
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Глава 1. Скорости точки при различных способах
задания движения
1.1. Естественный способ задания движения точки, определение Скорости точки
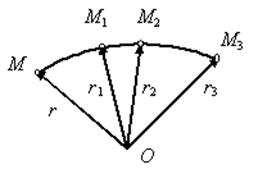
Естественный способ задания движения точки применяется в случае, когда траектория точки заранее известна (движение транспортных средств по рельсовому пути, автомобильным дорогам). Линия, представляющая собой геометрическое место последовательных положений движущейся точки в рассматриваемой системе отсчета, называется траекторией (рис. 2.1). Траектория движения транспортных средств – дороги – характеризуются допустимой кривизной и наибольшим уклоном. Для железных дорог рекомендуются радиусы кривизны 400–4000 м, допустимые радиусы кривизны в трудных условиях 300–2000 м, наибольший уклон профиля 1, 5–2, 5 градуса. Для автомобильных дорог наименьший радиус кривизны может находится в пределах 250 – 260 м, а наибольший уклон – 4–5 градусов.
 
Рис. 2.1
Положение движущейся точки М на траектории определяется дуговой координатой, т. е. расстоянием ОМ = s. При движении точки М расстояние s от этой точки до неподвижной точки О изменяется с течением времени, т. е. дуговая координата s является функцией времени:
Эта функция однозначна (точка в каждое мгновение занимает на траектории только одно положение), непрерывна (точка не может перейти из одного положения в другое, минуя промежуточное), дважды дифференцируема и называется уравнением движения. Таким образом, движение точки определено, если известны следующие элементы: траектория точки, начало и направление отсчета дуговой координаты и уравнение движения Одной из основных кинематических характеристик движения точки является скорость. Скорость – это векторная величина, характеризующая быстроту и направление движения точки в данной системе отсчета. Размерность скорости Модуль скорости равен абсолютному значению производной от дуговой координаты точки по времени.
Производная
1.2. Векторный способ задания движения, определение скорости Точки
Положение точки в пространстве однозначно определяется заданием радиуса-вектора, проведенного из некоторого неподвижного центра О в данную точку М (рис. 2.2). Для определения движения точки должна быть задана вектор-функция аргумента t
При векторном способе задания движения положение движущейся точки в каждый момент времени (рис. 2.3) определяется радиусом-вектором. Вектор скорости точки в данный момент равен производной от радиуса-вектора точки по времени.
Рис. 2.2 Рис. 2.3
Вектор скорости точки направлен по касательной к траектории в сторону движения точки. При движении точки по криволинейной траектории направление вектора скорости непрерывно изменяется (рис. 2.4).
Рис. 2.4
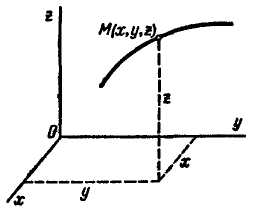
1.3. Координатный способ задания движения точки, определение Скорости точки Положение точки М в системе отсчета Оху z определяется тремя декартовыми координатами точки х, у, z (рис. 2.5). При движении точки М ее координаты изменяются с течением времени. Следовательно, координаты х, у, z движущейся точки М являются функциями времени t:
Эти уравнения называются уравнениями движения точки в декартовых координатах.
Рис. 2.5
Движение точки М в одной плоскости определяется двумя уравнениями движения (рис. 2.6, а):
а) б)
Рис. 2.6
Прямолинейное движение точки М определяется одним уравнением движения (рис. 2.6, б)
Уравнения движения, определяющие координаты точки в любой момент времени, можно рассматривать как параметрические уравнения траектории точки, а время – как независимый переменный параметр. При исключении параметра t из уравнений движения получаются уравнения траектории точки в координатной форме. Пусть уравнения движения точки М имеют вид
Решив первое уравнение относительно t, получим Подставив полученное для t выражение в два других уравнения, найдем уравнения траектории точки в координатной форме:
Два уравнения с тремя координатами определяют линию в пространстве, т.е. траекторию точки. Пусть движение точки М в плоскости задано уравнениями
Исключив параметр t, получим уравнение траектории точки в координатной форме:
Помимо декартовых координат для определения положения точки на плоскости и в пространстве применяют и другие системы координат (полярные, цилиндрические, сферические и др.). Определим модуль и направление скорости точки по уравнениям ее движения в декартовых координатах (рис. 2.7).
Рис. 2.7
Проекции скорости точки на неподвижные оси декартовых координат равны первым производным от соответствующих координат точки по времени. Вычислив проекции скорости на оси декартовых координат, можно определить модуль и направление скорости точки по следующим формулам:
Движение точки в плоскости хОу задается двумя уравнениями движения. Модуль и направление скорости точки в этом случае определяются так:
Прямолинейное движение точки задается одним уравнением. В этом случае модуль скорости точки равен абсолютной величине проекции скорости на ось х:
При
Задача 2.1. Кривошип ON длиною а вращается вокруг оси, перпендикулярной к плоскости рисунка и проходящей через точку О. Угол φ между неподвижной осью Ох и кривошипом изменяется пропорционально времени: φ = kt. Составить уравнения движения точки N в декартовой системе координат. Найти уравнения ее траектории (рис. 2.8). Решение. Для составления уравнений движения точки N надо выразить ее координаты как функции времени. Из рисунка находим координаты x, y точки N:
Рис. 2.8
Это и будут искомые уравнения движения точки N. Чтобы найти уравнение траектории точки в явной форме, надо исключить из уравнений движения время. Для этого возведем каждое уравнение движения (2.1 и 2.2) в квадрат
и сложим уравнения (2.3) и (2.4):
Это уравнение траектории точки N - уравнение окружности радиусом а с центром в начале координат. |
Последнее изменение этой страницы: 2019-04-09; Просмотров: 351; Нарушение авторского права страницы
 .
. . Дуговая координата не всегда совпадает с длиной пути, пройденным движущейся точкой. Дуговая координата s точки М в некоторый момент времени t может быть равна пути, пройденному точкой за промежуток времени [0, t] только в том случае, если движение точки начинается из точки О (начала отсчета дуговой координаты) и совершается в положительном направлении.
. Дуговая координата не всегда совпадает с длиной пути, пройденным движущейся точкой. Дуговая координата s точки М в некоторый момент времени t может быть равна пути, пройденному точкой за промежуток времени [0, t] только в том случае, если движение точки начинается из точки О (начала отсчета дуговой координаты) и совершается в положительном направлении. , т.е. единицы длина/время. В качестве единиц измерения принимают обычно м/с или км/ч.
, т.е. единицы длина/время. В качестве единиц измерения принимают обычно м/с или км/ч. .
. определяет алгебраическое значение скорости, знак этой производной указывает, в какую сторону по касательной к траектории (в направлении возрастания или убывания дуговой координаты s) направлен вектор скорости
определяет алгебраическое значение скорости, знак этой производной указывает, в какую сторону по касательной к траектории (в направлении возрастания или убывания дуговой координаты s) направлен вектор скорости  .
. .
. .
.


 .
.
 .
.

 .
.





 .
. .
. .
. .
. точка движется по направлению оси х, при
точка движется по направлению оси х, при  - противоположно направлению оси.
- противоположно направлению оси. ; (2.1)
; (2.1) . (2.2)
. (2.2)
 ; (2.3)
; (2.3) (2.4)
(2.4) .
.