцию плоскости
(рис. 1.91, б) направлена по прямой СО, так как согласно теореме о трех непараллельных силах в случае равновесия линии их действия пересекаются в одной точке О. Реакцию плоскости  , перпендикулярную к плоскости, и касательную составляющую — силу трения при качении
, перпендикулярную к плоскости, и касательную составляющую — силу трения при качении  , направленную вдоль плоскости.
, направленную вдоль плоскости.
 . Выберем систему декартовых координат. Ось х направим по горизонтальной плоскости вправо, ось у — вертикально вверх через центр катка. Составим уравнения равновесия. Обозначив буквой а угол между горизонталью (осью х) и рукояткой ОА, получим
. Выберем систему декартовых координат. Ось х направим по горизонтальной плоскости вправо, ось у — вертикально вверх через центр катка. Составим уравнения равновесия. Обозначив буквой а угол между горизонталью (осью х) и рукояткой ОА, получим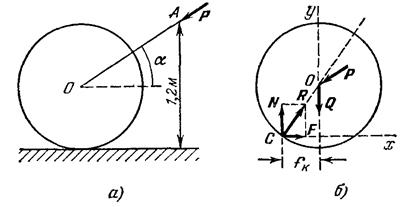
 ; (а)
; (а) ; (б)
; (б) . (в)
. (в) , приложенная в центре катка О, разложена на две составляющие — горизонтальную (
, приложенная в центре катка О, разложена на две составляющие — горизонтальную (  ) и вертикальную (
) и вертикальную (  ) и использована теорема Вариньона. При этом, как принято всегда делать, при вычислении момента горизонтальной составляющей силы
) и использована теорема Вариньона. При этом, как принято всегда делать, при вычислении момента горизонтальной составляющей силы 
 кН.
кН.  кН.
кН.  кН.
кН. и силы трения скольжения, будет ли в данном случае чистое качение или же будет иметь место скольжение. Сила трения скольжения равна
и силы трения скольжения, будет ли в данном случае чистое качение или же будет иметь место скольжение. Сила трения скольжения равна кН.
кН.

 на оси х, у, z, проведенные через точку О, равны главным моментам системы сил относительно этих осей:
на оси х, у, z, проведенные через точку О, равны главным моментам системы сил относительно этих осей: 


 можно определить по формулам:
можно определить по формулам: 

