|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Индуктивные преобразователи
Работа индуктивных преобразователей основана на явлении электромагнитной индукции. Согласно этому явлению, если катушку питать переменным током, в катушке индуцируется ЭДС самоиндукции. ЭДС самоиндукции создает дополнительное индуктивное сопротивление катушки, которое пропорционально произведению L∙ ω. Тогда полное сопротивление катушки складывается из омического сопротивления R и индуктивного сопротивления Z=√ R2+(L∙ ω )2, где L – индуктивность катушки, параметр любого электромагнита, связывающий магнитный поток и силу тока; ω – угловая частота переменного тока питания катушки, ω =2π f=2π ∙ 50 Гц. Свойство катушки электромагнита – изменять свое полное сопротивление при изменении индуктивности, используется в индуктивных преобразователях. На рисунке 4.18 показана схема простого индуктивного преобразователя с изменяющимся зазором. Такой преобразователь представляет собой электромагнит, у которого катушка 1 питается переменным током постоянного напряжения. Магнитопровод выполнен из ферромагнитного материала (железо) и состоит из двух частей: неподвижной (сердечника 2) и подвижной (якоря 3). Между сердечником и якорем устанавливается воздушный зазор S.
Рис. 4.18 Схема простого индуктивного Рис 4.19 Характеристика преобразователя индуктивного преобразователя Измерительный стержень 4 перемещается в направляющих 7 и жестко связан с якорем электромагнита. Измерительное усилие создается пружиной 5.Все элементы преобразователя компануются в корпусе 6. Величина воздушного зазора S с одной стороны зависит от контролируемого параметра Нтн, а с другой, оказывает влияние на индуктивность катушки L. Следовательно, для пользования индуктивным преобразователем необходимо знать зависимость L=f(S), которая называется характеристикой преобразователя. Для данной схемы эта зависимость имеет следующий вид: (Генри)
n – количество витков катушки; ℓ - длина электропровода катушки; S и F – величина и площадь воздушного зазора; S1 и F1 – длина магнитных линий и площадь сечения магнитопровода; μ и μ 1 – магнитная проницаемость воздуха и материала магнитопровода. При измерениях переменными величинами являются S и S1. Однако эти переменные взаимозависимы. Поэтому формула (4.2) позволяет для каждого преобразователя построить зависимость L=f(S). На рисунке 4.19 в качестве примера представлена характеристика индуктивного преобразователя. Характеристика индуктивного преобразователя позволяет получить высокую точность измерения. С другой стороны, она является нелинейной, что ограничивает возможности применения этих преобразователей. Для работы выбирают участок характеристики ∆ S с наименьшей нелинейностью, т.е. участок с примерно равной чувствительностью (передаточным отношением dS/dL= Const). Этот участок определяет диапазон и пределы измерений преобразователя Q. Относительная величина ∆ S/So является параметром характеристики: ∆ S = Smax – Smin,
где ∆ S – диапазон измерений; Smax и Smin – допустимые зазоры, пределы измерений; S0 = (Smax +Smin)/2 – средняя величина зазора. Для индуктивных преобразователей с простой схемой измерение относительный диапазон составляет ∆ S/So нелинейность весьма большая ≈ 10%. На практике это приводит к уменьшению диапазона измерений или к погрешностям измерений.
Рис.4.20 Схема дифференциального преобразователя
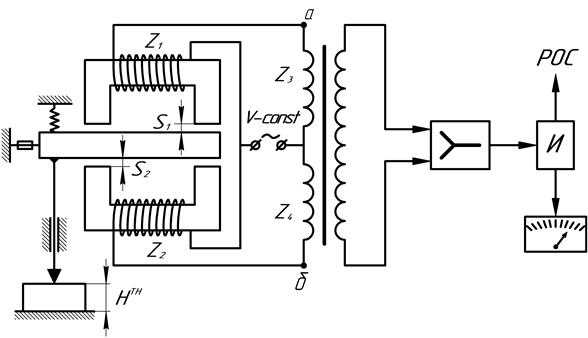
С целью получения более линейной характеристики применяют преобразователи с дифференциальной схемой измерения. Дифференциальные преобразователи имеют две магнитные цепи (рисунок 4.20) с общим якорем. Под влиянием контролируемого параметра dTd величина зазоров S1 и S2 изменяется одинаково, но с различным знаком:
S1 = S + ∆ S S2 = S - ∆ S.
При этом сопротивление в катушках первой и второй магнитной цепи составят: ______________ Z1 = √ ω 2 ( L - ∆ L )2 + R 2 _ Z2 = √ ω 2(L + ∆ L)2 + R2
Не линейность характеристики дифференциальных преобразователей порядка 1% … 2%. Кроме того, такие преобразователи имеют более высокую точность измерения (≈ в 2 раза выше точности измерения простыми преобразователями), меньше чувствительны к окружающей среде и измерениям питающего напряжения. Включение дифференциального преобразователя в измерительную схему осуществляется по мостовой схеме. Катушки Z1 и Z2 преобразователя и сопротивления Z3 и Z4 с блоком питания в 10 кГц образуют индуктивный мост. Для получения большей отдачи мощности от преобразователя сопротивления Z3 и Z4 делают первичной обмоткой трансформатора. Выходное переменное напряжение в точках “а” и “б” диагонали моста через трансформатор, а затем усилитель и выпрямитель, передается на исполнительный механизм и показывающий прибор. К достоинствам индуктивных преобразователей относятся: - непрерывность и дистанционность измерения; - отсутствие электромеханических контактов, что повышает надежность преобразователей; - один источник энергии; - компактность; - высокая точность измерения (±0, 5 мкм) Применение индуктивных преобразователей ограничивается следующими факторами: - сравнительная сложность электрических элементов; - квалифицированное обслуживание в процессе эксплуатации; - необходимость надежной герметизации преобразователя; - требуется жесткая стабилизация напряжения источников питания, а также внешних температурных факторов; - вследствие нелинейности характеристики имеют сравнительно небольшой диапазон измерений (∆ S ≈ 0, 6 мм) и небольшой ход измерительного стержня (1…1, 6мм). Типовой индуктивный преобразователь с дифференциальной схемой измерения имеет следующие показатели: - рабочий участок характеристики ∆ S ±0, 3мм; - ход измерительного стержня ±0, 5…±0, 8мм; - чувствительность на рабочем участке 0, 1мВ/мкм - нелинейность на рабочем участке 2% - погрешность измерения ±0, 5мкм - измерительное усилие ±2Н - напряжение питания 10…30В - частота питающего тока 50кГц В качестве материала магнитопровода рекомендуется применять листовую кремневую сталь (марки Э21, Э31). Сердечник выполняется виде Ш – и П – образных магнитопроводов.
Рис. 4.21 Схема индуктивного преобразователя с переменной площадью
Наряду с преобразователями с изменяющейся величиной воздушного зазора S применяются индуктивные преобразователи с переменной площадью F воздушного зазора (рисунок 4.21), которые имеют линейную характеристику L = f(F). Однако точность измерения этих преобразователей невысока (~ в 10 раз ниже). Их используют для измерений больших перемещений и в труднодоступных местах. Они очень удобны в эксплуатации вследствие своей компактности.
|
Последнее изменение этой страницы: 2019-04-19; Просмотров: 406; Нарушение авторского права страницы


 (4.3),
(4.3),