
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Уравнения равновесия сил, произвольно расположенных
в пространстве
Для равновесия произвольной пространственной системы сил, приложенных к твердому телу, необходимо и достаточно, чтобы главный вектор и главный момент этой системы сил равнялись нулю:
Условию равновесия в векторной форме соответствуют шесть уравнений равновесия:
Первые три уравнения (а) называются уравнениями моментов сил относительно осей координат, а последние — уравнениями проекций сил на оси. Для равновесия параллельной системы сил, приложенных к твердому телу, необходимо и достаточно, чтобы главный вектор и главный момент этой системы сил равнялись нулю:
Условиям равновесия в векторной форме для параллельной системы сил соответствуют три уравнения равновесия:
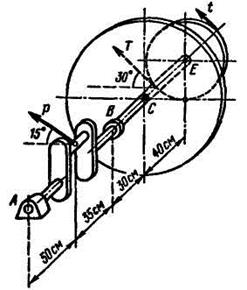
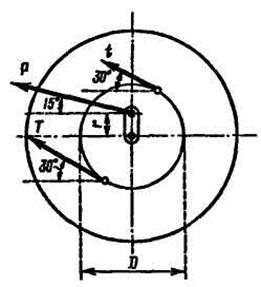
Задача 1.16. На рис. 1.94 изображен коленчатый вал двигателя. При вертикальном положении средней плоскости колена давление шатуна на середину шейки вала составляет Р = 12 кН и направлено в плоскости, перпендикулярной оси вала, под углом 15° к горизонтали. На оси вала в точке С закреплен маховик весом G = 12 кН. В точке E укреплен шкив диаметром D = 80 см с ремнем, передающим момент на вал рабочей машины. Ветви ремня лежат в плоскости шкива и составляют с горизонталью угол, равный 30°. Отношение натяжения ведущей и ведомой ветвей T/t = 2. Расстояние от оси шейки колена до оси вала r = 15 см. Расстояния по оси вала указаны на рис. 1.94 в сантиметрах. Определить натяжения ветвей ремня T и t реакции подшипников А и В при равномерном вращении вала и при заданном его положении. (Весом шкива и вала можно пренебречь).
Рис. 1.94 Рис. 1.95
Решение. Объект равновесия – коленчатый вал, т.е. балка АЕ с ломаной осью. Показываем задаваемые силы: вес маховика Начало координат помещаем в точку А, ось х направляем по оси вала перпендикулярно плоскости чертежа, оси y, z – перпендикулярно к оси х (лежат в плоскости чертежа). Для произвольной пространственной системы сил необходимым и достаточным условием равновесия является равенство нулю главного вектора и главного момента:
Выбрав оси координат, как показано на рис. 1.96, составляем уравнения равновесия сил, произвольно расположенных в пространстве. Вал имеет две точки опоры А и В; первым составляем уравнение моментов относительно оси х, проходящей через эти точки.
1.
Рис. 1.96 Рис. 1.97
Так как
откуда
Затем составляем следующие уравнения моментов по рис. 1.97. При вычислении моментов сил Полученные проекции 2.
Откуда
Аналогично при составлении уравнения
3.
Определяем
Составляем уравнения проекций на оси у и z (все действующие силы, перпендикулярные оси х, и уравнение
4.
Находим
5.
Определяем
Глава 10. Центр тяжести
|
Последнее изменение этой страницы: 2019-04-09; Просмотров: 277; Нарушение авторского права страницы

 (а)
(а) ;
;  .
.

 , давление шатуна на шейку вала
, давление шатуна на шейку вала  и реакции ветвей ремня
и реакции ветвей ремня  и
и  , направленные по касательной к окружности обода шкива. Отбрасывая связи (подшипника), прикладываем к валу их реакции, разложенные на составляющие
, направленные по касательной к окружности обода шкива. Отбрасывая связи (подшипника), прикладываем к валу их реакции, разложенные на составляющие  (рис. 1.95).
(рис. 1.95). .
. .
.
 , то модули сил t и Т можно определить так:
, то модули сил t и Т можно определить так:  ,
,  кН;
кН;  кН.
кН. и
и  относительно оси у проецируем каждую из этих сил на плоскость, проходящую через точку приложения силы перпендикулярно оси у.
относительно оси у проецируем каждую из этих сил на плоскость, проходящую через точку приложения силы перпендикулярно оси у. параллельны оси z.
параллельны оси z.
 ,
, 
 находим проекции сил
находим проекции сил  ,
,  .
. :
:  .
. :
: 
 преобразуются в тождество 0 = 0).
преобразуются в тождество 0 = 0). .
. :
:  .
. .
. :
: 