 приложены параллельные силы
приложены параллельные силы  , из которых силы
, из которых силы  направлены в одну сторону, а силы
направлены в одну сторону, а силы  - в противоположную (рис. 1.98).
- в противоположную (рис. 1.98).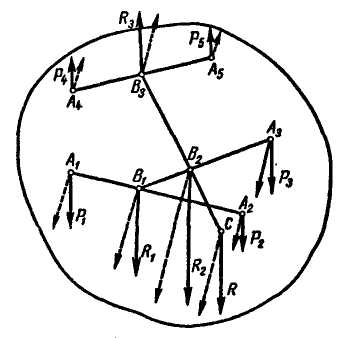
 и
и  по правилу сложения двух параллельных сил, направленных в одну сторону:
по правилу сложения двух параллельных сил, направленных в одну сторону:  .
. и точку приложения ее
и точку приложения ее  , складываем
, складываем  :
:  .
. :
:  .
. и
и  в точках
в точках  и
и  . В зависимости от модулей и точек приложения этих сил возможны следующие случаи.
. В зависимости от модулей и точек приложения этих сил возможны следующие случаи. и
и  не равны по модулю. Предположим, что в рассматриваемом случае (рис. 1.98)
не равны по модулю. Предположим, что в рассматриваемом случае (рис. 1.98)  >
>  . Тогда равнодействующая
. Тогда равнодействующая  заданных сил имеет модуль
заданных сил имеет модуль  и направлена в сторону большей силы
и направлена в сторону большей силы  , находится на продолжении отрезка
, находится на продолжении отрезка  за точкой приложения большей силы, причем
за точкой приложения большей силы, причем .
. , при повороте сил остаются справедливыми.
, при повороте сил остаются справедливыми. равны но модулю, но их линии действия не совпадают. В этом случае заданные силы приводятся к паре сил.
равны но модулю, но их линии действия не совпадают. В этом случае заданные силы приводятся к паре сил. равны по модулю и их линии действия совпадают. В этом случае заданные силы взаимно уравновешиваются.
равны по модулю и их линии действия совпадают. В этом случае заданные силы взаимно уравновешиваются. , приложенных в точках
, приложенных в точках  , приводящуюся к равнодействующей
, приводящуюся к равнодействующей  , приложенной в точке С (рис. 1.99).
, приложенной в точке С (рис. 1.99).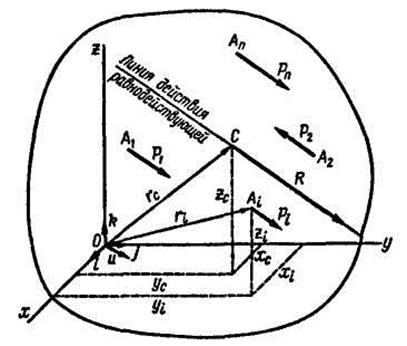
 относительно начала координат О или тремя координатами
относительно начала координат О или тремя координатами  . Положение точки приложения каждой силы
. Положение точки приложения каждой силы  определяется радиусом-вектором
определяется радиусом-вектором  или координатами
или координатами  , где i=1, 2, …, n.
, где i=1, 2, …, n. .
. .
. , вес тела G, координаты (рис. 1.100) его центра тяжести
, вес тела G, координаты (рис. 1.100) его центра тяжести  , а координаты любой частицы твердого тела
, а координаты любой частицы твердого тела 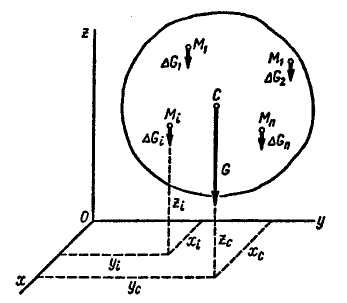

 всегда положительны, так как все силы направлены в одну сторону.
всегда положительны, так как все силы направлены в одну сторону. , где V- объем тела, γ - вес единицы объема. Тогда
, где V- объем тела, γ - вес единицы объема. Тогда .
.

 ,
,  - длина окружности, описанной центром тяжести фигуры; F – площадь фигуры вращения.
- длина окружности, описанной центром тяжести фигуры; F – площадь фигуры вращения. ,
, 
 , см
, см
 , см
, см
 , см
, см
 , см
, см
 , см
, см
 c м3;
c м3;  c м3.
c м3. см;
см;  см.
см. (рис. 1.109) с круглым отверстием радиусом
(рис. 1.109) с круглым отверстием радиусом  .
. . Координату
. Координату  определяем по формуле:
определяем по формуле: 


