
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Описание систем в пространстве состояний
Описание систем во временной области лежит в основе современной теории управления. Временная область – это область, в которой поведение системы рассматривается как функция переменной
Рис. 8.1.1
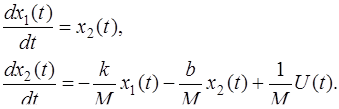
Пример. Рассмотрим механическую систему «масса – пружина» с затуханием, изображенную на рис. 8.1.2.
Рис. 8.1.2
Дифференциальное уравнение, описывающее поведение системы, обычно записывается в виде
Число переменных состояния, выбираемых для описания системы, должно быть по возможности минимальным, чтобы среди них не было излишних. Для данной системы вполне достаточно иметь две переменные состояния – положение и скорость движения массы:
С учетом переменных состояния, уравнение (8.1.1) примет вид:
Это уравнение можно представить в виде эквивалентной системы двух дифференциальных уравнений первого порядка:
Уравнения (8.1.3) описывают поведение системы в терминах скорости изменения каждой переменной состояния. Переменные состояния, описывающие систему, не являются единственными и всегда можно выбрать альтернативную комбинацию таких переменных. Например, для приведенной выше системы «масса – пружина» в качестве переменных состояния можно выбрать любые две линейно-независимые комбинации Переменные состояния характеризуют динамику системы. Инженера в первую очередь интересуют физические системы, в которых переменными состояния являются напряжения, токи, скорости, перемещения, давления, температуры и другие физические величины. Однако понятие состояния применимо к анализу не только физических, но также биологических, социальных и экономических систем. Для этих систем понятие состояния не ограничивается рамками представлений об энергии и подходит к переменным состояния в более широком смысле, трактуя их как переменные любой природы, описывающие будущее поведение системы. В общем случае систему обыкновенных дифференциальных уравнений, которая описывает систему управления в переменных состояния, можно представить в виде:
где Если
где Заметим, что систему управления в переменных состояния можно представить и в дискретной форме:
где
Кроме того, системы (8.1.6), (8.1.7) могут быть как стационарными, так и нестационарными. В дальнейшем, будем считать, что математическая модель, описывающая поведение управляемого объекта задана в виде (8.1.5) или (8.1.7). Использование линейных систем для описания моделей объектов обусловлено тем, что идеи и методы линейной теории автоматического управления с соответствующими оговорками широко используются и для других моделей объектов управления. Кроме того, математический аппарат матричной алгебры достаточно легко реализуется на ЭВМ.
|
Последнее изменение этой страницы: 2019-04-10; Просмотров: 316; Нарушение авторского права страницы
 (времени). Анализ и синтез систем управления во временной области основан на понятии состояния системы. Состояние системы – это совокупность таких переменных, знание которых наряду с входными функциями и уравнениями, описывающими динамику системы, позволяет определить ее будущее состояние и выходную переменную. Для динамической системы ее состояние описывается набором переменных состояния
(времени). Анализ и синтез систем управления во временной области основан на понятии состояния системы. Состояние системы – это совокупность таких переменных, знание которых наряду с входными функциями и уравнениями, описывающими динамику системы, позволяет определить ее будущее состояние и выходную переменную. Для динамической системы ее состояние описывается набором переменных состояния  . Это такие переменные, которые определяют будущее поведение системы, если известно ее текущее состояние и все внешние воздействия. Например, для системы, структурная схема которой изображена на рис. 8.1.1, переменные
. Это такие переменные, которые определяют будущее поведение системы, если известно ее текущее состояние и все внешние воздействия. Например, для системы, структурная схема которой изображена на рис. 8.1.1, переменные  известны начальные значения
известны начальные значения  и входные сигналы
и входные сигналы  для
для  , то этой информации достаточно, чтобы определить будущие значения всех переменных состояния и выходных переменных. Таким образом, переменные состояния описывают поведение систем в будущем, если известны текущее состояние, внешние воздействия и уравнения динамики системы.
, то этой информации достаточно, чтобы определить будущие значения всех переменных состояния и выходных переменных. Таким образом, переменные состояния описывают поведение систем в будущем, если известны текущее состояние, внешние воздействия и уравнения динамики системы.

 . (8.1.1)
. (8.1.1) (8.1.2)
(8.1.2) .
. (8.1.3)
(8.1.3) и
и  . На практике в качестве переменных состояния часто выбирают такие физические переменные, которые легко могут быть измерены.
. На практике в качестве переменных состояния часто выбирают такие физические переменные, которые легко могут быть измерены. , (8.1.4)
, (8.1.4) - вектор состояния;
- вектор состояния;  - вектор управляющих воздействий,
- вектор управляющих воздействий,  - вектор-функция указанных аргументов, задающая динамику системы,
- вектор-функция указанных аргументов, задающая динамику системы,  - вектор начального состояния.
- вектор начального состояния. и (или)
и (или)  нелинейно, то система (8.1.4) называется нелинейной, если систему (8.1.4) можно представить в виде:
нелинейно, то система (8.1.4) называется нелинейной, если систему (8.1.4) можно представить в виде: , (8.1.5)
, (8.1.5) – матрица динамических свойств модели объекта, размерности
– матрица динамических свойств модели объекта, размерности  ,
,  – матрица влияния управляющих воздействий, размерности
– матрица влияния управляющих воздействий, размерности  , то такая система называется линейной. Если элементы матрицы
, то такая система называется линейной. Если элементы матрицы  и (или)
и (или)  зависят от времени, то система (8.1.5) является нестационарной, если ни один из элементов матриц
зависят от времени, то система (8.1.5) является нестационарной, если ни один из элементов матриц  , (8.1.6)
, (8.1.6) вектор состояния на
вектор состояния на  -ом такте;
-ом такте;  вектор управляющих воздействий;
вектор управляющих воздействий;  вектор-функция дискретных аргументов, задающая динамику системы на
вектор-функция дискретных аргументов, задающая динамику системы на  вектор начального состояния. Аналогично (8.1.4) система (8.1.6) может быть нелинейной и линейной, представимой в виде:
вектор начального состояния. Аналогично (8.1.4) система (8.1.6) может быть нелинейной и линейной, представимой в виде: . (8.1.7)
. (8.1.7)