 .
.
 ,
,  ,
,  ,
,  .
.
 до пересечения с осями. Длины отсеченных на осях отрезков и будут координатами точек С.
до пересечения с осями. Длины отсеченных на осях отрезков и будут координатами точек С. см). В нашем сечении швеллер расположен горизонтально, причем ось y совпадает с краем полки фигуры. Координата
см). В нашем сечении швеллер расположен горизонтально, причем ось y совпадает с краем полки фигуры. Координата  равна половине высоты швеллера, то есть
равна половине высоты швеллера, то есть .
. центра тяжести швеллера подсчитаем следующим образом: из размера полосы 42 см вычтем заданное в сортаменте расстояние
центра тяжести швеллера подсчитаем следующим образом: из размера полосы 42 см вычтем заданное в сортаменте расстояние  см, то есть
см, то есть c м.
c м. .
. . Дуговая координата не всегда совпадает с длиной пути, пройденным движущейся точкой. Дуговая координата s точки М в некоторый момент времени t может быть равна пути, пройденному точкой за промежуток времени [0, t] только в том случае, если движение точки начинается из точки О (начала отсчета дуговой координаты) и совершается в положительном направлении.
. Дуговая координата не всегда совпадает с длиной пути, пройденным движущейся точкой. Дуговая координата s точки М в некоторый момент времени t может быть равна пути, пройденному точкой за промежуток времени [0, t] только в том случае, если движение точки начинается из точки О (начала отсчета дуговой координаты) и совершается в положительном направлении. , т.е. единицы длина/время. В качестве единиц измерения принимают обычно м/с или км/ч.
, т.е. единицы длина/время. В качестве единиц измерения принимают обычно м/с или км/ч. .
. определяет алгебраическое значение скорости, знак этой производной указывает, в какую сторону по касательной к траектории (в направлении возрастания или убывания дуговой координаты s) направлен вектор скорости
определяет алгебраическое значение скорости, знак этой производной указывает, в какую сторону по касательной к траектории (в направлении возрастания или убывания дуговой координаты s) направлен вектор скорости  .
. .
. .
.


 .
.
 .
.

 .
.





 .
. .
. .
. .
. точка движется по направлению оси х, при
точка движется по направлению оси х, при  - противоположно направлению оси.
- противоположно направлению оси. ; (2.1)
; (2.1) . (2.2)
. (2.2)
 ; (2.3)
; (2.3) (2.4)
(2.4) .
. , т.е. единицы длина/время2.
, т.е. единицы длина/время2. .
.
 расположен в плоскости кривой, являющейся траекторией точки и направлен в сторону ее вогнутости.
расположен в плоскости кривой, являющейся траекторией точки и направлен в сторону ее вогнутости. .
. ,
, 
 ,
,  ,
,  - углы, образованные направлением ускорения с принятыми направлениями касательной и главной нормали в данной точке.
- углы, образованные направлением ускорения с принятыми направлениями касательной и главной нормали в данной точке.
 .
.




 , и противоположно оси х, если
, и противоположно оси х, если  .
. Если в течение некоторого промежутка времени нормальное и касательное ускорения точки равны нулю, то в течение этого промежутка не изменяются ни направление, ни модуль скорости, т.е. точка движется равномерно-прямолинейно и ее ускорение равно нулю.
Если в течение некоторого промежутка времени нормальное и касательное ускорения точки равны нулю, то в течение этого промежутка не изменяются ни направление, ни модуль скорости, т.е. точка движется равномерно-прямолинейно и ее ускорение равно нулю. . Если в течение некоторого промежутка времени не равно нулю нормальное ускорение и равно нулю касательное ускорение, то происходит изменение направления скорости без изменения ее модуля, т. е. точка движется равномерно-криволинейно и модуль ее ускорения (рис. 2.16)
. Если в течение некоторого промежутка времени не равно нулю нормальное ускорение и равно нулю касательное ускорение, то происходит изменение направления скорости без изменения ее модуля, т. е. точка движется равномерно-криволинейно и модуль ее ускорения (рис. 2.16) .
.
 в некоторый момент времени, то точка не движется равномерно, а в этот момент времени модуль ее скорости имеет максимум, или минимум.
в некоторый момент времени, то точка не движется равномерно, а в этот момент времени модуль ее скорости имеет максимум, или минимум. .
. .
.
 .
. . Если в течение некоторого промежутка времени равно нулю нормальное ускорение точки и не равно нулю касательное, то направление скорости не изменяется, а изменяется ее модуль, т.е. точка движется по прямой неравномерно. Модуль ускорения точки в этом случае (рис. 2.18)
. Если в течение некоторого промежутка времени равно нулю нормальное ускорение точки и не равно нулю касательное, то направление скорости не изменяется, а изменяется ее модуль, т.е. точка движется по прямой неравномерно. Модуль ускорения точки в этом случае (рис. 2.18)
 . Если в течение некоторого промежутка времени ни нормальное, ни касательное ускорения точки не равны нулю, то изменяется как направление, так и модуль ее скорости, т. е. точка совершает неравномерно-криволинейное движение. Модуль ускорения точки
. Если в течение некоторого промежутка времени ни нормальное, ни касательное ускорения точки не равны нулю, то изменяется как направление, так и модуль ее скорости, т. е. точка совершает неравномерно-криволинейное движение. Модуль ускорения точки
 , то при ускоренном движении
, то при ускоренном движении  , а при замедленном движении
, а при замедленном движении  . Формула скорости равнопеременного движения точки имеет вид
. Формула скорости равнопеременного движения точки имеет вид .
.
 – ускоренное движение
– ускоренное движение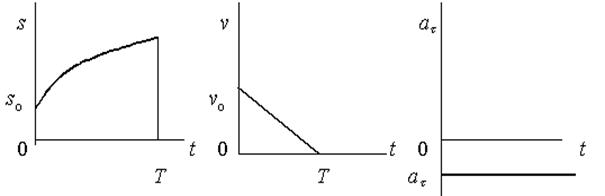
 –- замедленное движение
–- замедленное движение при вращении кривошипа растет пропорционально времени
при вращении кривошипа растет пропорционально времени  .
.
 .
.  .
. .
. .
.
 .
. до
до  .
. 
 ,
,  определяем по направляющим косинусам:
определяем по направляющим косинусам:  .
.
 .
. . Тогда
. Тогда  , но
, но ,
,  - радиус кривизны траектории в данной ее точке. В нашем случае
- радиус кривизны траектории в данной ее точке. В нашем случае  = 600 м в любой точке траектории.
= 600 м в любой точке траектории. м/с.
м/с. , найти положение точки на траектории, ее скорость, касательное, нормальное и полное ускорения, а также радиус кривизны траектории (рис. 2.24):
, найти положение точки на траектории, ее скорость, касательное, нормальное и полное ускорения, а также радиус кривизны траектории (рис. 2.24): 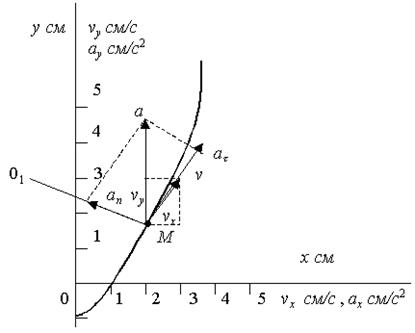
 , (2.5)
, (2.5) .
. , то есть траекторией точки является парабола. Для построения траектории рассчитаем по уравнениям координаты точек параболы, отвечающие нескольким моментам времени. Результаты расчетов приведены в табл. 2.1.
, то есть траекторией точки является парабола. Для построения траектории рассчитаем по уравнениям координаты точек параболы, отвечающие нескольким моментам времени. Результаты расчетов приведены в табл. 2.1. с координатами
с координатами  .
. . (2.6)
. (2.6)
 .
. .
. .
. .
. .
.
 .
. .
. .
. , там же показаны касательное и нормальное ускорения. Совпадение величин
, там же показаны касательное и нормальное ускорения. Совпадение величин  и
и  , найденных из чертежа, с их значениями, полученными аналитически, служит контролем правильности решения.
, найденных из чертежа, с их значениями, полученными аналитически, служит контролем правильности решения. (2.8)
(2.8)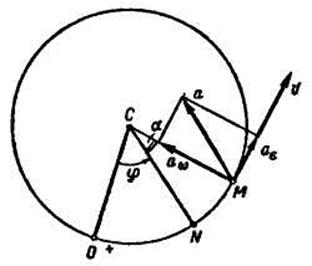

 и
и  (рис. 2.29)
(рис. 2.29) (2.9)
(2.9)